一种全自动制饼机的控制系统的制作方法
- 国知局
- 2024-07-12 12:32:02
本发明属于制饼机和控制系统,具体涉及一种全自动制饼机的控制系统。
背景技术:
1、制作一张饼的过程包括下料工序、揉制面团工序、压饼工序、烤饼工序,而这些工序均由人工完成,这就会导致一张饼的制作工作量较大,效率慢且人工成本高。虽然目前的制饼机可以解决这些问题,通过机器完成这些制饼工序,提高制饼的效率;但是,目前的制饼机由于控制系统导致制出来的饼的效果不好,质量差。
技术实现思路
1、本发明提供了一种全自动制饼机的控制系统,旨在解决现有技术中制饼机制饼效果不好的问题。
2、为了解决上述技术问题,本发明所采用的技术方案为:
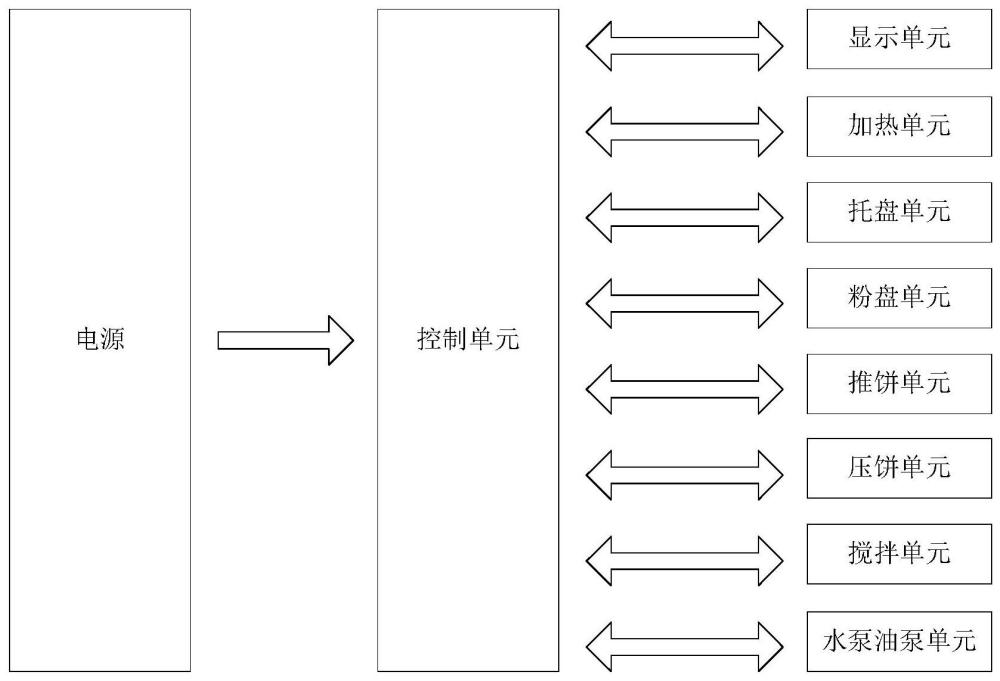
3、本发明提供了一种全自动制饼机的控制系统,包括电源、控制单元、显示单元、加热单元、托盘单元、粉盘单元、推饼单元、压饼单元、搅拌单元和水泵油泵单元;
4、所述控制单元和显示单元均与所述电源电性连接,且所述显示单元与所述控制单元电性连接,所述显示单元上设置有制饼参数输入区;所述加热单元、托盘单元、粉盘单元、推饼单元、压饼单元、搅拌单元和水泵油泵单元均与所述控制单元电性连接,且在所述控制单元的作用下完成制饼步骤。
5、进一步的方案:所述加热单元包括烤盘加热模块和温度传感器模块;所述控制单元驱动所述烤盘加热模块加热,所述温度传感器模块采集所述烤盘加热模块的温度并传输到所述控制单元中,所述控制单元根据所述温度传感器模块采集的温度控制所述烤盘加热模块的温度保持为恒温。
6、基于上述方案,所述控制单元控制所述烤盘加热模块的温度保持为恒温,即使得所述烤盘加热模块的温度一直保持在能够将饼烤制成熟的温度,不需要人工的调制温度,比较方便。
7、进一步的方案:所述托盘单元包括位置点ir1、位置点ir2、位置点ir11、位置点ir3和位置点ir4;
8、所述控制单元驱动所述托盘单元运动的具体步骤为:
9、a1、所述控制单元驱动所述托盘单元从所述位置点ir3运动到所述位置点ir2,所述托盘单元停止,进入托盘等待状态;
10、a2、所述托盘等待状态结束后,所述控制单元驱动所述托盘单元从所述位置点ir2运动到所述位置点ir1,所述托盘单元停止t1秒;
11、a3、所述托盘单元从所述位置点ir1运动到所述位置点ir2,所述托盘单元停止t2秒;
12、a4、所述托盘单元从所述位置点ir2运动到所述位置点ir1,所述托盘单元停止t3秒;
13、a5、所述托盘单元从所述位置点ir1运动到所述位置点ir2,所述托盘单元停止t4秒;
14、a6、所述托盘单元从所述位置点ir2运动到所述位置点ir11,所述托盘单元停止t5秒;
15、a7、所述托盘单元从所述位置点ir11运动到所述位置点ir4,所述托盘单元停止t6秒,且所述托盘单元向所述推饼单元传送面团;
16、a8、所述托盘单元从所述位置点ir4运动到所述位置点ir3进行复位并停止运动。
17、基于上述方案,在所述托盘等待状态期间,所述托盘单元接收所述粉盘单元传输的面粉。在所述步骤a2~a5中,所述托盘单元多次在所述位置点ir1和所述位置点ir2之间来回运动,使得所述托盘单元多次上下移动,并结合所述搅拌控制单元的搅拌动作,能够起到揉面的作用。在所述步骤a6和步骤a7中,所述托盘单元移向所述推饼单元的位置,且所述控制单元驱动所述托盘倾斜,使得所述托盘单元中成团的面团掉落到所述推饼单元中。
