一种基于FPGA和特征模型的多通道高速高精度伺服控制芯片的制作方法
- 国知局
- 2024-09-14 15:09:23
本发明属于永磁同步电机驱动控制,特别是一种基于fpga和特征模型的多通道高速高精度伺服控制芯片。
背景技术:
1、在现代工业和制造业中,诸如工业机器人、自动化生产线、无人驾驶车辆等系统都依赖于高精度和高响应速度的伺服控制系统。为了应对多样化和复杂的控制需求,系统必须能够实时处理多通道的数据,并且在瞬时响应时保持高精度。这对伺服控制系统的处理能力、灵活性和稳定性提出了极高的要求。此外,随着工业现场的多变性和复杂性增加,控制系统不仅需要在动态环境中保持精确的控制,还要能够自适应地调整其参数以应对不断变化的工作条件和负载。
2、当前的研究主要集中在提升系统的实时数据处理能力、增强自适应控制能力以及提高控制精度与稳定性上。这些研究的核心目标是开发出能够满足复杂工业应用需求的伺服控制系统。首先,系统需要具备强大的实时数据处理能力,以应对多通道和高频信号的并行处理。其次,自适应控制能力是系统在变化的负载和工作条件下保持高性能控制的关键,即在运行过程中能够动态调整控制参数。此外,在精密制造和高精度定位等应用场景中,系统必须提供高度精确和稳定的控制,以确保实现预期的性能指标。
3、现有的伺服控制系统主要依赖于数字信号处理器(dsp)或微控制器(mcu)进行控制。虽然这些传统技术在某些应用场景下表现良好,但在应对多通道、高速高精度控制时,存在显著的不足之处。首先,dsp和mcu在处理大量并行数据时受到其串行处理架构的限制,难以实现实时的多通道高速数据处理,这导致系统在复杂控制场景中性能受限。此外,传统控制系统普遍缺乏在运行过程中动态调整控制参数的能力,无法有效应对不断变化的工作环境和负载,从而在自适应控制能力上显得不足。更重要的是,由于硬件资源和处理速度的限制,现有的伺服控制系统在高精度和快速响应需求的场景中,常常不能达到预期的控制精度和稳定性。面对复杂的控制需求,现有系统通常需要额外的硬件或软件资源,这不仅增加了系统的复杂性,还降低了其灵活性。因此,现有技术在处理能力、自适应能力、精度和系统复杂性方面存在显著的局限性,这催生了对更加高效、精确和灵活的伺服控制系统的需求。
4、开发一种能够集成高效处理、高精度控制和自适应调节能力的新型伺服控制芯片,成为了提升现代工业控制系统性能的关键。fpga(现场可编程门阵列)因其并行处理能力和高度可编程性,逐渐成为解决这些问题的理想选择,能够在复杂工业环境中提供更优的控制解决方案。
技术实现思路
1、本发明的目的在于针对上述现有技术存在的高速高精度伺服系统开发周期长、开发成本高等问题,提供一种基于fpga和特征模型的多通道高速高精度伺服控制芯片,旨在有效降低高性能伺服系统的开发周期和成本,并提升其在工业自动化、精密仪器、电动汽车和航空航天等领域的应用性能。
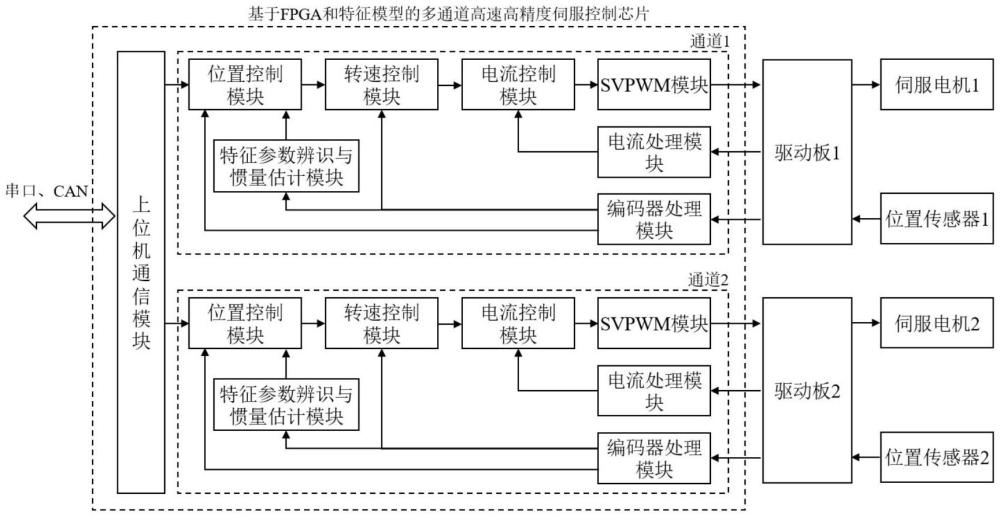
2、实现本发明目的的技术解决方案为:基于fpga和特征模型的多通道高速高精度伺服控制芯片,所述芯片包括通过fpga实现的一个上位机通信模块及多个电机控制通道,每个所述电机控制通道包括特征参数辨识与惯量估计模块、位置控制模块、转速控制模块、电流控制模块、svpwm模块、电流处理模块和编码器处理模块;
3、所述上位机通信模块,用于接收来自上位机的控制指令和参数配置,并将控制指令传输给各个所述电机控制通道,还用于向所述上位机返回伺服系统的运行状态信息;
4、所述电流处理模块,用于接收电机的实时电流信号且对其进行滤波处理,并将滤波后的信号传递给所述电流控制模块和特征参数辨识与惯量估计模块;
5、所述编码器处理模块,用于接收电机编码器的信号,计算电机转子的实际位置和速度,并将处理后的反馈信号传递给所述特征参数辨识与惯量估计模块、位置控制模块和转速控制模块;
