采用形状记忆合金驱动的爬壁机器人
- 国知局
- 2024-10-21 15:11:00
本发明涉及微型机器人,具体是一种采用形状记忆合金驱动的爬壁机器人,特别是在应用于航空发动机或燃气轮机进行结构损伤检测时,爬壁机器人的尺寸可以做到昆虫级尺寸。
背景技术:
1、现有昆虫尺寸(一般来说尺寸约5cm以下)微型爬壁机器人采用液晶弹性体(aces)、微型减速电机与压电驱动器驱动。其中,液晶弹性体的工作原理主要是基于从有序到无序的相转变。这种相变可以由外部刺激如热或电信号触发,导致材料形状的改变,而采用液晶弹性体驱动可以实现机身大角度变形,通过前后两个静电吸盘交替通断实现类尺蠖步态,从而达到壁面爬行的目的;采用减速电机驱动需要配置减速箱或者传动装置,通过静电履带吸附或者仿生吸附实现减速电机转动时对壁面的可靠吸附,最终实现壁面的吸附运动;采用压电驱动器驱动时,将八个驱动器分别控制四条腿(每两个驱动器控制一条腿),实现每条腿的两自由度运动,每条腿上的静电吸盘对壁面进行吸附,通过对四条腿交替三角步态的精确控制,实现壁面上的爬行运动。
2、而使用昆虫尺寸微型机器人对航空发动机或燃气轮机进行结构损伤检测对于提高检测效率和可检范围具有重要意义。随着对爬壁机器人尺寸微型化、载荷能力与工作可靠性的要求不断提高,采用液晶弹性体驱动可实现机身大变形,但是由于机身刚性低,载荷将对机身产生较大变形,使机器人无法正常工作;而采用微型减速电机由于需要减速箱与传动装置,尺寸的进一步微型化面临较大困难,且微型电机的微型化导致效率极低且发热严重;采用压电驱动器需要对八个驱动器进行精确控制以实现交替三角步态,故对控制的要求较高,且驱动器数量较多,系统的复杂,导致可靠性相对较低。
技术实现思路
1、本发明专利的目的在于设计一种结构可靠性高、能进一步微型化、具有较大驱动力的微型爬壁机器人动力系统。采用记忆合金丝驱动具有易于微型化、驱动力大、可靠性高的优势,并且已经实现了采用记忆合金丝驱动、静电吸盘吸附的类尺蠖步态,成功沿竖直平面吸附爬行。
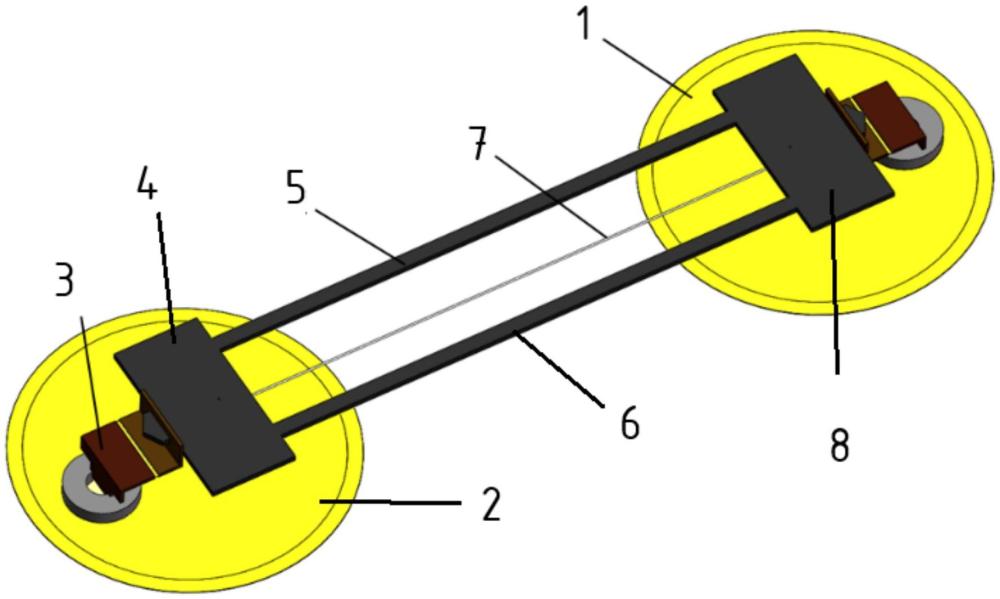
2、采用形状记忆合金驱动的爬壁机器人,其特征在于,包括:吸附组件,其至少包括第一吸附单元和第二吸附单元;弹性元件,弹性元件包括第一端部连接座和第二端部连接座及位于第一端部连接座和第二端部连接座之间的弹性本体;形状记忆合金丝,其被设置为加热状态下产生收缩,冷却状态下恢复为原长;其中,第一吸附单元和第二附单元分别固定在弹性元件的第一端部连接座和第二端部连接座上,并且朝向相同,均朝向墙壁;形状记忆合金丝沿着弹性本体设置且两端也分别固定在弹性元件的第一端部连接座和第二端部连接座上,在形状记忆合金丝加热时,弹性本体因形状记忆合金丝的收缩变形而从初始状态进入弯曲状态,第一吸附单元和第二吸附单元之间的距离减少;在形状记忆合金丝冷却时;弹性本体因形状记忆合金丝的恢复原状也回复到初始状态。在本技术方案中,由于通过记忆合金丝与弹性元件联用,从而产生类尺蠖的弯曲-伸直运动用于爬壁机器人,该结构简单,质量轻便,非常易于微型化。
3、优选的是,吸附组件具体为静电吸盘组件,第一吸附单元为第一静电吸盘,第二吸附单元为第二静电吸盘。
4、优选的是,静电吸盘组件为三层材料堆叠后键合而成,最外面两层为高介电常数的高分子薄膜材料,中间层为导电材料层。