18、进一步的方案:在所述步骤a1中,所述托盘单元进入所述托盘等待状态,所述控制单元驱动所述搅拌单元运行,直到在所述步骤a6中,所述托盘单元从所述位置点ir2向所述位置点ir11运动第t7秒时,所述控制单元控制所述搅拌单元停止。
19、基于上述方案,所述搅拌单元在所述托盘单元中进行转动搅拌,能够模拟人工揉制面团,使得所述托盘单元中的面粉形成面团。
20、进一步的方案:所述控制单元还包括用于对所述搅拌单元异常修复功能;当所述搅拌单元异常过载时,所述控制单元驱动所述托盘单元向下移后,驱动所述搅拌单元转动;所述搅拌单元恢复转速后,所述控制单元驱动所述托盘单元上移复位。
21、基于上述方案,所述控制单元能够在所述搅拌单元异常过载时自动对异常问题进行修复,不需要人工修复,进一步优化所述全自动制饼机的自动化功能。
22、进一步的方案:所述搅拌单元开始转动的第t8秒时,所述控制单元驱动所述水泵油泵单元向所述托盘单元中加油t9秒停止后,向所述托盘单元中加水t10秒停止。
23、基于上述方案,所述水泵油泵单元向所述托盘单元中加水和油能够促进所述托盘单元中的面粉成团。另外,加水和油的量由所述控制单元控制,计量更加精准,从而使得制饼的效果较好。
24、进一步的方案:所述粉盘单元包括正向依次设置的微动信号点f1、微动信号点f3和微动信号点f2,且所述粉盘单元周围设有微动开关1和微动开关2;在初始时,所述微动信号点f1位于所述微动开关1处,且所述微动信号点f2位于所述微动开关1和所述微动开关2之间;
25、所述控制单元驱动所述粉盘单元运动的具体步骤为:
26、b1、当所述步骤a1中所述托盘单元进入所述托盘等待状态时,所述控制单元驱动所述粉盘单元转动,且所述微动信号点f2正向转动到所述微动开关2处,所述粉盘单元停止t11秒后所述步骤a1中的所述托盘等待状态结束;
27、b2、所述粉盘单元转动,且所述微动信号点f3正向转动到所述微动开关2处停止转动;
28、b3、在所述步骤a5中所述托盘单元停止t4秒中的第t12秒时,所述控制单元驱动所述粉盘单元转动,且所述微动信号点f1正向转动到所述微动开关1处复位停止。
29、基于上述方案,在所述步骤b1中,实现所述粉盘单元向所述托盘单元中输送面粉;在所述步骤b2中,所述粉盘单元停止输送面粉;在所述步骤b3中,所述微动信号点f1在正向转动到所述微动开关1期间,所述粉盘单元向托盘单元中撒面粉,能够防止所述托盘上揉制成的面团黏在所述托盘上,当所述微动信号点f1转动到所述微动开关1处时,所述粉盘单元停止撒面粉。
30、进一步的方案:所述推饼单元包括位置点ir5、位置点ir6和位置点ir7;
31、所述控制单元驱动所述推饼单元运动的具体步骤为:
32、c1、当所述步骤a6中所述托盘单元从所述位置点ir2向所述位置点ir11运动第t7秒时,所述控制单元驱动所述推饼单元从所述位置点ir5运动到所述位置点ir6,所述推饼单元停止,接收所述步骤a7中所述托盘单元传送的面团;
33、c2、所述推饼单元接收面团后在所述位置点ir6向前运动t13秒后回到所述位置点ir5,停止运动,进入第一推饼等待状态;
34、c3、所述第一推饼等待状态结束后,所述控制单元驱动所述推饼单元在所述位置点ir5运动t14秒停t15秒后回到所述位置点ir5停止,所述推饼单元停止运动进入第二推饼等待状态;
35、c4、所述第二推饼等待状态结束后,所述控制单元驱动所述推饼单元从所述位置点ir5运动到所述位置点ir7后回到所述位置点ir5停止,进行复位停止。
