锂电池电芯绝缘防护漆的激光去除装置及去除方法与流程
- 国知局
- 2024-06-20 15:53:55
本发明涉及锂电池电芯加工,尤其是一种锂电池电芯绝缘防护漆的激光去除装置及去除方法。
背景技术:
1、新能源汽车电池组对电芯表面绝缘性能要求越来越高,如电芯绝缘耐压、漏电流、粘结强度、对电芯壳体绝缘层的耐高温、耐老化、耐腐蚀等性能。严格控制电芯涂层均匀性以及将涂层厚度控制在更低的范围内成为电芯生产需要重点关注的问题。
2、公告号为cn117900638a的中国专利公开了一种锂电电芯绝缘防护漆的激光除漆装备及其方法,实现了锂电池电芯激光除漆的自动化操作,但依然存在若干缺陷:
3、(1)产品在滚子链上通过大面清洗激光和背面清洗激光对产品b、d面进行清洗除漆,虽然从文中附图上可以看出有设置在滚子链子侧部的除尘装置,但是这样设置难免会有剥落物掉落到滚子链子上,影响滚子链子的传输性能;
4、(2)产品e、f面的激光清洗,需要除漆机械手抓住产品放到侧面清洗激光前方,要清洗产品的c面时,又要放置到直线电机上移动到底面清洗激光的正下方;
5、(3)没有对产品a面进行清洗,且上述各面需要转移后再清洗,很耗时间;
6、(4)对于激光器的功率、扫描次数、扫描速度和离焦量等工艺参数,是预设好的,而实际中,激光器在激光过程中的这些参数随时间的长短会发生变化,需要实时检测并及时调整,才能保证去除效果;
7、(5)由于产品各面的清洗是分散设置的,所以这条清洗线上设置备用会使得整个装备更加复杂。
技术实现思路
1、本发明要解决的技术问题是:克服现有技术中之不足,提供一种锂电池电芯绝缘防护漆的激光去除装置。
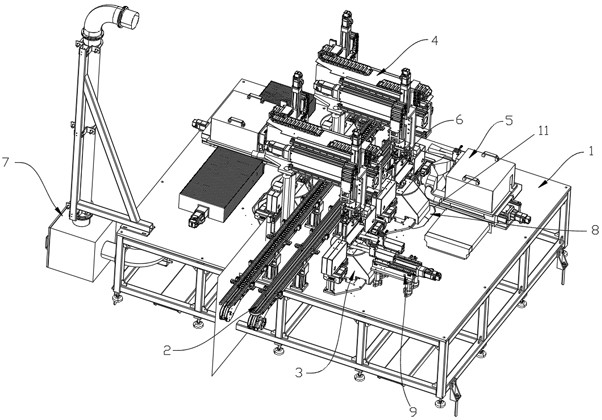
2、本发明解决其技术问题所采用的技术方案是:一种锂电池电芯绝缘防护漆的激光去除装置,包括工作台和横向设置在工作台上对锂电池电芯上下料的传输架,还包括:
3、承载翻转机构,其设置在传输架一侧,具有夹持锂电池电芯短边的夹持翻转组件以及与锂电池电芯的极柱配合的承载夹具,所述承载夹具设置于旋转组件上,所述旋转组件由升降组件驱动升降,
4、搬运机构,其纵向架设在传输架上方,具有搬运架,所述搬运架的上方两侧面上沿y轴分别安装有一直线模组,所述直线模组上设有沿y轴来回移动的搬运组件,用于从传输架上抓取锂电池电芯到承载翻转机构上或从承载翻转结构上抓取至传输架上,
5、激光机构,设置在承载翻转机构外侧,其包括发射激光的激光振镜以及追踪锂电池电芯位置并检测除漆效果的视觉检测装置,所述视觉检测装置安装在激光振镜的外壳上,所述激光振镜设置在y轴组件上,所述y轴组件设置在x轴组件上。
6、进一步地,所述夹持翻转组件包括对称设置的一对滑台模组,每个滑台模组的滑台上安装有支撑架,一个支撑架的一端安装有电机,所述电机轴穿过该支撑架连接一夹持块,所述夹持块具有螺杆部,另一夹持块的螺杆部贯穿另一个支撑架,该螺杆部上安装有编码器。
7、进一步地,所述旋转组件包括驱动电机、同步带结构和旋转座,所述同步带结构包括主动轮、同步带和从动轮,所述主动轮安装在驱动电机输出轴上,所述从动轮安装在旋转座的下端,旋转座的上端连接承载夹具。
