用于在自动储存和取出系统中临时储存容器的缓冲系统的制作方法
- 国知局
- 2025-01-17 13:09:57
本发明涉及一种用于在自动储存和取出系统中临时储存容器的缓冲系统。本发明还涉及一种存取站,用于将来自自动储存和取出系统的储存容器呈递给存取站处的操作者。本发明还涉及一种包括框架结构的自动储存和取出系统。本发明还涉及一种用于在自动储存和取出系统中临时储存容器的方法。
背景技术:
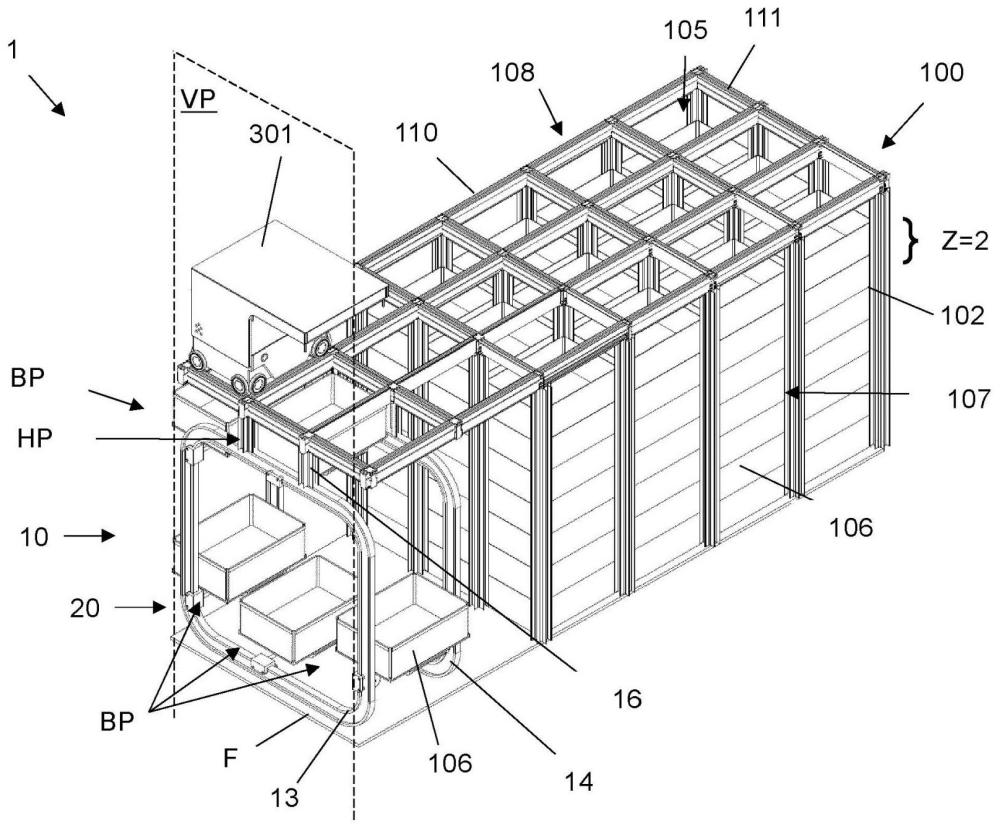
1、图1公开了具有框架结构100的现有技术自动储存和取出系统1,并且图2、图3和图4公开了适用于在这种系统1上运行的三种不同的现有技术容器搬运车辆201、301、401。
2、框架结构100包括直立构件102和储存容积,该储存容积包括在直立构件102之间成行布置的储存柱105。在这些储存柱105中,储存容器106(也称为箱)彼此叠置地堆叠以形成堆垛107。构件102通常可以由金属(例如挤压铝型材)制成。
3、自动储存和取出系统1的框架结构100包括横跨框架结构100的顶部布置的轨道系统108,多个容器搬运车辆201、301、401可以在该轨道系统108上运行以将储存容器106从储存柱105升高以及将储存容器106降低到储存柱中,并且还在储存柱105上方运输储存容器106。轨道系统108包括:第一组平行轨道110,布置成引导容器搬运车辆201、301、401沿第一方向x横跨框架结构100的顶部移动;以及第二组平行轨道111,布置成垂直于第一组轨道110,以引导容器搬运车辆201、301、401沿垂直于第一方向x的第二方向y的移动。储存在列105中的容器106由容器搬运车辆201、301、401通过轨道系统108中的存取开口112进行存取。容器搬运车辆201、301、401可以在储存柱105上方横向移动,即在平行于水平x-y平面的平面中。
4、在将容器从列105升高以及将容器降低到列中的期间,框架结构100的直立构件102可用于引导储存容器。容器106的堆垛107通常是自支撑的。
5、每个现有技术容器搬运车辆201、301、401包括车身201a、301a、401a以及第一组车轮和第二组车轮201b、201c、301b、301c、401b、401c,这些车轮分别使得容器搬运车辆201、301、401能够在x方向和y方向上横向移动。在图2、图3和图4中,每组中的两个车轮是完全可见的。第一组车轮201b、301b、401b布置成与第一组轨道110的两个相邻轨道接合,并且第二组车轮201c、301c、401c布置成与第二组轨道111的两个相邻轨道接合。可以提升和降低至少一组车轮201b、201c、301b、301c、401b、401c,使得第一组车轮201b、301b、401b和/或第二组车轮201c、301c、401c可以随时与相应的一组轨道110、111接合。
6、每个现有技术容器搬运车辆201、301、401还包括用于竖直运输储存容器106的升降装置,例如,将储存容器106从储存柱105升高以及将储存容器106降低到储存柱中。升降装置包括适于接合储存容器106的一个或多个夹持/接合装置,并且这些夹持/接合装置可以从车辆201、301、401降低,使得可以在与第一方向x和第二方向y正交的第三方向z上调节夹持/接合装置相对于车辆201、301、401的位置。容器搬运车辆301、401的夹持装置的一些部分在图3和图4中示出,用参考标号304、404表示。容器搬运装置201的夹持装置位于图2中的车身201a内并且因此未示出。
