真空无工质推进器的制作方法
- 国知局
- 2024-10-15 10:15:12
本发明涉及航天推进器,特别涉及真空无工质推进器。
背景技术:
1、火箭发动机需要消耗燃料,在太空中航行火箭有限的燃料总有一天会耗尽,为了在太空中自由航行而不需要担心燃料问题,我利用陀螺仪的稳定性和进动性,做了一个叫陀螺进动推进器(申请号2024106835978)的发明专利,但是我对它的缺点不太满意,所以又做了本发明。
技术实现思路
1、本发明所要解决的技术问题是提供真空无工质推进器,通过基座(10)和连杆(8)在圆形空腔(2)内旋转运动,使推进器本体(1)在左侧阶段(14)和右侧阶段(15)位移的距离产生大小差异,就可以使推进器本体(1)推动航天器在宇宙中持续飞行。
2、为实现上述目的,本发明提供以下的技术方案:
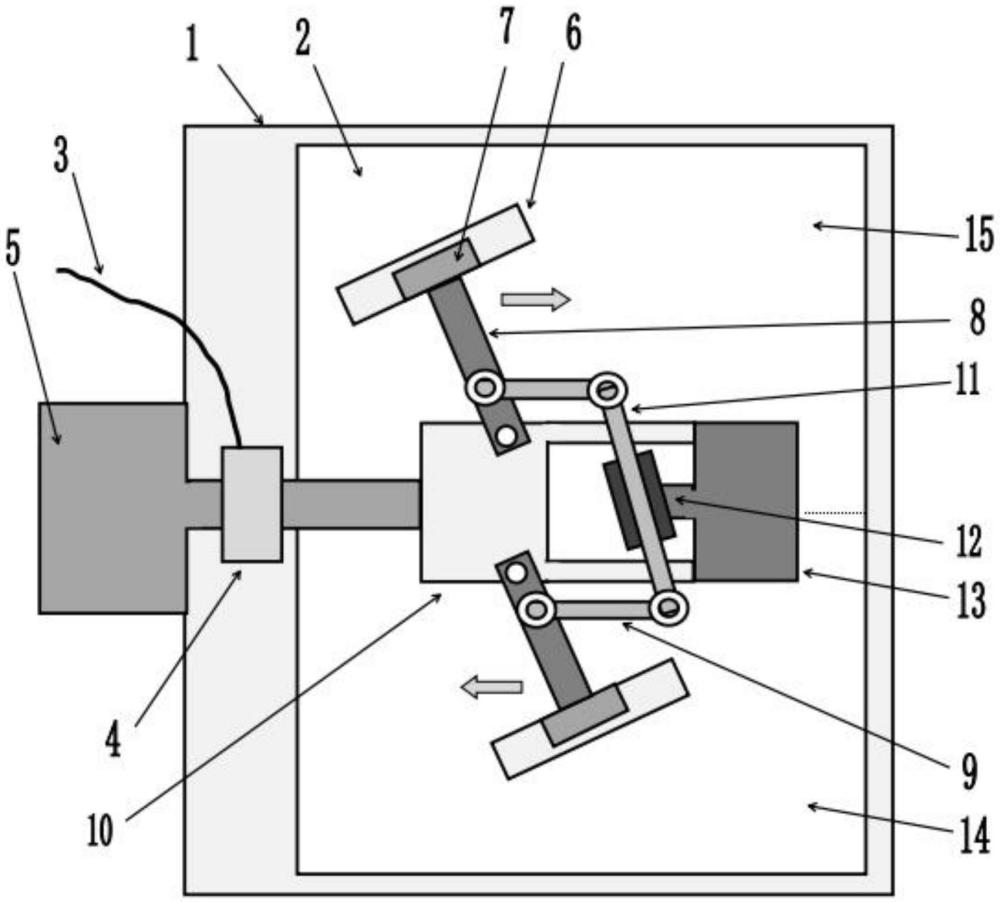
3、真空无工质推进器,其特征在于:所述真空无工质推进器包括一个在真空失重状态下静止的推进器本体(1),所述推进器本体(1)内部有2个圆形空腔(2),所述推进器本体(1)后部装有主电机(5),所述主电机(5)输出轴上装有导电滑环(4),所述主电机(5)输出轴末端与基座(10)相连接,所述基座(10)上装有多个连杆(8),所述连杆(8)末端装有飞轮电机(7),所述飞轮电机(7)外侧装有飞轮(6),所述基座(10)一端设置有固定支柱(16),所述固定支柱(16)上装有摇摆驱动电机(13),所述摇摆驱动电机(13)输出轴上装有主斜盘(12),所述主斜盘(12)外侧装有摇摆斜盘(11),所述摇摆斜盘(11)上装有多个摇摆连杆(9),所述摇摆连杆(9)与连杆(8)相连接,所述导线(3)通过导电滑环(4)后,固定于基座(10)和连杆(8)的外表面,连通飞轮电机(7)和摇摆驱动电机(13)为其提供供电和传输控制信号,所述左侧阶段(14)和右侧阶段(15)这2个阶段组成一个循环。
4、为了便于消除扭矩,所述2个圆形空腔(2)内的基座(10)和连杆(8)对向旋转。
5、为了让连杆(8)和飞轮(6)在左侧阶段(14)和右侧阶段(15)都向上进动,所述连杆(8)和飞轮(6)在左侧阶段(14)和右侧阶段(15)的运动方向相反。
6、为了使产生的推力保持向上的方向,所述主电机(5)和摇摆驱动电机(13)的转速相同,但方向相反,以便左侧阶段(14)和右侧阶段(15)保持固定的位置。
7、为了使连杆(8)和飞轮(6)的运动轨迹和基座(10)的旋转面有一定夹角,所述连杆(8)和飞轮(6)的运动轨迹和基座(10)的旋转面不在同一平面上。
8、为了使推进器本体(1)在右侧阶段(15)向上位移较大的距离,所述连杆(8)和飞轮(6)在右侧阶段(15)被摇摆连杆(9)带动向摇摆驱动电机(13)一端运动,使连杆(8)和飞轮(6)向上进动,此时向上进动的方向与基座(10)和连杆(8)在右侧阶段(15)向下运动的方向相反,基座(10)和连杆(8)从上到下运动时,会加速连杆(8)和飞轮(6)向摇摆驱动电机(13)一端运动,对其加速需要较大的力,同时推进器本体(1)获得一个较大的向上的反作用力。