8、更进一步地,所述升降组件包括气缸、升降架和导轨,所述导轨竖直安装在导轨支架上,导轨上的滑块连接升降架,所述气缸安装在导轨支架上,气缸的推杆正连接升降架,所述驱动电机安装在升降架的背面,驱动电机的输出轴贯穿升降架的底面,所述旋转座贯穿升降架设置。
9、进一步地,所述搬运组件包括安装立板、电缸、伺服电机和平行气爪,所述安装立板上设置有竖直滑轨,所述竖直滑轨的上方固定有电缸安装座,所述电缸的上端连接伺服电机,电缸的推杆穿过电缸安装座连接气爪安装座,所述气爪安装座下方安装平行气爪,气爪安装座通过支撑件连接在竖直滑轨上移动的连接板。
10、更进一步地,所述气爪安装座底面上连接有限位柱,所述限位柱的底部设有弹性套,所述平行气爪的气爪内壁上包覆有弹性件。
11、更进一步地,所述平行气爪的两个气爪上开设有通孔,所述气爪安装座底面上通过连接臂连接有对射式光电传感器,所述对射式光电传感器正对通孔设置。
12、进一步地,正对激光振镜的工作台上设置有激光能量功率组件,所述激光能量功率组件包括激光能量功率计、功率计支架、滑台和推杆,所述激光能量功率计安装在功率计支架上,所述功率计支架设置在滑台上,且滑台一侧设置有与功率计支架连接的推杆。
13、进一步地,所述传输架包括架体和设置在架体上的传输链,沿所述架体边沿设置有一圈限位挡环,所述限位挡环的一端封闭且呈圆弧形结构,其另一端开口,为上下料端。
14、更进一步地,该激光去除装置还包括上料扫码机构,设置于传输架一侧且靠近传输架的上下料端处,所述上料扫码机构包括滑台架、直线滑台、滑轨组件和激光扫码器,所述直线滑台安装在滑台架上,所述滑轨组件设置在直线滑台两侧的滑台架上,所述激光扫码器安装在直线滑台上。
15、进一步地,所述工作台上承载翻转机构的周围开设有落尘口;该激光去除装置还包括除尘机构,所述除尘机构包括除尘器和除尘管道,所述除尘管道具有除尘总管和除尘支管,所述除尘支管的数量等于承载翻转机构设置的数量,除尘支管的一端连接集尘斗,所述集尘斗安装在落尘口下方的工作台背面,所述除尘总管为变径管,其靠近除尘器的部分直径最大。
16、还提及一种锂电池电芯绝缘防护漆的激光去除方法,包括如下步骤:
17、(a)通过机器人上的视觉检测设备定位料框中的锂电池电芯,移动到抓取位抓取锂电池电芯,放到传输架的传输链上,上料扫码机构的直线滑台带动激光扫码器向传输架移动,对锂电池电芯进行扫码识别;
18、(b)搬运组件的伺服电机动作,带动电缸的推杆向下伸出,对射式光电传感器检测到锂电池电芯,平行气爪动作夹紧锂电池电芯的两个大面,电缸的推杆向上回缩,直线模组动作,带动搬运组件沿y轴移动到承载翻转机构处,电缸的推杆向下伸出;
19、(c)夹持翻转组件的两个滑台模组带动支撑架相向运动,夹持块夹紧锂电池电芯的短边,平行气爪松开,电缸的推杆缩回;激光振镜通过x轴组件移动,同时视觉检测装置拍照寻找锂电池电芯,找到后激光振镜通过y轴组件移动到合适位置,激光振镜发射激光对极柱面进行除漆,同时视觉检测装置对柱面进行实时拍照,检测除漆效果;