7、传统地,并且还出于本技术的目的,z=1标识轨道110、111下方的可用于储存容器的最上层,即紧邻在轨道系统108下方的层,z=2标识轨道系统108下方的第二层,z=3标识第三层,等等。在图1中公开的示例性现有技术中,z=8标识储存容器的最下部的底层。类似地,x=1...n和y=1...n标识每个储存柱105在水平平面中的位置。因此,作为实例,并且使用图1中所示的笛卡尔坐标系x、y、z,图1中标识为106’的储存容器可以称为占据储存位置x=17,y=1,z=6。容器搬运车辆201、301、401可以称为在层z=0中行驶,并且每个储存柱105可以由其x坐标和y坐标标识。因此,图1中所示的在轨道系统108上方延伸的储存容器还可以称为布置在层z=0中。
8、框架结构100的储存容积通常称为网格104,其中在该网格内的可能储存位置称为储存单元。每个储存柱可以由在x方向和y方向上的位置来标识,而每个储存单元可以由在x方向、y方向和z方向上的容器标号来标识。
9、每个现有技术容器搬运车辆201、301、401包括用于当横跨轨道系统108运输储存容器106时接收并装载储存容器106的储存隔室或空间。储存空间可以包括布置在车身201a、401a内部的腔,如图2和图4所示,以及如例如wo2015/193278a1和wo2019/206487a1中描述的,其内容通过引证结合于本文。
10、图3示出了具有悬臂结构的容器搬运车辆301的可替代构造。例如no317366中详细描述了这种车辆,其内容也通过引证结合于本文。
11、图2中所示的腔式容器搬运车辆201可以具有覆盖具有在x方向和y方向上的尺寸的区域的占地区,该占地区通常等于储存柱105的横向范围,例如在wo2015/193278a1中描述的,其内容通过引证结合于本文。本文中使用的术语“横向”可以指“水平”。
12、可替代地,腔式容器搬运车辆401的占地区可以大于由储存柱105限定的横向区域,如图1和图4所示以及例如在wo2014/090684a1或wo2019/206487a1中所公开的。
13、轨道系统108通常包括具有凹槽的轨道,车辆的车轮在该凹槽中行进。可替代地,轨道可以包括向上伸出的元件,其中车辆的车轮包括凸缘以防止脱轨。这些凹槽和向上伸出的元件统称为导轨。每个轨道可以包括一个导轨,或者每个轨道110、111可以包括两个平行的导轨。在其他轨道系统108中,在一个方向(例如,x方向)上的每个轨道可以包括一个导轨,并且在另一垂直方向(例如,y方向)上的每个轨道可以包括两个导轨。每个轨道110、111还可以包括紧固在一起的两个导轨构件,每个导轨构件提供由每个轨道提供的一对导轨中的一个导轨。
14、wo2018/146304a1(其内容通过引证结合于本文)示出了包括在x方向和y方向两者上的轨道和平行导轨的轨道系统108的典型构造。
15、在框架结构100中,大部分列105是储存柱105,即储存容器106以堆垛107储存的列105。然而,一些列105可以具有其他目的。在图1中,列119和120是通过使用容器搬运车辆201、301、401来卸载和/或拾取储存容器106的这种专用列,使得其可以被运输到存取站(未示出),在存取站处,可以从框架结构100的外部存取储存容器106,或者将储存容器移出或移入框架结构100。在本领域内,这种位置通常称为“端口”,并且端口所在的列可以称为“端口列”119、120。到存取站的运输可以是在任何方向上,即水平、倾斜和/或竖直的方向。例如,储存容器106可以放置在框架结构100内的随机或专用列105中,然后通过任何容器搬运车辆拾取并且运输到端口列119、120以用于进一步运输到存取站。从端口到存取站的运输可能需要通过诸如运送车辆、手推车或其他运输线路等手段沿着多个不同的方向移动。注意,术语“倾斜”表示具有在水平与竖直之间的某个大致运输定向的储存容器106的运输。
