一种考虑多维非线性扰动的电子助力制动系统自适应压力控制方法
- 国知局
- 2024-09-14 14:30:14
本发明属于汽车,具体的说是一种考虑多维非线性扰动的电子助力制动系统自适应压力控制方法。
背景技术:
1、安全需求日益增加的智能电动汽车要求底盘制动系统具备精确、快速的主动制动能力。为此,国内外各大研究机构围绕一种以“电机与传动机构”为核心,且保留传统液压电子控制单元的电子助力制动系统展开了广泛研究。在主动制动过程中,机-电-液耦合的电子助力制动系统面临复杂的多维非线性扰动问题,这对其压力精确控制提出巨大的挑战。
2、目前,已有部分学者围绕电子助力制动系统压力精确控制开展了相关研究。通常可以通过拟合制动主缸实际压力与输入推杆间的动态映射特性(简称p-v特性),实现电子助力制动系统制动压力调控。然而,由于制动液泄露、制动液与管路摩擦等原因,电子助力制动系统存在复杂的液压时变不确定性扰动问题,拟合单一p-v特性难以准确反映电子助力制动系统工作状态。与之相比,通过数理模型对液压系统进行精确建模,能够帮助电子助力制动系统获得更优的压力控制性能,但这种用于表征液压时变不确定性扰动的复杂液压模型内部参数较多且精确度获取存在困难。此外,一方面电子助力制动系统内置伺服电机需要通过传动机构完成制动压力调控,面临着显著的静摩擦、库仑摩擦与粘性摩擦等非线性摩擦阻碍干扰。另一方面,常见的电子助力制动系统内部伺服电机为高性能永磁同步电机。永磁同步电机高速转动过程中存在的电机电磁轴和转矩轴电磁特性动态耦合问题,也会影响电子助力制动系统压力调控性能。
技术实现思路
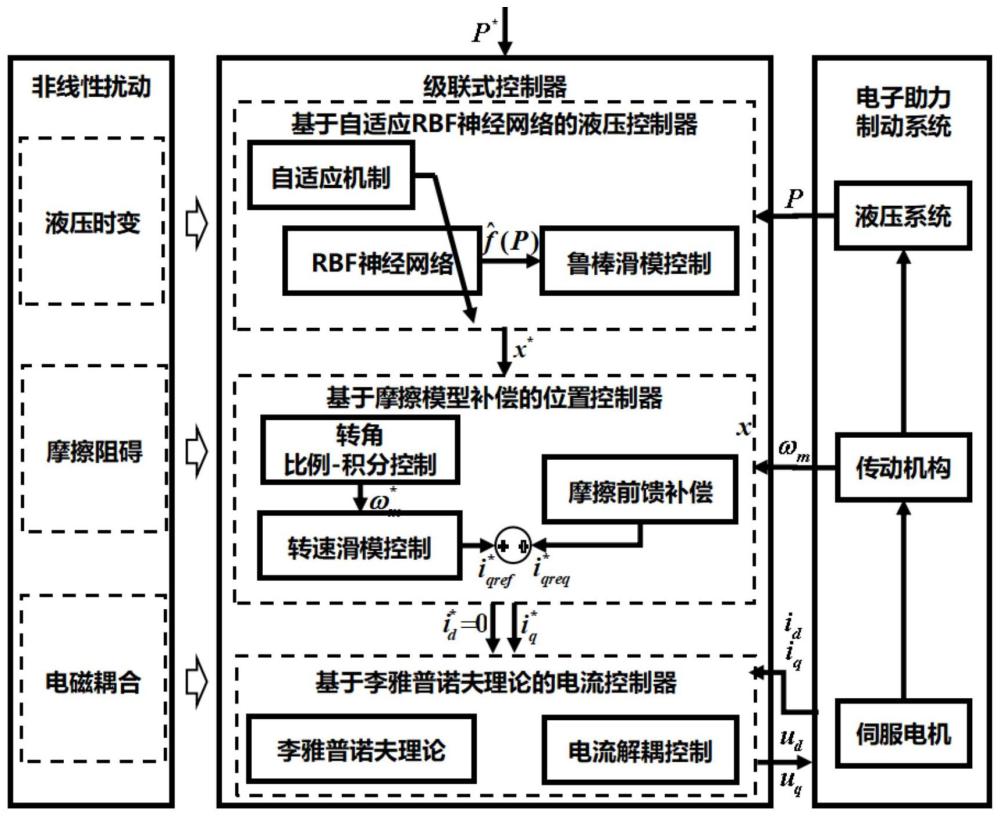
1、为解决上述问题,本发明提供了一种考虑多维非线性扰动的电子助力制动系统自适应压力控制方法,采用自适应径向基函数神经网络和鲁棒滑模理论,设计了电子助力制动系统液压控制器,采用摩擦前馈补偿和滑模控制理论,设计了电子助力制动系统位置控制器,采用李雅普诺夫理论,设计了电子助力制动系统电流控制器,最终实现了对电子助力制动系统自适应压力进行控制,为智能汽车高品质主动制动压力控制提供了一种合理的解决方案。
2、本发明技术方案结合附图说明如下:
3、一种考虑多维非线性扰动的电子助力制动系统自适应压力控制方法,包括以下步骤:
4、步骤一、建立电机、液压与摩擦力的关键模型;
5、步骤二、设计液压-位置-电流级联式控制器,从而实现对电子助力制动系统自适应压力的控制;其中,液压控制器应用自适应径向基函数神经网络和鲁棒滑模理论解决液压时变不确定性扰动问题;位置控制器引入摩擦前馈补偿和滑模控制解决传动机构非线性摩擦阻碍问题;电流控制器应用李雅普诺夫理论设计电流解耦方案解决永磁同步电机电磁特性动态耦合问题。
6、进一步的,所述步骤一的具体方法如下:
7、11)根据永磁同步电机输出轴转矩平衡关系,建立电机运动方程:
8、
9、式中,f表示电机负载转矩;te表示电机电磁转矩;表示电机机械角加速度;j表示电机转动惯量;
10、12)建立液压系统模型;
11、假设主缸与轮缸制动压力一致,引入液压补偿项f(p)用于表征液压系统存在的液压时变不确定性扰动,最终构建的液压系统模型为:
12、
13、式中,表示主缸推杆速度;a表示主缸活塞有效面积;表示制动主缸实际压力变化率;p表示制动主缸实际压力;kc表示制动液体积弹性模量;vm表示主缸制动液体积;vw表示轮缸制动液体积;f(p)表示液压补偿项;x表示实际主缸推杆位移;
14、13)对静摩擦、库仑摩擦、粘性摩擦进行建模:
15、
