无人化塔机的场景控制方法及系统与流程
- 国知局
- 2024-12-26 15:02:31
本发明涉及无人化塔机的,尤其涉及一种无人化塔机的场景控制方法及系统。
背景技术:
1、随着科技的发展,无人化塔机应用于建筑工地,并采用智能化控制,此时,无人化塔机设有塔吊部分,该塔吊部分作为无人化塔机的工作部分,在现有技术中,无人化塔机应用于不同的工作场景,无人化塔机的工作场景一般通过拍摄的图像进行识别,仅仅依赖相机进行把控,无法兼容塔吊部分、激光雷达、相机的整体考虑,影响了工作场景的精准性。
技术实现思路
1、本发明的目的在于克服现有技术的不足,本发明提供了一种无人化塔机的场景控制方法及系统,遍历无人化塔机,并定位无人化塔机中的塔吊部分、激光雷达以及相机;基于激光雷达采集塔吊部分所对应的操作区域的激光点云集合,根据激光点云集合构建第一层图像;基于相机采集塔吊部分所对应的操作区域的画面图像集合,根据画面图像集合构建第二层图像;根据第一层图像以及第二层图像构建操作区域的整体图像,基于第一层图像以及第二层图像进行多维度把控,并保证了操作区域的整体图像的精度。
2、同时,基于塔吊部分、激光雷达和相机之间的相对位置定义对应的位置参数;基于操作区域的整体图像划分多个子图像,根据多个子图像、位置参数以及塔吊部分的操作轨迹定义图像优化逻辑,并根据图像优化逻辑以及多个子图像触发多个子图像的在线优化,实现了整体图像的在线优化,从而根据多个子图像构建塔吊部分至操作区域之间的工作空间,并基于工作空间、塔吊部分的操作轨迹定义塔吊部分的安全区域,根据安全区域、工作空间、优化后的多个子图像定义对应的工作场景,实现了安全区域、工作空间、优化后的多个子图像的多维度把控,并保证了工作场景的精准性,兼容了塔吊部分、激光雷达、相机的整体考虑。
3、本发明实施例提供了一种无人化塔机的场景控制方法,应用于无人化塔机的场景控制场景;
4、所述无人化塔机的场景控制方法,包括:
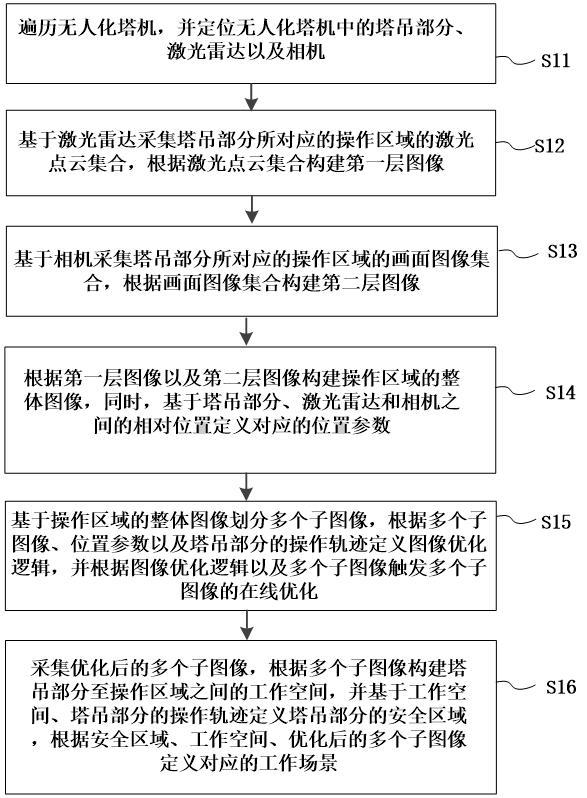
5、遍历无人化塔机,并定位无人化塔机中的塔吊部分、激光雷达以及相机;
6、基于激光雷达采集塔吊部分所对应的操作区域的激光点云集合,根据激光点云集合构建第一层图像;
7、基于相机采集塔吊部分所对应的操作区域的画面图像集合,根据画面图像集合构建第二层图像;
8、根据第一层图像以及第二层图像构建操作区域的整体图像,同时,基于塔吊部分、激光雷达和相机之间的相对位置定义对应的位置参数;
9、基于操作区域的整体图像划分多个子图像,根据多个子图像、位置参数以及塔吊部分的操作轨迹定义图像优化逻辑,并根据图像优化逻辑以及多个子图像触发多个子图像的在线优化;
10、采集优化后的多个子图像,根据多个子图像构建塔吊部分至操作区域之间的工作空间,并基于工作空间、塔吊部分的操作轨迹定义塔吊部分的安全区域,根据安全区域、工作空间、优化后的多个子图像定义对应的工作场景。
11、可选的,所述遍历无人化塔机,并定位无人化塔机中的塔吊部分、激光雷达以及相机,包括:
12、采集无人化塔机所在的位置,根据无人化塔机所在的位置定位无人化塔机;
13、基于无人化塔机的遍历而划分无人化塔机中的多个工作模块;
14、基于多个工作模块的识别而定义塔吊部分、激光雷达以及相机,并定位无人化塔机中的塔吊部分、激光雷达以及相机;
15、关联激光雷达以及相机,根据激光雷达的型号以及相机的型号定义匹配系数;