16、在图1中,第一端口列119例如可以是专用卸载端口列,其中,容器搬运车辆201、301、401可以将运输的储存容器106卸载到存取站或转移站,并且第二端口列120可以是专用拾取端口列,其中,容器搬运车辆201、301、401可以拾取已经从存取站或转移站运输的储存容器106。
17、存取站通常可以是拾取站或备货站,在该拾取站或备货站处,将产品物品从储存容器106移除或定位在该储存容器中。在拾取站或备货站中,通常不将储存容器106从自动储存和取出系统1移除,而是在存取后就使其再次返回到框架结构100中。端口还可用于将储存容器转移到另一个储存设施(例如,转移到另一个框架结构或转移到另一个自动储存和取出系统)、转移到运输车辆(例如火车或卡车)或转移到生产设施。
18、通常采用包括传送器的传送器系统在端口列119、120与存取站之间运输储存容器。
19、如果端口列119、120和存取站位于不同的高度处,则传送器系统可以包括具有竖直部件的升降装置,以用于在端口列119、120与存取站之间竖直地运输储存容器106。
20、传送器系统可以布置成在不同的框架结构之间转移储存容器106,例如在wo2014/075937a1中所描述的,其内容通过引证结合于本文。
21、当要存取储存在图1中公开的一个列105中的储存容器106时,指示容器搬运车辆201、301、401中的一个从其位置取出目标储存容器106并且将该储存容器运输到卸载端口列119。这一操作涉及将容器搬运车辆201、301、401移动到目标储存容器106所位于的储存柱105上方的位置,使用容器搬运车辆201、301、401的升降装置(未示出)从储存柱105取出储存容器106,并且将储存容器106运输到卸载端口列119。如果目标储存容器106位于堆垛107内的深处,即,其中一个或多个其他储存容器106定位在目标储存容器106上方,则该操作还涉及在从储存柱105提升目标储存容器106之前临时移动定位在上方的储存容器。在本领域内有时称为“挖掘”的此步骤可以利用随后用于将目标储存容器运输到卸载端口列119的同一容器搬运车辆或者利用一个或多个其他协作的容器搬运车辆来执行。可替代地或此外,自动储存和取出系统1可以具有专门用于从储存柱105临时移除储存容器106的任务的容器搬运车辆201、301、401。一旦目标储存容器106已经从储存柱105移除,就可以将临时移除的储存容器106重新定位到原始储存柱105中。然而,可替代地,可以将移除的储存容器106重新定位到其他储存柱105。
22、当要将储存容器106储存在一个列105中时,指示容器搬运车辆201、301、401中的一个从拾取端口列120拾取储存容器106并且将该储存容器运输到要将其储存至其中的储存柱105上方的位置。在已经移除了定位在堆垛107内的目标位置处或该目标位置上方的任何储存容器106之后,容器搬运车辆201、301、401将储存容器106定位在期望位置处。然后,可以将移除的储存容器106降低回到储存柱105中,或者重新定位到其他储存柱105。