5、优选的是,弹性元件为弹性板,弹性本体为板形结构,第一端部连接座和第二端部连接座位于弹性本体长度方向的两端。
6、优选的是,还包括柔性脚踝,其中,柔性脚踝包括铰链结构,第一吸附单元和第二附单元分别通过柔性脚踝固定在弹性元件的第一端部连接座和第二端部连接座上。
7、优选的是,柔性脚踝的铰链结构是通过对多层复合材料经激光切割后形成的。
8、优选的是,爬壁机器人为昆虫尺寸的机器人。
9、发明有益效果:
10、1)本发明的爬壁机器人通过将记忆合金丝与弹性元件结合,实现类尺蠖的收缩-伸长运动,该结构简单,质量轻便,非常易于微型化,爬壁机器人尺寸可以做成昆虫级。
11、2)当吸附组件为静电吸附组件时,通过将记忆合金丝驱动与静电吸附结合的形成了爬行构型的创新,使整机质量保持更轻的同时,爬行驱动力更大,并整机与壁面之间的静电吸附力可以通过改变输入电压进行调节。
12、3)爬行机器人由于采用柔性脚踝实现驱动结构与吸附结构之间的柔性连接,可以适用于各种复杂的墙面的爬行。
13、4)本发明实现了采用记忆合金丝驱动、静电吸盘吸附的类尺蠖步态,并成功沿竖直平面吸附爬行,通入的吸附电压450v,记忆合金丝加热驱动电流0.12a,整机质量15mg。本发明经过结构优化和创新设计实现了昆虫尺寸微型爬行机器人沿垂直壁面吸附爬行。
14、本发明的其他有益效果将在后面具体实施例中逐一描述。
技术特征:1.采用形状记忆合金驱动的爬壁机器人,其特征在于,包括:
2.根据权利要求1所述的采用形状记忆合金驱动的爬壁机器人,其特征在于:吸附组件具体为静电吸盘组件,第一吸附单元为第一静电吸盘(1),第二吸附单元为第二静电吸盘(2)。
3.根据权利要求2所述的采用形状记忆合金驱动的爬壁机器人,其特征在于:静电吸盘组件为三层材料堆叠后键合而成,最外面两层为高介电常数的高分子薄膜材料,中间层为导电材料层。
4.根据权利要求1所述的采用形状记忆合金驱动的爬壁机器人,其特征在于:弹性元件为弹性板,弹性本体为板形结构,第一端部连接座(8)和第二端部连接座(4)位于弹性本体长度方向的两端。
5.根据权利要求1所述的采用形状记忆合金驱动的爬壁机器人,其特征在于,还包括柔性脚踝,其中,柔性脚踝包括铰接结构,第一吸附单元和第二附单元分别通过柔性脚踝固定在弹性元件的第一端部连接座(8)和第二端部连接座(4)上。
6.根据权利要求1所述的采用形状记忆合金驱动的爬壁机器人,其特征在于,柔性脚踝的铰链结构是通过对多层复合材料经激光切割后形成的。
7.根据权利要求1-5任一项所述的采用形状记忆合金驱动的爬壁机器人,其特征在于,爬壁机器人为昆虫尺寸的机器人。
技术总结本发明涉及一种采用形状记忆合金驱动的爬壁机器人,其具有吸附组件,并使用了在加热状态下收缩、在冷却状态下可被拉伸至原长的形状记忆合金丝,将弹性元件与记忆合金丝结合从而得到了能实现类尺蠖运动的壁面吸附爬行机器人,该爬行机器人结构非常简单,质量轻便,非常易于微型化,其可以适用于更加复杂的墙体表面,跨越不利于爬行的区域,从而能够应用于更加严苛的工作环境。技术研发人员:闫晓军,喻贤,刘志伟,漆明净,冷佳明受保护的技术使用者:北京航空航天大学技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/320764.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表