一种踏板模拟器及其控制方法与流程
- 国知局
- 2024-08-02 16:37:01
本发明涉及自动驾驶,特别涉及一种踏板模拟器及其控制方法。
背景技术:
1、解耦式电控制动助力器包括制动踏板、串联制动主缸以及踏板模拟器,在制动过程中,通过制动踏板、串联制动主缸及踏板模拟器形成制动主缸回路,主要用于实现制动踏板中的踏板力和踏板行程曲线,同时识别驾驶员的制动意图。踏板模拟器与主缸通过油路相连,通过内部弹性元件的压缩释放提供踏板的模拟力。
2、传统的踏板模拟器通过组合弹簧或组合碟簧或两种混合使用,来模拟踏板力-行程特性(踏板感)曲线,具有不同驾驶习惯的人或在不同行驶工况下,驾驶员对制动的舒适性需求不同。要想适应不同的驾驶模式,改变踏板模拟器特性曲线,需要更换全套或部分的踏板模拟器中弹性元件,即必须通过硬件上拆卸更换才能修改适应的驾驶模式,更换硬件的方法繁琐复杂,成本高。
技术实现思路
1、鉴于上述问题,本申请的目的在于提供一种踏板模拟器及其控制方法,通过电机控制第一伸缩组件和第二伸缩组件的伸展以及收缩状态,修改踏板感模拟器特性曲线以适应不同驾驶模式的方法。
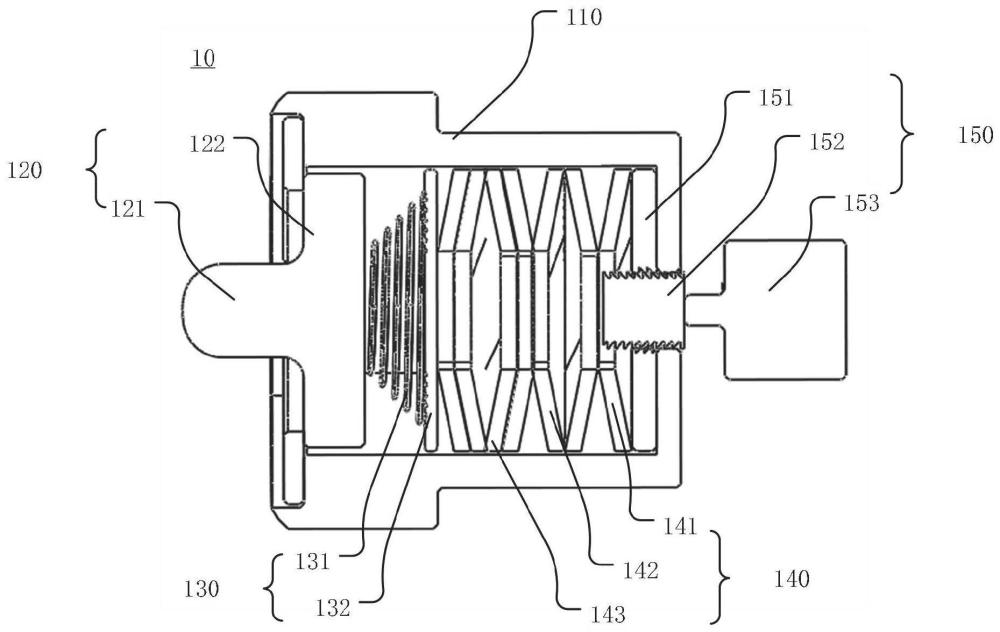
2、根据本发明的一方面,提供一种踏板模拟器,包括:弹性活塞,接收踏板力;第一伸缩组件,所述第一伸缩组件的一端与所述弹性活塞接触;第二伸缩组件,与所述第一伸缩组件远离所述弹性活塞的一端接触;以及调节组件,与所述第二伸缩组件远离所述第一伸缩组件的一端接触;其中,所述第一伸缩组件的弹性系数小于所述第二伸缩组件的弹性系数,所述调节组件用于调整所述第一伸缩组件和所述第二伸缩组件的伸缩状态,以使得所述踏板模拟器以不同的工作模式工作。
3、可选地,还包括壳体,所述第一伸缩组件和所述第二伸缩组件设置于所述壳体内。
4、可选地,所述弹性活塞包括:第一部分;以及与所述第一部分连接的第二部分;所述壳体的第二端的端部设置有第二通孔,所述第一部分的直径小于所述第二通孔的直径,所述第二部分的直径大于所述第二通孔的直径;所述弹性活塞的第二部分设置于所述壳体内,且与所述第一伸缩组件接触,所述第一部分远离所述第二部分的一端通过所述第二通孔,延伸至所述壳体的外部;所述弹性活塞的第一部分接收踏板力。
5、可选地,所述第一伸缩组件包括:截锥弹簧,所述截锥弹簧的一端与所述弹性活塞接触;以及弹簧底座,与所述截锥弹簧远离所述弹性活塞的一端接触;其中,所述弹簧底座与所述截锥弹簧接触的一侧表面设置有与所述截锥弹簧匹配的凹槽。
6、可选地,所述第二伸缩组件包括组合在一起的第一碟簧、第二碟簧以及第三碟簧,第一碟簧、第二碟簧以及第三碟簧的弹性系数依次增大;其中,所述第三碟簧与所述弹簧底座远离所述截锥弹簧的一侧表面接触。
7、可选地,所述外壳的第一端的端部开设有第一通孔,其实多数所述外壳的第一端和第二端相对;所述调节组件包括:压板,与所述第二伸缩组件远离所述弹簧底座的一端与压板接触,所述压板的中心的开设有螺纹孔;丝杆,所述丝杆的一端穿设于所述压板的螺纹孔中,另一端穿过所述壳体的第一通孔,延伸至所述壳体的外部;以及电机,设置于所述壳体的外部,与所述丝杆远离所述压板的一端固定连接;其中,所述电机带动所述丝杆旋转,进而带动所述压板沿着所述丝杆的轴向滑动。
8、根据本发明的另一方面,提供一种踏板模拟器的控制方法,所述踏板模拟器包括:弹性活塞,接收踏板力;第一伸缩组件,所述第一伸缩组件的一端与所述弹性活塞接触;第二伸缩组件,与所述第一伸缩组件远离所述弹性活塞的一端接触;以及调节组件,与所述第二伸缩组件远离所述第一伸缩组件的一端接触;所述控制方法包括:所述调节组件接收驾驶模式选择信号,并且根据接收的驾驶模式选择信号调整所述第一伸缩组件和所述第二伸缩组件的伸缩状态,以使得所述踏板模拟器以不同的工作模式工作。