23、为了监测和控制自动储存和取出系统1,例如监测和控制各个储存容器106在框架结构100内的位置、每个储存容器106的内容物以及容器搬运车辆201、301、401的移动,使得期望的储存容器106可以在期望的时间运送到期望的位置而容器搬运车辆201、301、401彼此不碰撞,自动储存和取出系统1包括控制系统500,该控制系统通常是计算机化的并且通常包括用于保持追踪储存容器106的数据库。
24、wo 2017121515描述了用于将多个储存箱储存到三维储存网格的上部位置和下部位置以及从三维储存网格的上部位置和下部位置运输的方法和系统,该三维储存网格由通过顶部轨道互连的柱构成。该系统包括从所述储存网格的上部位置延续到下部位置的可移动连续链条。该链条包括适合容纳箱的隔室。机器人车辆在储存网格的上部位置行进。这些机器人车辆适于从链条中的隔间装载和卸载箱。控制系统适于控制箱从链条中的隔室的装载和卸载。
25、wo 2019001816描述了一种自动储存和取出系统,该自动储存和取出系统包括:三维网格,具有用于储存容器的多个储存柱;一个或多个容器搬运车辆,在网格上运行以用于从储存柱中取出储存容器以及将储存容器储存在储存柱中,并且用于横跨网格水平地运输储存容器;以及升降机,用于在相对于储存网格水平布置的不同温度区之间运输容器,并且其中这些温度区由热障分隔。
26、与已知的自动储存和取出系统相关联的问题在于,拾取端口和卸载端口周围的区域可能因被指示卸载或拾取储存容器的容器搬运车辆而变得拥塞。在小型系统中,这种情况可以通过将端口添加到网格中来缓解,因为这将允许容器搬运车辆分布在更大数量的端口中以避免拥塞。然而,如果增加端口,则通常必须增加传送器系统基础设施。这需要空间,不一定可行。现有技术自动储存和取出系统的另一个问题在于,分离的卸载端口和拾取端口要求容器搬运车辆在卸载后移动到储存柱以取出新的储存容器。同样地,当将容器搬运车辆发送到拾取端口以拾取储存容器时,该容器搬运车辆必须没有储存容器。这导致效率低下并导致端口周围的拥塞增加,因为容器搬运车辆在没有储存容器作为有效载荷的情况下在网格上移动。
27、wo 2019/20697描述了上述问题的解决方案,其中自动储存和取出系统包括用于在端口列与存取站之间中继储存容器的至少一个中继模块,该中继模块布置在端口列下方,其中该中继模块包括:端口站,该端口站用于从端口列接收卸载的储存容器以及通过端口列拾取储存容器;第一传送器和第二传送器,每个传送器布置在端口站的一侧处,第一传送器适于将储存容器运输到存取站,第二传送器适于从存取站运输储存容器。横向移位装置布置成用于在端口站与第一传送器之间以及在第二传送器与端口站之间运输储存容器。此外,本发明涉及这种中继模块以及操作包括这种中继模块的自动储存和取出系统的方法。
28、本发明的一个目的是在框架结构内提供缓冲器,其中与从容器的堆垛中一次取出一个容器相比,可以更快地存取临时储存在缓冲器中的储存容器。
29、另一个目的是提供有效的存取站并减少存取站附近的容器搬运车辆的拥塞。因此,本发明的一个目的是提供wo 2019/206971中描述的存取站的替代存取站。更具体地,一个目的是减小存取站的占地区。
技术实现思路
1、本发明涉及一种用于在自动储存和取出系统中临时储存容器的缓冲系统,其中,该缓冲系统包括:
2、- 环状引导件;
