一种考虑驾驶员驾驶习惯的个性化换道轨迹规划方法
- 国知局
- 2024-08-02 16:33:28
本发明属于智能车辆轨迹规划领域,具体涉及一种考虑驾驶员驾驶习惯的个性化换道轨迹规划方法。
背景技术:
1、车辆换道是常见驾驶任务之一,也是引起交通事故的主要原因之一。因此,换道操作成为智能汽车轨迹规划的研究重点。
2、车辆决策与规划是智能驾驶辅助系统的重要组成部分,其性能与车辆行驶的安全性、稳定性与舒适性密切相关。换道轨迹规划主要涉及车辆状态、道路边界、交通环境与车辆动力学约束等方面,然而现有的轨迹规划方式主要以汽车安全性为核心目标,较少考虑驾驶员行为习惯因素,导致智能系统进行换道操作时,规划的轨迹不符合驾驶员驾驶习惯从而引起紧张与不适,降低驾驶员对智能汽车的驾驶体验。
3、因此,有必要在规划安全的换道轨迹的同时,考虑驾驶员因素,规划符合驾驶员驾驶习惯的个性化换道轨迹,以降低人机冲突,提高驾驶员对智能驾驶系统的接受度。
技术实现思路
1、针对上述技术的不足,本发明公开一种考虑驾驶员驾驶习惯的个性化换道轨迹规划方法,在保证驾驶员安全并稳定完成换道的同时,提高驾驶舒适性,缓解驾驶员与智能车辆之间的冲突。
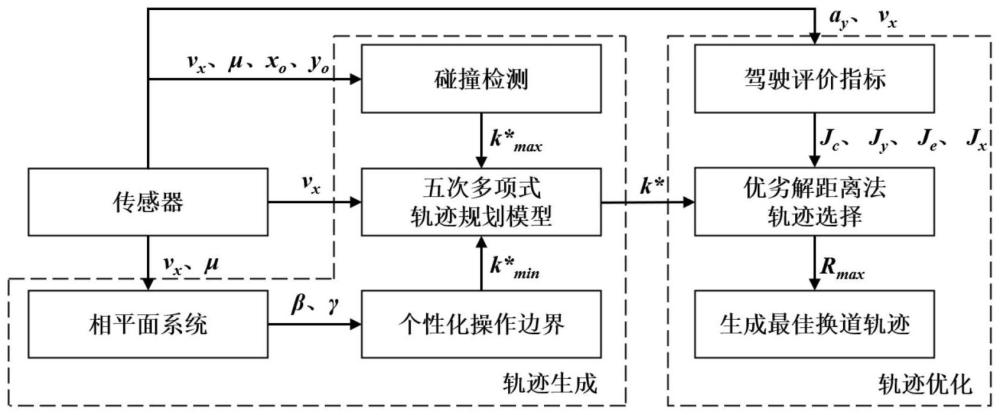
2、一种考虑驾驶员驾驶习惯的个性化换道轨迹规划方法,包括以下步骤:
3、1)采集驾驶员驾驶数据并进行分析,提取出反映驾驶员换道时驾驶习惯的参数——侧向加速度ayh;
4、2)假定车辆换道过程中纵向速度恒定,根据自车和前车的信息,建立五次多项式换道轨迹规划模型:
5、
6、式中,x(t)和y(t)分别表示t时刻车辆在地面坐标系下的质心位置;vx表示车辆纵向行驶速度;w表示车道宽度;τ表示换道时间;
7、对侧向位移求二次导可得侧向加速度表达式为:
8、
9、考虑到换道时间与换道最大侧向加速度为优化目标(换道时间反映换道效率,最大侧向加速反映换道舒适性和安全性),并进行无量纲处理:
10、
11、式中,表示最大侧向加速度;μ表示路面附着系数;g表示重力加速度;τmax为最大换道时间;
12、定义目标函数:
13、
14、式中,w1和w2分别为换道时间和换道最大侧向加速度的权重系数;
15、最小化目标函数后,可定义调节因子为:
16、
17、通过改变调节因子的值,可得到不同的换道轨迹,基于此,生成换道轨迹簇;
18、3)建立二自由度车辆模型:
19、
20、式中,m为整车质量;vx和vy分别代表车辆纵向与横向速度;表示车辆航向角;fxf表示前轮胎纵向力;fyf和fyr分别表示前后轮胎的侧向力;δf为车辆前轮转角;iz为车辆绕z轴的转动惯量;lf和lr分别为车辆质心到前后轴的距离;
21、考虑到车辆前轮转角较小,sinδf≈δf,cosδf≈1,前后轮胎侧偏角可近似于:
22、
23、式中,α1和α2分别为前后轮胎侧偏角;β为车辆质心侧偏角;γ为车辆横摆角速度;
24、前后轮胎侧向力为:
25、
26、式中,k1和k2分别为车辆前后轮胎侧偏刚度;
27、将式(7)(8)带入式(6),车辆动力学方程可简化为:
28、
29、4)搭建轮胎模型,采用魔术轮胎公式:
30、fy(α)=dsin{ctan-1[b(α+sh)-e(b(α+sh)-tan-1(b(α+sh)))]}+sv (10)