16、式中,tf表示摩擦转矩;ρv表示黏性摩擦因数;ωm表示电机机械角速度;ρc表示库仑摩擦因数;tc表示系统空载时的库伦摩擦转矩;εn表示电机转速阈值;n表示齿轮传动比;h表示滚珠丝杠导程;ts表示静摩擦转矩。
17、进一步的,设计基于自适应径向基神经网络的液压控制器的具体方法如下:
18、211)令目标主缸推杆速度作为液压控制律,即将液压系统模型转化为
19、
20、
21、
22、式中,α表示液压系统模型第一参数;β表示液压系统模型第二参数;u表示液压控制律;
23、212)根据制动主缸目标压力p*与制动主缸实际压力p差值ep建立液压控制器滑模面:
24、sp=σ1ep+∫epdt
25、式中,sp表示液压控制器滑模面;σ1表示液压滑模控制器第一参数,且σ1>0;ep表示制动主缸目标压力与制动主缸实际压力差值;
26、213)对应的,求解液压控制器滑模面微分为:
27、
28、式中,表示液压控制器滑模面微分;表示制动主缸目标压力与制动主缸实际压力差值微分;表示制动主缸目标压力微分;
29、214)选用含有饱和函数的指数趋近律:
30、
31、
32、式中,c表示液压滑模控制器第二参数,且c>0;q表示液压滑模控制器第三参数,且q>0;sat(sp)表示包含函数;ξ表示饱和函数阈值;
33、215)将含有饱和函数的指数趋近律代入液压控制器滑模面微分中,化简得到液压控制律为:
34、
35、式中,sat(sp)表示包含函数;
36、216)使用径向基神经网络对其进行逼近拟合;将制动主缸实际压力作为网络输入,液压补偿项估计值作为网络输出;径向基神经网络算法设计为:
37、
38、
39、式中,表示液压补偿项估计值;wt表示估计网络权值;h(p)表示高斯基函数网络输出;cj表示网络隐含层第j个神经元高斯基函数中心值;bj为隐含层第j个神经元高斯基函数宽度;
40、217)液压补偿项理想值f(p)*表示为:
41、f(p)*=w*th(p)+εp
42、式中,f(p)*表示液压补偿项理想值;w*t表示理想网络权值;h(p)表示高斯基函数网络输出;εp表示网络逼近误差,且εp≤|t|,t表示有界边界实数;
43、218)设定理想网络权值和估计网络权值的差值为得到:
44、
45、式中,表示理想液压补偿项和估计液压补偿项的差值;表示理想网络权值和估计网络权值的差值;
46、219)将液压补偿项估计值入液压控制律中,建立新的液压控制律up:
47、
48、式中,up表示新的液压控制律;表示液压补偿项估计值;sat(sp)表示包含函数;sp表示液压控制器滑模面;
49、2110)将新的液压控制律up代入液压控制器滑模面微分,简化得到:
50、
51、2111)设计液压层李雅普诺夫函数得到微分形式为:
52、
53、式中,表示液压层李雅普诺夫函数微分;μ表示液压层李雅普诺夫函数系数;表示估计网络权值微分;
54、2112)根据李雅普诺夫直接法,设计径向基神经网络自适应律为:
55、
56、2113)进一步化简液压层李雅普诺夫函数微分形式:
57、
58、考虑到网络逼近误差εp≤|t|有界,因此选用时,能够使得液压层李雅普诺夫函数微分保证液压控制系闭环鲁棒;
59、最终,目标主缸推杆位移为:
60、x*=∫updt
61、式中,x*表示目标主缸推杆位移;up表示新的液压控制律。
62、进一步的,设计基于摩擦模型补偿的位置控制器的具体方法如下:
63、221)采用转角比例-积分控制建立目标电机机械角速度
64、
65、式中,表示目标电机机械角速度;kp表示位置控制比例增益;ki表示位置控制积分增益;x*表示目标主缸推杆位移;
66、222)在转速滑模控制中选用目标转矩轴电流作为控制输入,即随后建立转速系统状态变量方程为:
67、