3、- 多个容器载架,连接到环状引导件,其中,该多个容器载架可沿着环状引导件在容器搬运位置与缓冲位置之间独立移动,在容器搬运位置,容器被装载到一个容器载架上和/或从一个容器载架卸载,在缓冲位置,容器被临时储存在其相应的容器载架上。
4、在一个方面,多个容器载架可沿着环状引导件顺序地移动。
5、在一个方面,环状引导件定向在竖直平面内。
6、在一个方面,环状引导件包括第一引导构件和与该第一引导构件间隔开的第二引导构件,其中,多个容器载架连接在该第一引导构件与该第二引导构件之间。
7、在一个方面,第一引导构件和第二引导构件彼此平行。在一个方面,第一引导构件和第二引导构件定向在竖直平面内。在一个方面,第一引导构件和第二引导构件限定用于容器载架的移动的路径。在一个方面,第一引导构件和第二引导构件彼此对准。
8、在一个方面,第一引导构件和第二引导构件具有t形或h形剖面轮廓。在一个方面,环状引导件是o形或具有圆角的矩形。在一个方面,第一引导构件和第二引导构件是o形或具有圆角的矩形。
9、在一个方面,多个容器载架可沿着环状引导件仅在一个方向上在容器搬运位置与缓冲位置之间独立移动。可替代地,多个容器载架可沿着环状引导件在两个方向上在容器搬运位置与缓冲位置之间独立移动。因此,容器载架可以在第一方向上和在与第一方向相反的第二方向上移动。
10、当多个容器载架连接到环状引导件时,多个容器载架到达容器搬运位置的顺序被预确定,这基于该多个容器载架相对于其他容器载架与环状引导件的连接以及基于该多个容器载架的移动方向。
11、如本文所使用的,术语“可独立移动”用于表示每个容器载架的移动可以被独立控制。因此,在容器载架被允许仅在第一方向上移动的情况下,则可以控制至少一个容器载架保持静止,而可以控制至少一个其他容器载架在相同时间段期间在第一方向上移动。可替代地,在允许容器载架在第一方向和第二方向上移动的情况下,则可以控制至少一个容器载架保持静止,而可以控制至少一个其他容器载架在相同的时间段期间在第一方向上移动或在第二方向上移动。
12、在一个方面,多个容器载架中的每一个包括:
13、- 主体,包括用于支撑储存容器的支撑表面;
14、- 动力轮,用于使主体沿着环状引导件移动;
15、- 定向装置,用于在容器载架沿着环状引导件的移动期间对支撑表面进行定向。
16、在一个方面,多个容器载架中的每一个包括用于控制定向装置和动力轮的载架控制系统。
17、在一个方面,多个容器载架中的每一个包括用于将主体连接到环状引导件的行进件。
18、可替代地,动力轮也用于将主体连接到环状引导件的目的。
19、在一个方面,多个容器载架中的每一个包括用于将主体连接到第一引导构件的第一行进件和用于将主体连接到第二引导构件的第二行进件。
20、在一个方面,多个容器载架中的每一个包括用于使主体沿着第一引导构件移动的第一动力轮。多个容器载架中的每一个可以包括用于使主体沿着第二引导构件移动的第二动力或非动力轮。因此,单轮驱动容器载架或双轮驱动容器载架是可能的。当然,也可以为容器载架提供多于两个轮。
21、在一个方面,环状引导件包括电触头;其中,行进件包括电拾取器,该电拾取器设置成与电触点电接触,其中,动力轮和/或定向装置经由电拾取器和电触点被供应电力。
22、可替代地,容器载架可以包括超级电容器或可充电电池,该超级电容器或可充电电池在沿着环状引导件的特定位置处被充电。
23、在一个方面,每个容器载架的载架控制系统配置成控制其相关联的定向装置,以在容器载架围绕环状引导件的移动期间将支撑表面保持在水平定向。
