一种车辆行走控制方法、车辆控制器和车辆与流程
- 国知局
- 2024-11-06 14:44:03
本申请涉及电动工程车辆,具体涉及一种车辆行走控制方法、车辆控制器和车辆。
背景技术:
1、目前,电动工程机械车辆对于行走控制普遍采用扭矩控制,通过动态扭矩控制技术能够根据负载变化实时调整电机输出扭矩,以实现高效节能和精确操控。
2、装载机是一种用于铲装、搬运和短途运输散装物料的重型机械,装载机在一档高速运行时,当遇到颠簸路面时,车身容易发生抖动,此时采用转矩控制车辆的稳定性差。
3、因此,急需一种车辆行走控制方法,以在车身发生抖动时,采用转速控制车辆,提高车辆行走的稳定性。
技术实现思路
1、本申请实施例提供了一种车辆行走控制方法、车辆控制器及车辆,以提高车辆在行走过程中的稳定性。
2、根据本申请实施例的第一方面,提供了一种车辆行走控制方法,方法包括:
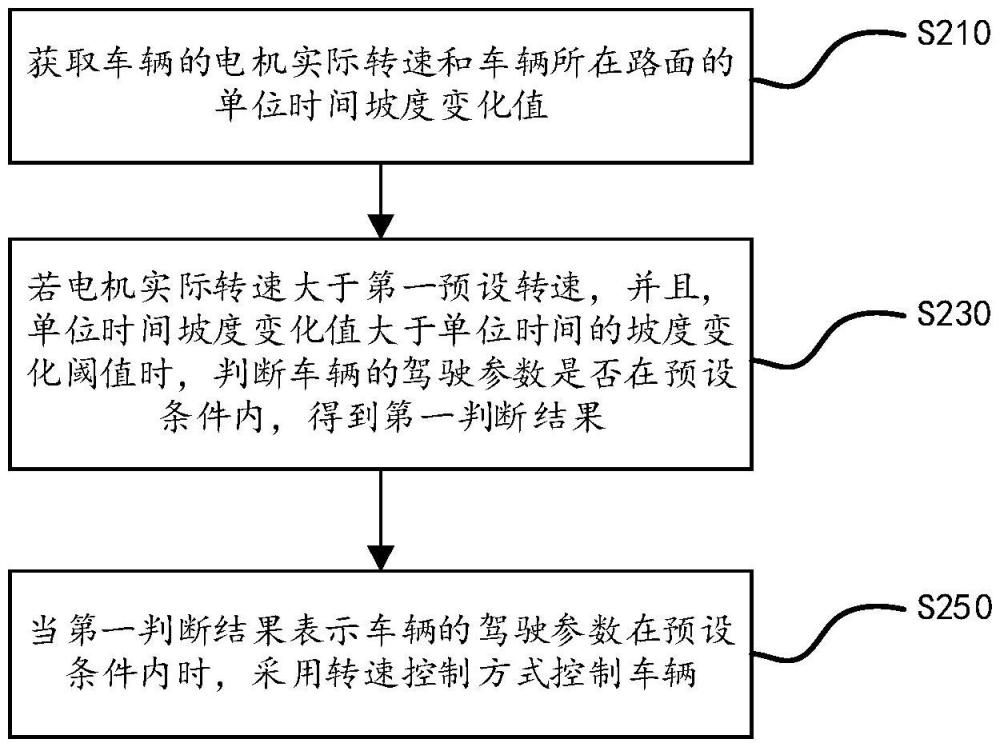
3、获取车辆的电机实际转速和车辆所在路面的单位时间坡度变化值;单位时间坡度变化值用于表示路面颠簸情况对电机的转速的影响程度;
4、若电机实际转速大于第一预设转速,并且,单位时间坡度变化值大于单位时间的坡度变化阈值时,
5、判断车辆的驾驶参数是否在预设条件内,得到第一判断结果;
6、当第一判断结果表示车辆的驾驶参数在预设条件内时,采用转速控制方式控制车辆。
7、在一个实施例中,驾驶参数包括加速踏板开度,判断车辆的驾驶参数是否在预设条件内,得到第一判断结果,包括:
8、判断车辆的加速踏板开度是否大于第一预设开度阈值,得到第二判断结果;
9、当第二判断结果表示加速踏板开度大于第一预设开度阈值时,驾驶参数在预设条件内。
10、在一个实施例中,驾驶参数包括电池荷电状态soc,判断车辆的驾驶参数是否在预设条件内,得到第一判断结果,包括:
11、判断车辆的soc是否在第一预设电池荷电状态区间内,得到第三判断结果;
12、当第三判断结果表示车辆的soc在第一预设电池荷电状态区间内时,驾驶参数在预设条件内。
13、在一个实施例中,驾驶参数包括车辆所在路面的坡度值,判断车辆的驾驶参数是否在预设条件内,得到第一判断结果,包括:
14、判断坡度值是否在预设坡度区间内,得到第四判断结果;
15、当第四判断结果表示坡度值在预设坡度区间内时,驾驶参数在预设条件内。
16、在一个实施例中,采用转速控制方式控制车辆,包括:
17、发送转速控制信号和目标转速至微控制器单元mcu。
18、在一个实施例中,驾驶参数包括加速踏板开度和电池荷电状态soc,方法还包括:若电机实际转速小于第二预设转速时,判断加速踏板开度是否小于第二预设开度阈值,得到第五判断结果;判断soc是否小于第二预设电池荷电状态值,得到第六判断结果;
19、当第四判断结果表示否,或者第五判断结果或者第六判断结果表示是时,采用转矩控制方式控制车辆。