9、为了使推进器本体(1)在左侧阶段(14)向下位移较小的距离,所述连杆(8)和飞轮(6)在左侧阶段(14)被摇摆连杆(9)带动向主电机(5)一端运动,使连杆(8)和飞轮(6)向上进动,此时向上进动的方向与基座(10)和连杆(8)在左侧阶段(14)向上运动的方向相同,基座(10)和连杆(8)从下到上运动时,会减慢连杆(8)和飞轮(6)向主电机(5)一端运动的速度,对其减速需要较小的力,同时推进器本体(1)获得一个较小的向下的反作用力。
10、为了使摇摆连杆(9)带动连杆(8)和飞轮(6)前后移动,所述摇摆驱动电机(13)带动主斜盘(12)旋转,使摇摆斜盘(11)带动摇摆连杆(9)前后摆动。
11、为了调整推进器本体(1)运动的方向和转向,通过调整所述摇摆驱动电机(13)的转速,改变左侧阶段(14)和右侧阶段(15)出现的位置。
12、为了防止摇摆斜盘(11)跟随主斜盘(12)一起转动和减小摩擦,所述固定支柱(16)安装在基座(10)上,且与摇摆斜盘(11)接触面装有轴承。
13、采用以上技术方案的有益效果是:不需要消耗燃料,通过基座(10)和连杆(8)在左侧阶段(14)和右侧阶段(15)的旋转运动,就可以使推进器本体(1)推动航天器在宇宙中持续飞行。
技术特征:1.真空无工质推进器,其特征在于:所述真空无工质推进器包括一个在真空失重状态下静止的推进器本体(1),所述推进器本体(1)内部有2个圆形空腔(2),所述推进器本体(1)后部装有主电机(5),所述主电机(5)输出轴上装有导电滑环(4),所述主电机(5)输出轴末端与基座(10)相连接,所述基座(10)上装有多个连杆(8),所述连杆(8)末端装有飞轮电机(7),所述飞轮电机(7)外侧装有飞轮(6),所述基座(10)一端设置有固定支柱(16),所述固定支柱(16)上装有摇摆驱动电机(13),所述摇摆驱动电机(13)输出轴上装有主斜盘(12),所述主斜盘(12)外侧装有摇摆斜盘(11),所述摇摆斜盘(11)上装有多个摇摆连杆(9),所述摇摆连杆(9)与连杆(8)相连接,所述导线(3)通过导电滑环(4)后,固定于基座(10)和连杆(8)的外表面,连通飞轮电机(7)和摇摆驱动电机(13)为其提供供电和传输控制信号,所述左侧阶段(14)和右侧阶段(15)这2个阶段组成一个循环。
2.根据权利要求1所述圆形空腔(2),其特征在于:所述2个圆形空腔(2)内的基座(10)和连杆(8)对向旋转,以抵消扭矩。
3.根据权利要求1所述连杆(8)和飞轮(6),其特征在于:所述连杆(8)和飞轮(6)在左侧阶段(14)和右侧阶段(15)的运动方向相反,以便连杆(8)和飞轮(6)在左侧阶段(14)和右侧阶段(15)都向上进动。
4.根据权利要求1所述主电机(5)和摇摆驱动电机(13),其特征在于:所述主电机(5)和摇摆驱动电机(13)的转速相同,但方向相反,以便左侧阶段(14)和右侧阶段(15)保持固定的位置,使产生的推力保持向上的方向。