31、式中,fy为轮胎侧向力;α为轮胎侧偏角;b、c、d和e为魔术轮胎公式的拟合系数;其中,b为刚度系数,c为曲线形状系数,d为峰值系数,e为曲线曲率因子;sh和sv分别为曲线水平与垂向漂移;
32、由(9)(10)可建立相平面系统:
33、|γ+e1β|≤e2 (11)
34、式中,e1和e2分别为相平面拟合系数;
35、5)根据分析的驾驶参数设计操作边界:
36、由式(6)可知:
37、
38、进行小角度假设即sinδf≈δf,cosδf≈1后可得
39、
40、由于且上式可化简为
41、
42、当趋于0时,车辆处于稳定状态,忽略车辆轮胎纵向力的影响,车辆横摆角速度可表示为:
43、
44、式中,γs表示车辆稳定横摆角速度;
45、二自由度汽车质心绝对加速度沿横向分量为:
46、
47、换道过程中不同驾驶员可接受的最大侧向加速度不同,并对式(16)进行合理化简,基于收集的驾驶员参数设计如下个性化的横摆角速度表达式:
48、
49、式中,γh表示符合驾驶习惯的横摆角速度;
50、综合考虑车辆稳定性约束与驾驶员的驾驶习惯,设计如下的最大横摆角速度:
51、
52、6)通过碰撞检测,约束k*的上限,并对生成的换道轨迹簇进行过滤,选出无碰撞的轨迹簇;
53、7)通过设计的驾驶操作边界,对生成的无碰撞轨迹簇进行进一步的优化,约束k*的下限,即可得到k*的范围,在该范围内可生成无碰撞可行换道轨迹簇;
54、8)设计评价指标:
55、舒适性指标:
56、jc=∫0τay2dt (19)
57、式中,ay表示车辆换道过程中的侧向加速度;
58、转向速率指标:
59、
60、式中,表示车辆换道过程中的侧向加速度变化率;
61、换道效率指标:
62、je=τ (21)
63、换道距离指标:
64、jx=vxτ (22)
65、9)设计优劣解距离算法,对生成的无碰撞可行轨迹进行优化,以生成符合驾驶员习惯的最佳换道轨迹:
66、把所有的指数转化为增益指数(越高越好):
67、n=[1/jc 1/jy 1/je 1/jx] (23)
68、指标向量矩阵:
69、
70、其中
71、数据标准化:
72、
73、m*=(bij)q×4 (26)
74、式中,aij是矩阵m中的元素,bij是矩阵m*中的元素;
75、计算每个指标的权重:
76、w=[wc wy we wx]t (27)
77、式中,wc、wy、we和wx分别为矩阵n中相应元素的权重系数,且有wc+wy+we+wx=1;
78、计算每条轨迹的正负理想距离解:
79、
80、
81、式中,和分别代表每条轨迹到正、负理想解的欧氏距离;hij=wj×bij;和分别为正、负理想解;
82、计算每条轨迹的综合评价指标:
83、
84、10)选择最佳换道轨迹:将所有的轨迹综合评价指标进行降序排序,最大值的即为理想值,相应的轨迹即最佳换道轨迹。
85、本发明的有益效果在于:
86、1、本发明能够基于驾驶员驾驶特征参数生成驾驶员操作边界,约束驾驶员换道过程中的最大侧向加速度,生成较为合适的换道轨迹,使得驾驶员以可接受的侧向冲击完成换道行为。
87、2、通过对换道轨迹添加约束进行优化,可以将驾驶员换道过程中的侧向加速度限制在驾驶员可接受的范围内,引导驾驶员在安全进行换道的同时,提高驾驶舒适性,减少人机冲突。
本文地址:https://www.jishuxx.com/zhuanli/20240718/251278.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表