20、(d)升降组件的气缸动作,向下拉升降架,承载夹具下降;电机带动夹持块翻转180°,锂电池电芯也翻转180°,激光振镜发射激光对底面进行除漆,同时视觉检测装置对底面进行实时拍照,检测除漆效果;电机带动夹持块翻转90°,锂电池电芯也翻转90°,极柱面朝下,升降组件的气缸动作,向上推升降架,承载夹具上升,与极柱面配合,两个滑台模组带动支撑架相反运动,远离锂电池电芯,激光振镜发射激光对大面一进行除漆,同时视觉检测装置对大面一进行实时拍照,检测除漆效果;驱动电机动作,通过同步带结构带动旋转座旋转90°,锂电池电芯也旋转90°,激光振镜边移动边发射激光对侧面一进行除漆,同时视觉检测装置对侧面一进行实时拍照,检测除漆效果;驱动电机动作,通过同步带结构带动旋转座旋转180°,锂电池电芯也旋转180°,激光振镜边移动边发射激光对侧面二进行除漆,同时视觉检测装置对侧面二进行实时拍照,检测除漆效果;驱动电机动作,通过同步带结构带动旋转座旋转90°,锂电池电芯也旋转90°,激光振镜边移动边发射激光对大面二进行除漆,同时视觉检测装置对大面二进行实时拍照,检测除漆效果;
21、(e)在步骤(d)中,若视觉检测装置检测到任一面的除漆效果未达到去除要求时,上位机标定该锂电池电芯为再次除漆产品,由搬运组件搬运至传输架上传输至下料位,由机器人抓取到上料位的料框中,再进行除漆,若上位机标定该锂电池电芯三次均为不合格产品,则归入不合格料框;被标定为合格的产品均归入合格料框中,合格料框装满后由传输机构传输至下一工序。
22、在所述步骤(c)和步骤(d)中,激光能量功率计通过推杆调整位置,正对激光振镜,实时检测激光振镜的功率,同时反馈给上位机,当功率不在特定范围内时,上位机控制激光振镜调整其输出功率。
23、本发明的有益效果是:
24、(1)本发明的承载翻转机构可以实现锂电池电芯6个面的翻转,使得清洗集中在该位置处,简化整个装置的结构;
25、(2)由于清洗集中设置,所以沿传输架的一侧设置至少2个承载翻转机构,而激光机构设置成沿这些承载翻转机构移动,在对前一个承载翻转机构上锂电池电芯清洗作业即将完成的同时,后一个承载翻转机构进行上料,前一个完成清洗后沿x轴移动即可对后一个承载翻转机构上的锂电池电芯进行清洗,节省时间;
26、(3)承载翻转机构设置在工作台上,在其周围开设落尘口,由除尘机构由下抽走,不会使去除物落到传输架上影响传输性能;
27、(4)除尘机构的除尘管设置成除尘总管和除尘支管,且除尘总管为变径管,其靠近除尘器的部分直径最大,如此设置,保证除尘总管不会堵住而影响除尘效果;
28、(5)正对激光振镜的工作台上设置激光能量功率计,实时监测激光振镜的功率,及时调整,以保证去除效果;
29、(6)本发明方法清洗的同时实时检测,可以实时了解锂电池电芯哪个面或哪几个面没有达标,进而可进行二次甚至三次针对性清洗,保证高的良品率。
本文地址:https://www.jishuxx.com/zhuanli/20240618/12871.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表