一种应用于自锁接头自动对接的纠偏方法与流程
- 国知局
- 2024-12-06 12:13:01
本发明涉及自锁接头对接,具体为一种应用于自锁接头自动对接的纠偏方法。
背景技术:
1、自锁接头是一种无需工具就能快速连接和断开的接头类型,通常采用人工对接和分离的方式,这种方法需要人工操作公母头旋转对接。
2、现有的整个过程需要投入大量的人力,周期也较长,另外对接和分离的整个过程中都可能因人为差错,导致接头损坏,而且于化工场所进行人工对接或分离时容易因化合物溢出对人体造成一定危害。
3、于是,有鉴于此,针对现有的结构及缺失予以研究改良,提出一种应用于自锁接头自动对接的纠偏方法。
技术实现思路
1、针对现有技术的不足,本发明提供了一种应用于自锁接头自动对接的纠偏方法,解决了上述背景技术中提出的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种应用于自锁接头自动对接的纠偏方法,应用于自锁接头自动对接的纠偏方法包括下述操作步骤:
3、s1、示教演示:
4、旋转接头公头固定在工件上,母头在机械臂末端,手动示教旋转接头公头和母头对接过程中的各个运动点位位置;
5、s2、基准位置匹配:
6、用3d视觉对旋转接头公头进行拍照,获取其基准位置和机械臂的工具坐标进行匹配;
7、s3、偏移值获取:
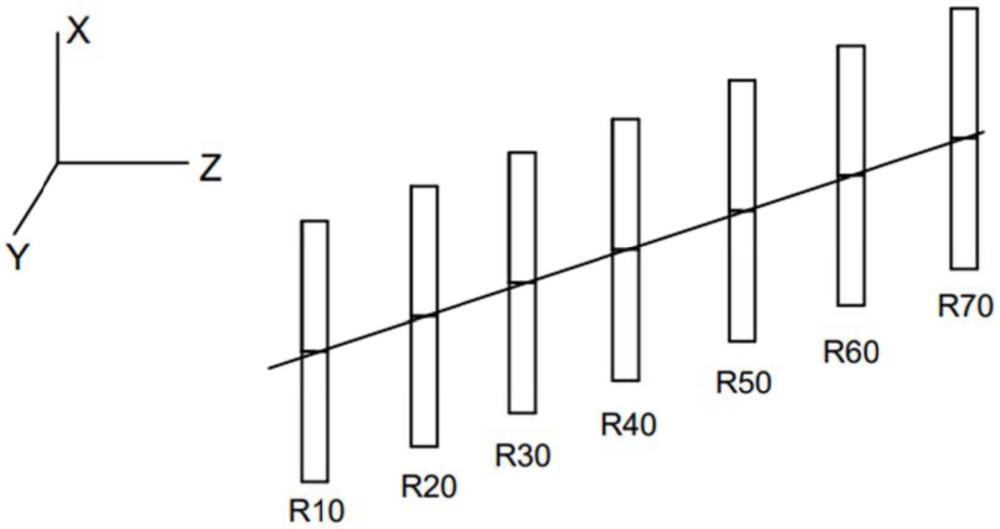
8、在自动插拔前,机械臂携带3d相机对旋转接头公头进行拍照,获取其空间偏移位姿,得到x、y、z、rx、ry的偏移值,在基准坐标下的各个运动点位的x、y、z、rx、ry方向进行补偿;
9、s4、计算平面上的偏移点:
10、在每个运动点的参考点的基础上,计算出该平面上p10、p20、p30、p40四个方向的偏移点;
11、s5、机械臂移动:
12、机械臂依次运行至p10、p20、p30、p40四个基准点位,在每个点位读取机械臂末端六维力传感器的数值,并对其合力进行计算,得出x、y、rx、ry的最小合力点,机械臂运行至该点;
13、s6、接头分离:
14、接头需要分离时,按照上述步骤进行逆向旋转接口使得接头公头与母头分离。
15、进一步的,所述步骤s1中,示教过程被利用3d视觉进行拍照,人工于照片上选取各个运动点位位置。
16、进一步的,所述步骤s3中,各基准点的偏移点,即运动点的参考点。
17、进一步的,所述步骤s5中,若p40点位合力最小,则机械臂依次运行至以p40为圆心的p10-1、p20-1、p30-1、p40-1四个点位,在每个点位读取机械臂末端六维力传感器的数值,并对其合力进行计算,得出x、y、rx、ry的最小合力点,机械臂运行至该点。
18、进一步的,所述机械臂运行至该点后判断最小合力是否满足设定值,不满足则机械臂继续寻找最小合力点。
19、进一步的,所述机械臂继续寻找最小合力点时,若p40-1点位合力最小,则机械臂依次运行至以p40-1为圆心的p10-2、p20-2、p30-2、p40-2四个点位,在每个点位读取机械臂末端六维力传感器的数值,并对其合力进行计算,得出x、y、rx、ry的最小合力点,机械臂运行至该点。
20、进一步的,所述最小合力满足设定值时,机械臂在合力最小点运行至下一运动点并在该运动点执行步骤s5的操作,直至机械臂走完所有运动点,此时监视六维力传感器的扭矩值,判断接头知否拧紧。
21、进一步的,所述步骤s5中,合力计算如下:
22、p10,{x=centerx-spacing,y=centery}
23、p20,{x=centerx+spacing,y=centery}
24、p30,{x=centerx,y=centery-spacing}
25、p40,{x=centerx,y=centery+spacing}
26、其中centerx为基准点x坐标,centery为基准点y坐标,spacing为下一搜索点偏移量;
27、
28、
29、其中,fxy1,frxry1为六维力传感器在x、y方向的合力,fx1为六维力传感器在x方向的值,fy1为六维力传感器在y方向的值,frx1为六维力传感器在rx方向的值,fry1为六维力传感器在ry方向的值。