16、根据匹配系数、激光雷达所探测的范围、相机所探测的范围以及塔吊部分的朝向定义塔吊部分所对应的操作区域。
17、可选的,所述基于激光雷达采集塔吊部分所对应的操作区域的激光点云集合,根据激光点云集合构建第一层图像,包括:
18、定格塔吊部分所对应的操作区域;
19、基于激光雷达的采集方向、塔吊部分的朝向以及操作区域定义激光雷达的采集区域;
20、根据激光雷达的采集区域以及激光雷达的采集模式定义多个激光点云;
21、根据多个激光点云构建塔吊部分所对应的操作区域的激光点云集合;
22、基于操作区域的激光点云集合的筛选而定格异常点云,并根据异常点云、外轮廓点云定义对应的点云优化模式;
23、根据点云优化模式以及操作区域的激光点云集合定义优化后的激光点云集合,根据优化后的激光点云集合、激光雷达的使用年限以及点云识别逻辑构建第一层图像。
24、可选的,所述基于相机采集塔吊部分所对应的操作区域的画面图像集合,根据画面图像集合构建第二层图像,包括:
25、定格塔吊部分所对应的操作区域;
26、基于相机的采集方向、塔吊部分的朝向以及操作区域定义相机的采集区域;
27、根据相机的采集区域以及相机的采集模式定义多个画面;
28、根据多个画面构建塔吊部分所对应的操作区域的画面集合;
29、基于操作区域的画面集合的筛选而定格异常区域,并根据异常区域、多个画面之间的拼接轨迹定义对应的画面优化模式;
30、根据画面优化模式以及操作区域的画面集合定义优化后的画面集合,根据优化后的画面集合、相机的对焦参数以及画面识别逻辑构建第二层图像。
31、可选的,所述根据第一层图像以及第二层图像构建操作区域的整体图像,同时,基于塔吊部分、激光雷达和相机之间的相对位置定义对应的位置参数,包括:
32、定格第一层图像以及第二层图像;
33、对第一层图像以及第二层图像进行图像匹配,并定义对应的图像匹配系数;
34、根据图像匹配系数、第一层图像中的区域部分、第二层图像中的区域部分构建操作区域的整体图像;
35、定格塔吊部分、激光雷达以及相机,并定义塔吊部分、激光雷达和相机之间的相对位置;
36、基于塔吊部分、激光雷达和相机之间的相对位置以及塔吊部分所在的操作空间定义对应的位置参数。
37、可选的,所述基于操作区域的整体图像划分多个子图像,根据多个子图像、位置参数以及塔吊部分的操作轨迹定义图像优化逻辑,并根据图像优化逻辑以及多个子图像触发多个子图像的在线优化,包括:
38、根据操作区域的整体图像的划分而形成多个子图像;
39、根据多个子图像的识别而定义异常部分,并根据异常部分所在的位置触发激光雷达以及相机的针对性复查,以优化异常部分。
40、可选的,所述基于操作区域的整体图像划分多个子图像,根据多个子图像、位置参数以及塔吊部分的操作轨迹定义图像优化逻辑,并根据图像优化逻辑以及多个子图像触发多个子图像的在线优化,还包括:
41、关联多个子图像、位置参数以及塔吊部分的操作轨迹;
42、根据多个子图像、位置参数以及塔吊部分的操作轨迹定义图像优化逻辑;
43、定格图像优化逻辑,并关联图像优化逻辑以及多个子图像;
44、根据图像优化逻辑以及多个子图像触发多个子图像的在线优化。
45、可选的,所述采集优化后的多个子图像,根据多个子图像构建塔吊部分至操作区域之间的工作空间,并基于工作空间、塔吊部分的操作轨迹定义塔吊部分的安全区域,根据安全区域、工作空间、优化后的多个子图像定义对应的工作场景,包括:
