一种基于无人机的玫瑰花摘取装置的制作方法
- 国知局
- 2024-11-19 10:01:39
本发明涉及一种基于无人机的玫瑰花摘取装置,具体地说涉及了一种利用无人机搭载高度平衡调节装置、采摘装置、收集装置和视觉模块的采摘玫瑰花设备,属于农业机械领域。
背景技术:
1、玫瑰花作为一种重要的观赏类花卉和经济类作物,在园艺、农业及景观设计等领域有着广泛的应用。然而,传统的玫瑰花摘取方式主要依赖人工劳动,人工劳动存在着劳动强度大、效率低下、用工成本高等问题,尤其在大规模玫瑰花种植园中,用工成本占据了相当大的比例。因此,玫瑰花摘取装置的设计多为地面机械,其只适用于标准化种植园,无法做到全场景采摘,国内玫瑰花种植园的玫瑰花行距多变,无法保证路面采摘机械完成采摘工作,因此伴随着无人机技术的发展,采用无人机搭载采摘装置可以克服地形,密度等环境因素,可以有效提高采摘玫瑰花效率和降低成本。
技术实现思路
1、针对地面玫瑰花采摘机械难以作业的问题,本发明提供了一种基于无人机的玫瑰花摘取装置。
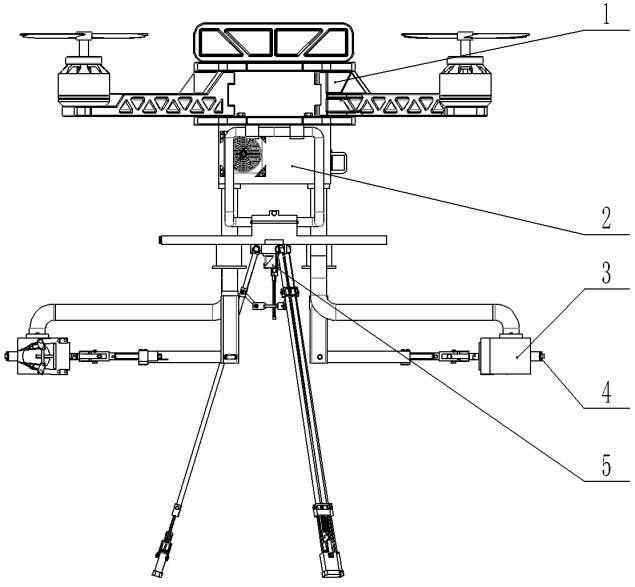
2、本发明是通过以下技术方案实现的:一种基于无人机的玫瑰花摘取装置,是由无人机装置、高度平衡调节装置、采摘装置、收集装置和视觉识别模块组成的,所述的无人机装置下端通过螺栓连接收集装置,所述的高度平衡调节装置通过螺栓与无人机装置下端的起落架连接,所述的采摘装置通过螺栓安装在高度平衡调节装置的连接板底部,呈轴对称分布在连接板底部四周,所述的视觉识别模块的支架通过螺栓安装在高度平衡调节装置侧面和采摘装置的末端执行器侧面,所述的收集装置的收集软管通过螺栓安装在采摘装置的采摘收集仓上。
3、所述的高度平衡调节装置是由连接板、第一旋转轴、起落架连接块、三脚架连接块、第一步进电机、第一步进电机固定板、脚架尾端固定块、脚架丝杠、脚架直流电机、第一直流电机固定板、防滑脚垫、垂直移动块、垂直丝杠、并联固定块、摇杆、摇杆固定轴和碳纤维支撑杆组成的,所述的起落架连接块通过第一旋转轴安装在连接板上,所述的三脚架连接块通过螺栓安装在连接板下端,所述的第一步进电机通过螺栓连接在第一步进电机固定板上,所述的第一步进电机固定板通过螺栓固定在三脚架连接块的下端,垂直丝杠通过联轴器安装在第一步进电机输出轴上,所述的垂直移动块通过螺纹连接在垂直丝杠上,所述的摇杆一端通过销连接在垂直移动块上,摇杆另一端套在摇杆固定轴中间,所述的碳纤维支撑杆并列套在并联固定块中,并通过摇杆固定轴固定摇杆、并联固定块和碳纤维支撑杆,所述的脚架尾端固定块通过双头螺栓安装在碳纤维支撑杆的尾端,所述的脚架丝杠通过联轴器连接在脚架直流电机的输出轴上,所述的脚架直流电机通过螺栓安装在第一直流电机固定板上,所述的第一直流电机固定板通过螺栓安装在防滑脚垫上。
4、所述的采摘装置是由第二步进电机、第二步进电机固定板、上旋转盘、下旋转盘、机械臂大臂、旋转舵机、第二旋转轴、左端盖、右端盖、第一机械臂小臂板、第二机械臂小臂板、第三机械臂、电动推杆、电动推杆固定板、直流电机、第二直流电机固定板、末端执行器、采摘收集仓组成的,所述的第二步进电机通过螺栓安装在第二步进电机固定板上,所述的第二步进电机固定板通过螺栓安装在高度平衡调节装置的连接板下端,所述的上旋转盘和下旋转盘通过螺栓连接,所述的下旋转盘焊接在机械臂大臂上,所述的左端盖通过螺栓固定在机械臂大臂左侧,所述的右端盖通过螺栓固定在机械臂大臂右侧,所述的第二旋转轴左侧通过左端盖和轴承固定在机械臂大臂左侧,第二旋转轴右侧通过右端盖和轴承固定在机械臂大臂右侧,旋转舵机通过螺栓固定安装在机械臂大臂的左侧,旋转舵机的输出轴通过联轴器与第二旋转轴连接,所述的第一机械臂小臂板与第二机械臂小臂板分布在第二旋转轴的两侧,并且通过螺栓固定,所述的电动推杆通过电动推杆固定板和螺栓安装在第二机械臂小臂板上,所述的第三机械臂通过螺栓安装在电动推杆输出段,所述的直流电机通过第二直流电机固定板安装在第三机械臂上,所述的末端执行器通过联轴器安装在直流电机的输出轴上,所述的采摘收集仓通过螺栓安装在末端执行器的侧面。