68、式中,表示电机机械角加速度微分;j表示电机转动惯量;pn表示电机磁极对数;ψf表示电机转子磁链;表示转速滑模控制律微分;
69、223)设定目标电机机械角速度与实际电机机械角速度差值作为转速滑模跟踪误差,建立转速控制器滑模面:
70、
71、式中,σ2表示转速滑模控制器第一参数,且σ2>0;sω表示转速控制器滑模面;eω表示目标电机机械角速度与实际电机机械角速度差值;表示目标电机机械角速度与实际电机机械角速度差值微分;
72、224)选用指数趋近函数作为转速滑模趋近律:
73、
74、式中,sω表示转速控制器滑模面;表示转速控制器滑模面微分;k表示转速滑模控制器第二参数,且k>0;d表示转速滑模控制器第三参数,且d>0;sgn(sω)表示与转速相关的符号函数;
75、225)联立转速控制器滑模面、转速滑模趋近律和转速系统状态变量方程,得到电机转矩轴反馈电流为:
76、
77、式中,表示电机转矩轴反馈电流;us表示转速滑模控制律;k表示转速滑模控制器第二参数,且k>0;表示目标电机机械角速度与实际电机机械角速度差值微分;
78、226)在位置控制器中引入基于摩擦模型的电机转矩轴前馈补偿电流:
79、
80、式中:kt表示电机力矩系数;tf表示摩擦转矩;表示电机转矩轴前馈补偿电流;
81、227)最终,输出目标电机转矩轴电流为:
82、
83、式中,表示电机转矩轴前馈补偿电流;表示电机转矩轴反馈电流;表示目标电机转矩轴电流。
84、进一步的,设计基于李雅普诺夫理论的电流控制器的具体方法如下:
85、231)建立电流跟踪误差为:
86、
87、
88、式中,id表示实际电机励磁轴电流;iq表示实际电机励转矩轴电流;表示目标电机励磁轴电流,且设定表示目标电机转矩轴电流;ed表示目标电机励磁轴电流和实际电机励磁轴电流的差值;eq表示目标电机转矩轴电流和实际电机转矩轴电流的差值;
89、232)对应的电流跟踪误差微分为:
90、
91、
92、式中,表示目标电机励磁轴电流和实际电机励磁轴电流的差值微分;表示目标电机转矩轴电流和实际电机转矩轴电流的差值微分;ud表示电机励磁轴电压;uq表示电机转矩轴电压;r为电机定子电阻;ld表示电机励磁轴电感;lq表示电机转矩轴电感;ψf表示电机转子磁链;ωe表示电机电角速度;
93、233)定义电机励磁轴电流控制器李雅普诺夫函数为定义电机转矩轴电流控制器李雅普诺夫函数为得到微分形式为:
94、
95、
96、式中,表示电机励磁轴电流控制器李雅普诺夫函数微分;表示电机转矩轴电流控制器李雅普诺夫函数微分;
97、234)根据李雅普诺夫直接法,设计电机励磁轴电流控制律和电机转矩轴电流控制律为:
98、
99、
100、式中,表示电机励磁轴电流控制律;表示电机转矩轴电流控制律;γ1表示电机励磁轴控制参数,且设定γ1>-r/ld;γ1表示电机转矩轴控制参数,且设定γ2>-r/lq。
101、本发明有益效果为:
102、1)本发明采用自适应径向基函数神经网络和鲁棒滑模理论,设计了电子助力制动系统液压控制器,解决了液压时变不确定性扰动问题
103、2)本发明采用摩擦前馈补偿和滑模控制理论,设计了电子助力制动系统位置控制器,克服了机构内部显著的静摩擦、库仑摩擦与粘性摩擦等非线性摩擦阻碍干扰;
104、3)本发明采用李雅普诺夫理论,设计了电子助力制动系统电流控制器,解决了永磁同步电机高速转动过程中存在的电机电磁轴和转矩轴电磁特性动态耦合问题。
本文地址:https://www.jishuxx.com/zhuanli/20240914/294435.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。