9、可选地,所述调节组件接收第一驾驶模式选择信号时,所述调节组件调整所述第一伸缩组件和所述第二伸缩组件的伸缩状态,使得所述第一伸缩组件和所述第二伸缩组件均未被压缩,所述踏板模拟器以第一工作模式工作。
10、可选地,所述调节组件接收第二驾驶模式选择信号时,所述调节组件调整所述第一伸缩组件和所述第二伸缩组件的伸缩状态,使得所述第一伸缩组件被完全压并,所述第二伸缩组件未被压缩,所述踏板模拟器以第二工作模式工作。
11、可选地,所述调节组件接收第三驾驶模式选择信号时,所述调节组件调整所述第一伸缩组件和所述第二伸缩组件的伸缩状态,使得所述第一伸缩组件被完全压并,所述第二伸缩组件受力预紧,所述踏板模拟器以第三工作模式工作。
12、本申请的踏板模拟器,通过电机控制第一伸缩组件和第二伸缩组件的伸展以及收缩状态,修改踏板模拟器特性曲线以适应不同驾驶模式的方法,可直接通过电机控制实现踏板模拟器特性曲线的改变,极大地简化了踏板模拟器适应驾驶员特性、行驶工况等需求的过程。解决了现有解耦式电控制动助力器踏板模拟器不能通过软件调节适应驾驶模式的问题,通过本发明踏板模拟器切换驾驶模式后,提高了不同驾驶习惯人驾驶过程中的舒适度,改善了极端驾驶工况下的驾驶安全性。
技术特征:1.一种踏板模拟器,包括:
2.根据权利要求1所述的踏板模拟器,其中,还包括壳体,所述第一伸缩组件和所述第二伸缩组件设置于所述壳体内。
3.根据权利要求2所述的踏板模拟器,其中,所述弹性活塞包括:
4.根据权利要求2所述的踏板模拟器,其中,所述第一伸缩组件包括:
5.根据权利要求2所述的踏板模拟器,其中,所述第二伸缩组件包括组合在一起的第一碟簧、第二碟簧以及第三碟簧,第一碟簧、第二碟簧以及第三碟簧的弹性系数依次增大;
6.根据权利要求2所述的踏板模拟器,其中,所述外壳的第一端的端部开设有第一通孔,其实多数所述外壳的第一端和第二端相对;
7.一种踏板模拟器的控制方法,所述踏板模拟器包括:
8.根据权利要求7所述的方法,其中,所述调节组件接收第一驾驶模式选择信号时,所述调节组件调整所述第一伸缩组件和所述第二伸缩组件的伸缩状态,使得所述第一伸缩组件和所述第二伸缩组件均未被压缩,所述踏板模拟器以第一工作模式工作。
9.根据权利要求7所述的方法,其中,所述调节组件接收第二驾驶模式选择信号时,所述调节组件调整所述第一伸缩组件和所述第二伸缩组件的伸缩状态,使得所述第一伸缩组件被完全压并,所述第二伸缩组件未被压缩,所述踏板模拟器以第二工作模式工作。
10.根据权利要求7所述的方法,其中,所述调节组件接收第三驾驶模式选择信号时,所述调节组件调整所述第一伸缩组件和所述第二伸缩组件的伸缩状态,使得所述第一伸缩组件被完全压并,所述第二伸缩组件受力预紧,所述踏板模拟器以第三工作模式工作。
技术总结本申请公开了一种踏板模拟器及其控制方法。踏板模拟器包括:弹性活塞,接收踏板力;第一伸缩组件,所述第一伸缩组件的一端与所述弹性活塞接触;第二伸缩组件,与所述第一伸缩组件远离所述弹性活塞的一端接触;以及调节组件,与所述第二伸缩组件远离所述第一伸缩组件的一端接触;其中,所述第一伸缩组件的弹性系数小于所述第二伸缩组件的弹性系数,所述调节组件用于调整所述第一伸缩组件和所述第二伸缩组件的伸缩状态,以使得所述踏板模拟器以不同的工作模式工作。技术研发人员:王冠杰,袁亮,张勇,班浩受保护的技术使用者:长沙汽车创新研究院技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240718/251604.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表