20、在一个实施例中,采用转矩控制方式控制车辆,包括:
21、发送转矩控制信号和需求转速至mcu。
22、根据本申请实施例的第二方面,提供了一种车辆控制器,车辆控制器包括存储器和处理器;
23、所述存储器与所述处理器连接,用于存储程序;
24、所述处理器用于通过运行所述存储器中的程序,实现如第一方面或第一方面任一实施例的车辆行走控制方法。
25、根据本申请实施例的第三方面,提供了一种车辆,车辆包括第二方面的车辆控制器。
26、本申请实施例提供的车辆行走控制方法,通过获取车辆的电机实际转速和车辆所在路面的单位时间坡度变化值,若车辆电机实际转速大于第一预设转速,并且单位时间坡度变化值大于单位时间的坡度变化阈值时,判断车辆的驾驶参数是否在预设条件内,得到第一判断结果,在第一判断结果表示车辆的驾驶参数在预设条件内时,采用转速控制方式控制车辆。本申请实施例中的车辆行走控制方法,能够在车辆的转速较高且路况较差时,采用转速控制,避免由于车辆转速变化带来的波动,提高车辆行走的稳定性。
技术特征:1.一种车辆行走控制方法,其特征在于,包括:
2.根据权利要求1所述的车辆行走控制方法,其特征在于,所述驾驶参数包括加速踏板开度,所述判断所述车辆的驾驶参数是否在预设条件内,得到第一判断结果,包括:
3.根据权利要求1所述的车辆行走控制方法,其特征在于,所述驾驶参数包括电池荷电状态soc,
4.根据权利要求1所述的车辆行走控制方法,其特征在于,
5.根据权利要求1至4任一项所述的车辆行走控制方法,其特征在于,所述采用转速控制方式控制所述车辆,包括:
6.根据权利要求4所述的车辆行走控制方法,其特征在于,所述驾驶参数包括加速踏板开度和电池荷电状态soc,所述方法还包括:
7.根据权利要求6所述的车辆行走控制方法,其特征在于,所述采用转矩控制方式控制所述车辆,包括:
8.一种车辆控制器,其特征在于,包括存储器和处理器;
9.一种车辆,其特征在于,所述车辆包括权利要求8所述的车辆控制器。
技术总结本申请实施例提供一种车辆行走控制方法、车辆控制器和车辆,方法包括:获取车辆的电机实际转速和车辆所在路面的单位时间坡度变化值;单位时间坡度变化值用于表示路面颠簸情况对电机的转速的影响程度;若电机实际转速大于第一预设转速,并且,单位时间坡度变化值大于单位时间的坡度变化阈值时,判断车辆的驾驶参数是否在预设条件内,得到第一判断结果;当第一判断结果表示车辆的驾驶参数在预设条件内时,采用转速控制方式控制车辆。本申请实施例提供的车辆行走控制方法能够提高车辆行走的稳定性。技术研发人员:明巧红,马东一,朱世强受保护的技术使用者:湖州三一装载机有限公司技术研发日:技术公布日:2024/11/4本文地址:https://www.jishuxx.com/zhuanli/20241106/323829.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表