30、进一步的,所述应用于自锁接头自动对接的纠偏方法应用于自锁接头自动对接分离的操作领域。
31、本发明提供了一种应用于自锁接头自动对接的纠偏方法,具备以下有益效果:
32、1.该应用于自锁接头自动对接的纠偏方法,利用机械臂末端工装配合六维力传感器,配合3d视觉获取自锁接头公头的偏移位姿,通过计算得出机械臂前进点位姿态,并由旋转到位检测功能,实现机械臂对自锁接头的位置识别以及插和拔功能,由此使得自锁接头自动对接时的定位精度高,稳定性强,此方法可扩展在各种自动旋转对接的设备中,且无需进行人工对接操作,由此大幅缩短周期,避免出现人为差错导致接头损坏,且于化工场景中可代替人工进行接头自动对接与分离,避免人为操作产生安全隐患。
技术特征:1.一种应用于自锁接头自动对接的纠偏方法,其特征在于:应用于自锁接头自动对接的纠偏方法包括下述操作步骤:
2.根据权利要求1所述的一种应用于自锁接头自动对接的纠偏方法,其特征在于:所述步骤s1中,示教过程被利用3d视觉进行拍照,人工于照片上选取各个运动点位位置。
3.根据权利要求1所述的一种应用于自锁接头自动对接的纠偏方法,其特征在于:所述步骤s3中,各基准点的偏移点,即运动点的参考点。
4.根据权利要求1所述的一种应用于自锁接头自动对接的纠偏方法,其特征在于:所述步骤s5中,若p40点位合力最小,则机械臂依次运行至以p40为圆心的p10-1、p20-1、p30-1、p40-1四个点位,在每个点位读取机械臂末端六维力传感器的数值,并对其合力进行计算,得出x、y、rx、ry的最小合力点,机械臂运行至该点。
5.根据权利要求4所述的一种应用于自锁接头自动对接的纠偏方法,其特征在于:所述机械臂运行至该点后判断最小合力是否满足设定值,不满足则机械臂继续寻找最小合力点。
6.根据权利要求5所述的一种应用于自锁接头自动对接的纠偏方法,其特征在于:所述机械臂继续寻找最小合力点时,若p40-1点位合力最小,则机械臂依次运行至以p40-1为圆心的p10-2、p20-2、p30-2、p40-2四个点位,在每个点位读取机械臂末端六维力传感器的数值,并对其合力进行计算,得出x、y、rx、ry的最小合力点,机械臂运行至该点。
7.根据权利要求6所述的一种应用于自锁接头自动对接的纠偏方法,其特征在于:所述最小合力满足设定值时,机械臂在合力最小点运行至下一运动点并在该运动点执行步骤s5的操作,直至机械臂走完所有运动点,此时监视六维力传感器的扭矩值,判断接头知否拧紧。
8.根据权利要求1所述的一种应用于自锁接头自动对接的纠偏方法,其特征在于:所述步骤s5中,合力计算如下:
9.根据权利要求1-8任一项所述的一种应用于自锁接头自动对接的纠偏方法,其特征在于:所述应用于自锁接头自动对接的纠偏方法应用于自锁接头自动对接分离的操作领域。
技术总结本发明公开了一种应用于自锁接头自动对接的纠偏方法,涉及自锁接头对接技术领域,包括下述操作步骤:S1、示教演示;S2、基准位置匹配;S3、偏移值获取;S4、计算平面上的偏移点;S5、机械臂移动;S6、接头分离。该应用于自锁接头自动对接的纠偏方法,利用机械臂末端工装配合六维力传感器,配合3D视觉获取自锁接头公头的偏移位姿,通过计算得出机械臂前进点位姿态,并由旋转到位检测功能,实现机械臂对自锁接头的位置识别以及插和拔功能,由此使得自锁接头自动对接时的定位精度高,稳定性强,此方法可扩展在各种自动旋转对接的设备中,且无需进行人工对接操作,由此大幅缩短周期,避免出现人为差错导致接头损坏,且于化工场景中可代替人工进行接头自动对接与分离,避免人为操作产生安全隐患。技术研发人员:高立阳,袁振亚受保护的技术使用者:天星先进材料科技(苏州)有限公司技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/340012.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表