36、基于上述方案,在所述步骤c1中,所述位置点ir6为所述推饼单元接收面团的位置,所述推饼单元从所述位置点ir5运动到所述位置点ir6能够保证所述推饼单元精准地接收到面团。在所述步骤c2中,所述推饼单元在所述位置点ir6向前运动t13秒,能够对面团起到定位作用,将接收到的面团推至正确的位置,使得面团位于所述压饼单元的正下方。在所述步骤c3中,所述推饼单元在所述压饼单元压饼的过程中对所述面饼进行定位,避免所述面饼移动。在所述步骤c4中,所述推饼单元将压制成熟的饼推出所述全自动制饼机。
37、进一步的方案:所述压饼单元包括位置点ir8、位置点ir9、位置点ir10、位置点ir12和位置点ir13;
38、所述控制单元驱动所述压饼单元运动的具体步骤为:
39、d1、当所述步骤c2中的所述推饼单元回到所述位置点ir5时,所述控制单元驱动所述压饼单元从所述位置点ir10运动到所述位置点ir8,所述压饼单元停止t16秒;
40、d2、所述压饼单元从所述位置点ir8运动到所述位置点ir13,所述压饼单元停止t17秒,且在停止的t17秒期间,所述步骤c2中的所述第一推饼等待状态结束,所述推饼单元执行所述步骤c3;
41、d3、所述压饼单元从所述位置点ir13运动到所述位置点ir12,所述压饼单元停止t18秒;
42、d4、所述压饼单元从所述位置点ir12运动到所述位置点ir9,所述压饼单元停止t19秒;
43、d5、所述压饼单元从所述位置点ir9运动到所述位置点ir13;所述压饼单元从所述位置点ir13运动到所述位置点ir12,所述压饼单元停止t20秒后回到所述位置点ir13;
44、d6、所述压饼单元从所述位置点ir13运动到所述位置点ir12后继续向前运动t21秒回到所述位置点ir10停止,进行复位,且所述步骤c3中的所述第二推饼等待状态结束。
45、基于上述方案,在所述步骤d1中,所述压饼单元第一次下降并压制在面团上,所述压饼单元停止t16秒,从而对成饼的面团进行烤制。在所述步骤d2中,所述压饼单元上升,且所述推饼单元将饼定位,在所述步骤d3~步骤d6中,所述压饼单元多次在所述位置点ir13和所述位置点ir12之间运动,使得所述压饼单元多次对所述面饼进行按压烤制,且在在步骤d6中,面饼烤制完成,所述压饼单元回到初始位置。
46、进一步的方案:所述压饼单元根据所述显示单元设置的所述全自动制饼机参数划分为第一档位、第二挡位和第三挡位;
47、当所述压饼单元处于所述第一档位时,所述步骤中d5中的所述压饼单元在所述位置点ir12处停止2秒后回到所述位置点ir13;
48、当所述压饼单元处于所述第二档位时,所述步骤中d5中的所述压饼单元在所述位置点ir12处停止6秒后回到所述位置点ir13,并重复一次所述压饼单元从所述位置点ir13运动到所述位置点ir12,所述压饼单元停止6秒后回到所述位置点ir13;
49、当所述压饼单元处于所述第三档位时,所述步骤中d5中的所述压饼单元在所述位置点ir12处停止14秒后回到所述位置点ir13,并重复一次所述压饼单元从所述位置点ir13运动到所述位置点ir12,所述压饼单元停止14秒后回到所述位置点ir13。
50、基于上述方案,所述第二档位和第三档位均比所述第一档位多一次所述压饼单元从所述位置点ir13运动到所述位置点ir12的过程;另外,所述第三档位在所述位置ir12处停留的时间比所述第二档位在所述位置ir12处停留的时间多8秒,使得所述第一档位烤制完成的饼、第二档位烤制完成的饼和第三档位烤制完成的饼的焦脆度依次增加。另外,设置的三个档位不仅能够满足对于饼口感的不同需求,还可以满足对于饼的食材原料的不同需求,方便用户选择,提高用户的使用体验。