5、所述的收集装置是由收集仓、收集仓过滤隔板、负压风机、负压风机固定板、收集仓门、收集软管和合页组成的,所述的收集仓通过螺栓安装在无人机装置的底部,所述的收集仓过滤隔板通过螺栓安装在收集仓中间,将收集仓分隔为花蕾仓和花蕊仓,所述的负压风机通过负压风机固定板和螺栓安装在收集仓的侧面,所述的收集仓门通过合页和螺栓安装在收集仓的侧面,所述的收集软管通过螺栓安装在收集仓的底部。
6、所述的视觉识别模块是由双目相机、控制板和支架组成的,所述的双目相机通过螺栓固定安装在支架的外侧,所述的控制板通过螺栓安装在支架的内侧。
7、该发明的有益之处是能够通过无人机搭载玫瑰花采摘装置,完成玫瑰花的采摘工作,该发明的高度平衡调节装置,通过步进电机带动垂直移动块上升或者下降,进而带动碳纤维支撑杆旋转,实现高度平衡调节装置的整体高度,三组碳纤维支撑杆由同一个电机驱动,避免出现碳纤维支撑杆旋转不同步的现象;该发明的高度平衡调节装置的碳纤维支撑杆下端的脚架直流电机驱动脚架尾端固定块在脚架丝杠上移动,进而实现各脚架长度的微调节,以防采摘装置降落至松软的土壤里,无法保持水平的情况;该发明的收集装置中收集仓起到存储采摘后的玫瑰花的作用;该发明的收集装置的收集仓过滤隔板起到分隔收集仓内花蕊和花蕾的作用;该发明的收集装置通过马达带动负压风扇转动以产生负压效果,使得玫瑰花通过收集软管进入收集仓内;该发明的采摘装置的末端执行器尾端通过联轴器和直流电机连接,直流电机控制末端执行器和采摘收集仓旋转,进而通过旋转玫瑰花和其根茎的部位将玫瑰花摘取下来,此时负压风机启动,将受自身重力落入采摘收集仓的玫瑰花吸入到收集仓内;该发明的采摘装置有四个自由度,分别为第二步进电机带动上下旋转盘,进而带动机械臂大臂旋转,通过旋转舵机带动第二旋转轴,进而带动第一机械臂小臂板和第二机械臂小臂板旋转,通过电动推杆将第三机械臂进行伸缩移动,通过直流电机带动末端执行器旋转,可以实现控制末端执行器到达指定采摘位置;该发明的视觉识别模块的双目相机相机可以识别玫瑰花并给出其三位坐标;总而言之,该装置可以克服种植地形、种植密度等环境因素,完成玫瑰花采摘工作,提高了玫瑰花采摘效率,可广泛应用于玫瑰花采摘工作中。
技术特征:1.一种基于无人机的玫瑰花摘取装置,是由无人机装置、高度平衡调节装置、采摘装置、收集装置和视觉识别模块组成的,其特征在于:所述的无人机装置下端通过螺栓连接收集装置,所述的高度平衡调节装置通过螺栓与无人机装置下端的起落架连接,所述的采摘装置通过螺栓安装在高度平衡调节装置的连接板底部,呈轴对称分布在连接板底部,所述的视觉识别模块的支架通过螺栓安装在高度平衡调节装置侧面和采摘装置的末端执行器侧面,所述的收集装置的收集软管通过螺栓安装在采摘装置的采摘收集仓上。