5.根据权利要求1所述连杆(8)和飞轮(6),其特征在于:所述连杆(8)和飞轮(6)的运动轨迹和基座(10)的旋转面不在同一平面上,有一定夹角。
6.根据权利要求1所述右侧阶段(15),其特征在于:所述连杆(8)和飞轮(6)在右侧阶段(15)被摇摆连杆(9)带动向摇摆驱动电机(13)一端运动,使连杆(8)和飞轮(6)向上进动,此时向上进动的方向与基座(10)和连杆(8)在右侧阶段(15)向下运动的方向相反,基座(10)和连杆(8)从上到下运动时,会加速连杆(8)和飞轮(6)向摇摆驱动电机(13)一端运动,对其加速需要较大的力,同时推进器本体(1)获得一个较大的向上的反作用力,使推进器本体(1)在右侧阶段(15)向上位移较大的距离。
7.根据权利要求1所述左侧阶段(14),其特征在于:所述连杆(8)和飞轮(6)在左侧阶段(14)被摇摆连杆(9)带动向主电机(5)一端运动,使连杆(8)和飞轮(6)向上进动,此时向上进动的方向与基座(10)和连杆(8)在左侧阶段(14)向上运动的方向相同,基座(10)和连杆(8)从下到上运动时,会减慢连杆(8)和飞轮(6)向主电机(5)一端运动的速度,对其减速需要较小的力,同时推进器本体(1)获得一个较小的向下的反作用力,使推进器本体(1)在左侧阶段(14)向下位移较小的距离。
8.根据权利要求1所述主斜盘(12)和摇摆斜盘(11),其特征在于:所述摇摆驱动电机(13)带动主斜盘(12)旋转,使摇摆斜盘(11)通过摇摆连杆(9)带动连杆(8)和飞轮(6)前后移动。
9.根据权利要求1所述主电机(5)和摇摆驱动电机(13),其特征在于:通过调整所述摇摆驱动电机(13)的转速,改变左侧阶段(14)和右侧阶段(15)出现的位置,从而调整推进器本体(1)运动的方向和转向。
10.根据权利要求1所述固定支柱(16),其特征在于:所述固定支柱(16)安装在基座(10)上,且与摇摆斜盘(11)接触面装有轴承,防止摇摆斜盘(11)跟随主斜盘(12)一起转动和减小摩擦。
技术总结本发明公开了真空无工质推进器,涉及航天推进器技术领域。该真空无工质推进器有效解决了现有火箭发动机不适合在宇宙中持续航行和燃料耗尽的问题。本发明的思路是利用陀螺仪的稳定性和进动性,利用飞轮在左侧阶段和右侧阶段的左右移动,使飞轮在左侧阶段和右侧阶段都向上进动,这样当主电机带动基座、连杆、飞轮一起旋转时,在左侧阶段和右侧阶段所需要的力是不一样的,推进器本体会随着主电机的旋转不断的向上运动,从而使推进器本体推动航天器在真空的宇宙环境中持续飞行。技术研发人员:张敬受保护的技术使用者:张敬技术研发日:技术公布日:2024/10/10本文地址:https://www.jishuxx.com/zhuanli/20241015/316966.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表