46、采集优化后的多个子图像;
47、根据多个子图像以及塔吊部分的操作轨迹构建塔吊部分至操作区域之间的工作空间;
48、定格塔吊部分至操作区域之间的工作空间,并关联基于工作空间、塔吊部分的操作轨迹;
49、基于工作空间、塔吊部分的操作轨迹定义塔吊部分的安全区域。
50、可选的,所述采集优化后的多个子图像,根据多个子图像构建塔吊部分至操作区域之间的工作空间,并基于工作空间、塔吊部分的操作轨迹定义塔吊部分的安全区域,根据安全区域、工作空间、优化后的多个子图像定义对应的工作场景,还包括:
51、关联安全区域、工作空间、优化后的多个子图像;
52、基于安全区域以及工作空间定义第一场景参数,并基于安全区域以及优化后的多个子图像定义第二场景参数;
53、根据第二场景参数、第一场景参数以及场景匹配表定义对应的工作场景。
54、另外,本发明实施例还提供了一种无人化塔机的场景控制系统,所述无人化塔机的场景控制系统包括:
55、遍历模块,用于遍历无人化塔机,并定位无人化塔机中的塔吊部分、激光雷达以及相机;
56、第一层图像模块,用于基于激光雷达采集塔吊部分所对应的操作区域的激光点云集合,根据激光点云集合构建第一层图像;
57、第二层图像模块,用于基于相机采集塔吊部分所对应的操作区域的画面图像集合,根据画面图像集合构建第二层图像;
58、位置模块,用于根据第一层图像以及第二层图像构建操作区域的整体图像,同时,基于塔吊部分、激光雷达和相机之间的相对位置定义对应的位置参数;
59、优化模块,用于基于操作区域的整体图像划分多个子图像,根据多个子图像、位置参数以及塔吊部分的操作轨迹定义图像优化逻辑,并根据图像优化逻辑以及多个子图像触发多个子图像的在线优化;
60、工作场景模块,用于采集优化后的多个子图像,根据多个子图像构建塔吊部分至操作区域之间的工作空间,并基于工作空间、塔吊部分的操作轨迹定义塔吊部分的安全区域,根据安全区域、工作空间、优化后的多个子图像定义对应的工作场景。
61、在本发明实施例中,通过本发明实施例中的方法,遍历无人化塔机,并定位无人化塔机中的塔吊部分、激光雷达以及相机;基于激光雷达采集塔吊部分所对应的操作区域的激光点云集合,根据激光点云集合构建第一层图像;基于相机采集塔吊部分所对应的操作区域的画面图像集合,根据画面图像集合构建第二层图像;根据第一层图像以及第二层图像构建操作区域的整体图像,基于第一层图像以及第二层图像进行多维度把控,并保证了操作区域的整体图像的精度。
62、同时,基于塔吊部分、激光雷达和相机之间的相对位置定义对应的位置参数;基于操作区域的整体图像划分多个子图像,根据多个子图像、位置参数以及塔吊部分的操作轨迹定义图像优化逻辑,并根据图像优化逻辑以及多个子图像触发多个子图像的在线优化,实现了整体图像的在线优化,从而根据多个子图像构建塔吊部分至操作区域之间的工作空间,并基于工作空间、塔吊部分的操作轨迹定义塔吊部分的安全区域,根据安全区域、工作空间、优化后的多个子图像定义对应的工作场景,实现了安全区域、工作空间、优化后的多个子图像的多维度把控,并保证了工作场景的精准性,兼容了塔吊部分、激光雷达、相机的整体考虑。
本文地址:https://www.jishuxx.com/zhuanli/20241226/344282.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表