2.如权利要求1所述的一种基于无人机的玫瑰花摘取装置,其特征在于:所述的高度平衡调节装置是由连接板、第一旋转轴、起落架连接块、三脚架连接块、第一步进电机、第一步进电机固定板、脚架尾端固定块、脚架丝杠、脚架直流电机、第一直流电机固定板、防滑脚垫、垂直移动块、垂直丝杠、并联固定块、摇杆、摇杆固定轴和碳纤维支撑杆组成的,所述的起落架连接块通过第一旋转轴安装在连接板上,所述的三脚架连接块通过螺栓安装在连接板下端,所述的第一步进电机通过螺栓连接在第一步进电机固定板上,所述的第一步进电机固定板通过螺栓固定在三脚架连接块的下端,垂直丝杠通过联轴器安装在第一步进电机输出轴上,所述的垂直移动块通过螺纹连接在垂直丝杠上,所述的摇杆一端通过销连接在垂直移动块上,摇杆另一端套在摇杆固定轴中间,所述的碳纤维支撑杆并列套在并联固定块中,并通过摇杆固定轴固定摇杆、并联固定块和碳纤维支撑杆,所述的脚架尾端固定块通过双头螺栓安装在碳纤维支撑杆的尾端,所述的脚架丝杠通过联轴器连接在脚架直流电机的输出轴上,所述的脚架直流电机通过螺栓安装在第一直流电机固定板上,所述的第一直流电机固定板通过螺栓安装在防滑脚垫上。
3.如权利要求1所述的一种基于无人机的玫瑰花摘取装置,其特征在于:所述的采摘装置是由第二步进电机、第二步进电机固定板、上旋转盘、下旋转盘、机械臂大臂、旋转舵机、第二旋转轴、左端盖、右端盖、第一机械臂小臂板、第二机械臂小臂板、第三机械臂、电动推杆、电动推杆固定板、直流电机、第二直流电机固定板、末端执行器、采摘收集仓组成的,所述的第二步进电机通过螺栓安装在第二步进电机固定板上,所述的第二步进电机固定板通过螺栓安装在高度平衡调节装置的连接板下端,所述的上旋转盘和下旋转盘通过螺栓连接,所述的下旋转盘焊接在机械臂大臂上,所述的左端盖通过螺栓固定在机械臂大臂左侧,所述的右端盖通过螺栓固定在机械臂大臂右侧,所述的第二旋转轴左侧通过左端盖和轴承固定在机械臂大臂左侧,第二旋转轴右侧通过右端盖和轴承固定在机械臂大臂右侧,旋转舵机通过螺栓固定安装在机械臂大臂的左侧,旋转舵机的输出轴通过联轴器与第二旋转轴连接,所述的第一机械臂小臂板与第二机械臂小臂板分布在第二旋转轴的两侧,并且通过螺栓固定,所述的电动推杆通过电动推杆固定板和螺栓安装在第二机械臂小臂板上,所述的第三机械臂通过螺栓安装在电动推杆输出段,所述的直流电机通过第二直流电机固定板安装在第三机械臂上,所述的末端执行器通过联轴器安装在直流电机的输出轴上,所述的采摘收集仓通过螺栓安装在末端执行器的侧面。
4.如权利要求1所述的一种基于无人机的玫瑰花摘取装置,其特征在于:所述的收集装置是由收集仓、收集仓过滤隔板、负压风机、负压风机固定板、收集仓门、收集软管和合页组成的,所述的收集仓通过螺栓安装在无人机装置的底部,所述的收集仓过滤隔板通过螺栓安装在收集仓中间,将收集仓分隔为花蕾仓和花蕊仓,所述的负压风机通过负压风机固定板和螺栓安装在收集仓的侧面,所述的收集仓门通过合页和螺栓安装在收集仓的侧面,所述的收集软管通过螺栓安装在收集仓的底部。
5.如权利要求1所述的一种基于无人机的玫瑰花摘取装置,其特征在于:所述的视觉识别模块是由双目相机、控制板和支架组成的,所述的双目相机通过螺栓固定安装在支架的外侧,所述的控制板通过螺栓安装在支架的内侧。
技术总结一种基于无人机的玫瑰花摘取装置,属于农业机械领域。是由无人机装置、高度平衡调节装置、采摘装置、收集装置和视觉识别模块组成的。该装置的高度平衡调节装置可以根据玫瑰花簇的高度调整落地时的高度,以防损坏玫瑰花枝叶,该装置的脚架设置滚珠丝杠,通过丝杠微调脚架长度,保证该装置的水平状态,该装置的采摘装置的末端执行器通过直流电机驱动,并且在采摘玫瑰花后通过旋转根茎进而采摘玫瑰花,玫瑰花受自身重力和负压风机的吸力被吸入收集仓,收集仓内设置花蕾仓和花蕊仓,分别存放,提高采摘效率。技术研发人员:石运伟,张校,魏立凯,张允,高进强,徐珂受保护的技术使用者:山东思创机器人科技有限公司技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/331173.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表