机器人的动作判定装置、动作判定方法以及动作判定程序与流程
- 国知局
- 2024-07-05 17:54:22
本发明涉及机器人的动作判定装置、动作判定方法以及动作判定程序。
背景技术:
1、以往,已知如下的机器人的控制装置:其针对设定于动作程序中的示教位置之中、存在变更可能性的示教位置,设定允许范围(例如,参照专利文献1。)。在该控制装置中,在存在变更可能性的示教位置变更时,判定变更之后的示教位置是否配置于允许范围之内。
2、另外,一般,已知如下的模拟程序:其检查设定于机器人的动作程序中的示教位置是否能够实际到达、或者在机器人的动作中是否经过奇异点等。
3、现有技术文献
4、专利文献
5、专利文献1:日本特开2020-37165号公报
技术实现思路
1、发明要解决的问题
2、在这种模拟程序中,在设定于动作程序中的所有的示教位置能够实际到达,并且也不经过奇异点的情况下,判定示教位置适当。然而,存在如下情况:即使各示教位置适当,也不期望机器人急剧地进行动作。因此,期望:容易且迅速地检查出是否存在机器人急剧进行动作的示教位置。
3、用于解决问题的方案
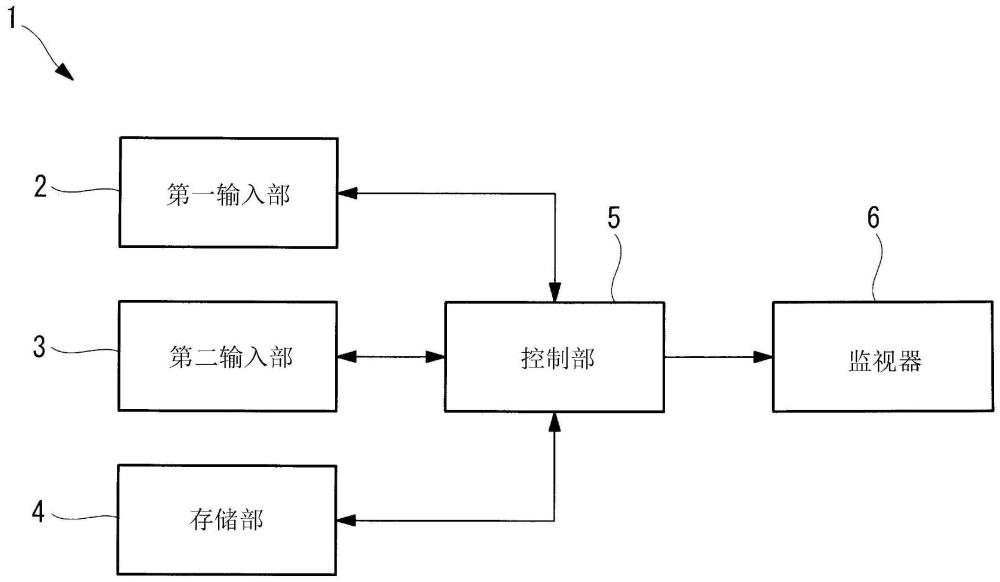
4、本发明的一个方案是一种机器人的动作判定装置,所述机器人的动作判定装置具备:输入部,其供输入用于使机器人进行动作的动作程序的至少两个示教点的位置信息;存储部,其存储允许移动量;计算部,其基于输入到所述输入部的所述位置信息,计算在所述动作程序中相邻的所述示教点之间的移动量;判定部,其判定由该计算部计算出的所述移动量是否大于存储于所述存储部的所述允许移动量;以及显示部,其在由该判定部判定所述移动量大于所述允许移动量的情况下,显示该情况。
技术特征:1.一种机器人的动作判定装置,其特征在于,具备:
2.根据权利要求1所述的机器人的动作判定装置,其特征在于,
3.根据权利要求1所述的机器人的动作判定装置,其特征在于,
4.根据权利要求1所述的机器人的动作判定装置,其特征在于,
5.根据权利要求1至4中任一项所述的机器人的动作判定装置,其特征在于,
6.一种机器人的动作判定方法,其特征在于,包括:
7.一种机器人的动作判定程序,其特征在于,
技术总结一种机器人的动作判定装置(1),其具备:输入部(2),其供输入用于使机器人进行动作的动作程序的至少两个示教点的位置信息;存储部(4),其存储允许移动量;计算部(5),其基于输入到输入部(2)的位置信息,计算在动作程序中相邻的示教点之间的移动量;判定部(5),其判定由计算部(5)计算出的移动量是否大于存储于存储部(4)的允许移动量;以及显示部,其在由判定部(5)判定移动量大于允许移动量的情况下,显示该情况。技术研发人员:林大贵受保护的技术使用者:发那科株式会社技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/49592.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表