24、在一个方面,定向装置是由载架控制系统控制的伺服电机。
25、在一个方面,载架控制系统包括用于感测支撑表面的定向的传感器。
26、在一个方面,多个容器载架中的每一个包括:
27、- 轮轴,在第一行进件与第二行进件之间延伸,其中,支撑表面布置成借助于定向装置围绕该轮轴枢转。
28、在一个方面,主体包括基座,支撑表面固定在该基座上;其中,轮轴延伸穿过设置在基座中的开口。
29、在一个方面,定向装置固定到基座。在此,定向装置在轮轴沿着环状引导件的移动期间将基座(并因此,支撑表面)相对于轮轴定向。
30、在一个方面,支撑表面包括用于防止储存容器相对于支撑表面水平移动的凸销。
31、在一个方面,凸销是从支撑表面的拐角向上突出的拐角凸销。在一个方面,凸销被接收在储存容器的面向下的表面中的凹部或切口中。优选地,凸销确保支撑表面的占地区等于储存容器的占地区。
32、在一个方面,缓冲系统的宽度小于或等于自动储存和取出系统的储存行的宽度。
33、在一个方面,储存行的宽度在此限定为两个相邻直立构件102的中心轴线之间的距离。
34、在一个方面,动力轮至少部分地位于支撑表面下方。
35、在一个方面,动力轮接合环状引导件的表面。在一个方面,由动力轮接合的环状引导件的表面是光滑表面。
36、在一个方面,定向装置允许支撑表面相对于行进件的360°移动。
37、在一个方面,载架控制系统配置成控制容器载架在不同时间和/或以不同速度的移动。
38、在一个方面,缓冲系统包括:
39、- 控制系统,设置成与相应的容器载架的载架控制系统通信,其中,控制系统配置成防止容器载架之间的碰撞。
40、在一个方面,控制系统是自动储存和取出系统的控制系统。可替代地,控制系统是与自动储存和取出系统的控制系统通信的单独的控制系统。
41、在一个方面,载架控制系统包括用于测量表示容器载架的位置的参数的传感器。可替代地,缓冲系统包括用于测量相应的容器载架的位置的一个或多个传感器。表示容器载架的位置的参数可以是相对于环状引导件的位置。表示容器载架的位置的参数可以是容器载架与其前一容器载架之间的距离和/或容器载架与其后一容器载架之间的距离。
42、在一个方面,载架控制系统可以将空的容器载架之间的距离控制为比占用的容器载架更靠近相邻的容器载架。因此,空的容器载架之间的距离可以较短,从而减少将这种空容器载架移动到容器搬运位置的时间。
43、在一个方面,相应的容器载架的载架控制系统配置成防止在其他容器载架沿着环状引导件移动期间与其他容器载架碰撞。
44、在一个方面,载架控制系统配置成在将其他容器载架沿着环状引导件移动的同时在容器搬运位置处停止容器载架的移动。
45、在一个方面,载架控制系统配置成仅当满足预定条件时才在容器搬运位置处停止容器载架的移动。
46、在一个方面,缓冲系统将容器临时储存在自动储存和取出系统的框架结构内。
47、本发明还涉及一种存取站,用于将储存容器从自动储存和取出系统呈递给存取站处的操作者,其中,存取站包括:
48、- 根据前述权利要求中任一项所述的缓冲系统;
49、其中,多个容器载架可沿着环状引导件独立移动到呈递位置,在该呈递位置,储存在其相应的容器载架上的一个储存容器被呈递给操作者。
50、在一个方面,操作者是人。可替代地,操作者是机器人。
51、在一个方面,环状引导件是基本上l形的,其中,容器搬运位置位于l形环状引导件的竖直突起的上部中,并且呈递位置沿着l形环状引导件的水平突起定位。