6、所述特征参数辨识与惯量估计模块,用于对电机模型的特征参数进行在线辨识,同时实时估计电机的转动惯量;
7、所述位置控制模块,用于根据所述上位机和特征参数辨识与惯量估计模块的输出,对电机的目标位置进行控制,并将控制信号传递给所述转速控制模块;
8、所述转速控制模块,用于根据所述位置控制模块输出的位置误差和所述编码器处理模块输出的速度指令信号,调节电机的转速以使电机按照期望的速度运行,并将调节后的信号传递给所述电流控制模块;
9、所述电流控制模块,用于根据所述转速控制模块输出的速度控制信号和所述电流处理模块输出的电流反馈信号,调整电流输出以维持电机的稳定运行,并输出到所述svpwm模块;
10、所述svpwm模块即空间矢量脉宽调制模块,用于接收所述电流控制模块输出的电流控制信号,将电流控制信号转换为空间矢量脉宽调制信号,并输出svpwm信号到电机驱动电路以驱动电机。
11、进一步地,所述电流处理模块通过自适应滤波器对采集到的电流值进行滤波。
12、进一步地,所述通过自适应滤波器对采集到的电流值进行滤波,具体为:通过自适应fir滤波器对采集到的相电流滤波,具体包括:
13、步骤3-1,采集输入信号并计算误差:
14、e(n)=d(n)-y(n)
15、其中,d(n)为期望输出的信号,y(n)为滤波器在n时刻的实际输出,e(n)为n时刻的系统误差;
16、步骤3-2,计算滤波器的输出:
17、
18、其中,wk(n)为n时刻滤波器的第k个滤波器系数,v2(n-k)为输入信号在n-k时刻的值,m为滤波器的阶数,y(n)为n时刻滤波器的输出;
19、步骤3-3,更新滤波器系数,更新公式为:
20、wk(n+1)=wk(n)+2μe(n)v2(n-k)
21、其中,wk(n+1)为n+1时刻时第k个滤波器系数,μ为步长因子;
22、自适应fir滤波器的目标是最小化均方误差,表达式为:
23、e[e2(n)]=e{[d(n)-y(n)]2}
24、式中,e[*]表示均方;
25、通过不断调整滤波器系数,实现所述目标。
26、进一步地,所述svpwm模块通过fpga的逻辑控制功能,生成svpwm信号。
27、进一步地,所述特征参数辨识与惯量估计模块采用模型参考自适应算法对转动惯量进行实时估计,以适应不同的负载条件。
28、进一步地,所述位置控制模块采用基于特征模型的自适应离散滑模控制器对电机的目标位置进行控制。通过计算跟踪误差和控制误差面,利用滑模控制算法生成控制信号,以精确调整电机的位置,确保其按设定的轨迹运动。
29、进一步地,所述上位机采用can或串口的方式与所述芯片通信。
30、进一步地,所述编码器处理模块通过fpga的i/o接口采集电机编码器的脉冲信号。
31、本发明与现有技术相比,其显著优点为:
32、(1)利用fpga的并行处理能力和高频信号处理能力,使得系统能够在高频率下高效执行复杂的控制算法,大幅提升系统的响应速度和控制精度。
33、(2)通过在单一芯片上集成多通道控制功能,简化了系统的设计和部署,提高了系统的集成度和可靠性。
34、(3)通过特征模型的在线辨识和自适应控制算法,系统能够动态适应不同的工作环境和负载变化,提高了控制的稳定性和精度。
35、(4)模块化的设计使得系统具有良好的可扩展性和维护性,方便进行功能扩展和升级。
36、(5)本发明方案有高性能和高精度、高度集成和灵活性、实时响应和自适应能力、模块化设计等优势,适用于各种高要求的工业控制应用,具有广泛的应用前景和市场潜力。
37、(6)本发明通过将伺服系统高精度控制算法设计成专用芯片,仅需少量外围电路即可完成高速高精度伺服控制系统的开发。
38、下面结合附图对本发明作进一步详细描述。
本文地址:https://www.jishuxx.com/zhuanli/20240914/297167.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表