51、进一步的方案:一种全自动制饼机的控制系统,还包括设置在所述压饼单元外侧的安全门单元,所述安全门单元上设有用于发射光栅的发射器和用于接收光栅的接收器;当人或物穿过所述安全门单元,且阻挡所述接收器接收所述发射器发射的光栅时,所述控制单元控制所述压饼单元停止运动。
52、基于上述方案,所述安全门单元一方面能够避免所述压饼单元压制面饼时压到用户的手;另一方面避免所述压饼单元压制面饼时压到其它物品,损坏烤盘的情况发生;提高了所述全自动制饼机的安全性能。
53、进一步的方案:所述控制单元还包括用于对所述压饼单元异常修复功能;当所述压饼单元异常过流时,所述控制单元先驱动所述压饼单元反转上移,再驱动所述压饼单元下移。
54、基于上述方案,所述控制单元能够在所述压饼单元异常过流时自动对异常问题进行修复,不需要人工修复,进一步优化所述全自动制饼机的自动化功能。
55、进一步的方案:所述控制单元上设有电流采样器,当所述全自动制饼机启动时,所述控制单元驱动所述加热单元、托盘单元、粉盘单元、推饼单元、压饼单元、搅拌单元和水泵油泵单元均运行1秒,所述电流采样器分别对所述加热单元、托盘单元、粉盘单元、推饼单元、压饼单元、搅拌单元和水泵油泵单元进行电流信号采集,所述控制单元根据所述电流采样器采集的所述电流信号分别判断所述加热单元、托盘单元、粉盘单元、推饼单元、压饼单元、搅拌单元和水泵油泵单元是否故障。
56、进一步的方案:一种全自动制饼机的控制系统,还包括清洗单元,所述清洗单元与所述控制单元电性连接;当所述全自动制饼机运行结束时,所述控制单元驱动所述清洗单元对所述水泵油泵单元进行清洗。
57、基于上述方案,在制饼结束后,所述清洗单元对所述水泵油泵单元中的水箱和油箱进行清洗,不仅能够保证食品卫生、饮食健康,而且避免人工手洗,节省人工成本。
58、进一步的方案:在所述控制单元驱动所述推饼单元完成推饼动作和驱动所述压饼单元完成压饼动作的期间内,所述控制单元驱动所述托盘单元、粉盘单元和搅拌单元共同完成一次面团成团的动作。
59、基于上述方案,在所述全自动制饼机中,本次制饼过程中的推饼动作和压饼动作与下一次制饼过程中的面团成团动作同时进行,能够提高所述全自动制饼机的制饼效率。
60、本发明的有益效果为:
61、在本发明中,所述控制单元驱动所述水泵油泵单元和所述粉盘单元向所述托盘单元中投放精准用量的水、油和面粉;所述控制单元驱动所述搅拌单元在所述托盘单元中进行搅拌,使得所述托盘单元中的面粉能够成团,且所述控制单元驱动所述托盘单元将面团传送给所述推饼单元;所述推饼单元将面团定位,使得所述面团位于所述压饼单元的正下方;所述控制单元驱动所述压饼单元将面团压成饼状,所述控制单元通过所述加热单元使得所述压饼单元中的烤盘一直保持在适合烤饼的温度,从而使得在所述压饼单元将面饼烤制成熟,避免出现饼不熟或过焦的问题;烤制完成后,所述控制单元驱动所述推饼单元将烤熟的饼推出。通过本发明制出来的饼的质量更好,成功率更高,且口感更好。
本文地址:https://www.jishuxx.com/zhuanli/20240614/99219.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表