52、因此,存取站能够从框架结构的顶部上的储存柱之间的网格开口收集容器并在储存柱之外的位置将其呈递以供存取。
53、在一个方面,每个容器载架的载架控制系统配置成控制其相关联的定向装置以在呈递位置将支撑表面保持在相对于水平平面的倾斜定向。
54、在一个方面,当在呈递位置处于倾斜定向时,支撑表面相对于水平平面具有15°至45°的倾斜度。
55、在一个方面,环状引导件包括第一引导构件和第二引导构件,其中,第一引导构件的区段位于第一高度处,其中,第二引导构件的区段位于第二高度处,其中,沿着这些区段移动的容器载架处于其呈递位置,并且其中,第一高度大于第二高度。
56、根据上述内容,实现了支撑表面(并因此,支撑在支撑表面上的储存容器)相对于水平平面倾斜15°至45°的角度。
57、在一个方面,存取站包括多于一个呈递位置。
58、因此,可以从多于一个储存容器执行拾取,并且可以同时向多于一个储存容器执行补充。
59、本发明还涉及一种包括框架结构的自动储存和取出系统,其中,框架结构包括:
60、- 直立构件;
61、- 储存容积,包括设置在直立构件之间的储存柱,其中,储存容器可以堆垛堆叠在储存柱内;
62、- 轨道系统,设置在直立构件的顶部上;
63、其中,自动储存和取出系统包括在轨道系统上移动的容器搬运车辆;
64、其中,自动储存和取出系统包括根据上述内容的缓冲系统或根据上述内容的存取站;
65、其中,容器搬运车辆配置成将储存容器装载到处于容器搬运位置的容器载架上或从处于容器搬运位置的容器载架卸载储存容器。
66、在一个方面,缓冲系统定位在轨道系统的下方。
67、在一个方面,本发明还涉及缓冲系统的宽度小于或等于自动储存和取出系统的储存行的宽度。
68、在一个方面,储存行的宽度等于储存柱的宽度加上储存柱的每一侧上的轨道的宽度。储存柱的宽度等于储存容器的宽度。
69、因此,只有一行储存柱被缓冲系统占用。可替代地,两行或三行储存柱被缓冲系统占用。
70、本发明还涉及一种用于在自动储存和取出系统中临时储存容器的方法,其中,该方法包括以下步骤:
71、- 将连接到环状引导件的多个容器载架中的一个容器载架移动到容器搬运位置;
72、- 在一个容器载架处于容器搬运位置时,将储存容器装载到一个容器载架上;
73、- 将容器载架沿着环状引导件移动到多个缓冲位置中的一个缓冲位置;
74、- 将其他容器载架沿着环状引导件在容器搬运位置与缓冲位置之间独立移动;
75、- 将一个容器载架再次移动到容器搬运位置;
76、- 在一个容器载架处于容器搬运位置时,从一个容器载架卸载储存容器。
77、在一个方面,容器搬运位置定位在轨道系统正下方一高度处。在一个方面,储存在容器搬运位置中的储存容器可以储存在对应于z=1的高度处,即,轨道110、111下方的可用于储存容器的最上层。因此,容器搬运车辆可以在储存在容器搬运位置中的储存容器上方通行。进一步实现的是,容器搬运车辆将储存容器装载到容器搬运位置和从容器搬运位置卸载容器所用的时间相对较短。在这种自动储存和取出系统中的其他储存柱中,储存容器被提升到以堆垛堆叠的其他储存容器上,其中堆叠高度将随堆垛的不同而变化。在这种自动储存和取出系统中的其他存取站中,储存容器被提升到地面上方约1米至1.5米的高度。因此,容器搬运车辆将较少被占用。
本文地址:https://www.jishuxx.com/zhuanli/20250117/356348.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表