爬壁机器人、其磁吸轮组及其自适应控制方法与流程
- 国知局
- 2024-08-02 16:37:00
本发明涉及爬壁机器人,尤其是涉及一种爬壁机器人、其磁吸轮组及其自适应控制方法。
背景技术:
1、磁吸轮组在爬壁机器人的作业中占有基础性的重要地位。在传统的爬壁机器人的设计中,往往采用不可调的固定式磁吸轮组。因此,为了爬壁机器人可以跨越不同壁面所形成的夹角,设计人员需要针对不同应用场景的爬壁特种机器人设计不同排布方式的磁吸轮组。同时,固定式的磁吸轮组为了适应爬壁机器人前进、后退等不同行进方式。无法在提供前进方向磁吸力的同时,去除阻碍爬壁机器人运动的磁吸力,在没有外力提供且遭遇接近直角的内折角障碍的情况时,无法主动去除来自原平面的磁吸力,使之无法完成内折角障碍的跨越动作。而额外所需的外力,就增加了爬壁机器人运动控制系统的复杂性,同时也降低了系统的可靠性。
技术实现思路
1、为此,本发明所要解决的技术问题在于提供一种爬壁机器人、其磁吸轮组及其自适应控制方法,能够改变磁吸力方法,使爬壁机器人完成内折角的跨越动作。
2、为了解决上述技术问题,本发明提供一种爬壁机器人的磁吸轮组,包括:
3、车轮组件,所述车轮组件绕其转动轴线旋转并用于与工作壁面滚动接触;
4、磁铁组件,所述磁铁组件用于与工作壁面磁吸,所述磁铁组件具有用于朝向爬壁机器人行走方向前方的前端和用于朝向爬壁机器人行走方向后方的后端;
5、旋转驱动设备,所述旋转驱动设备用于带动所述磁铁组件绕所述车轮组件的转动轴线旋转;
6、磁吸力检测组件,所述磁吸力检测组件包括第一力传感器和第二力传感器,所述第一力传感器用于实时检测所述磁铁组件的前端与工作壁面之间的第一当前磁吸力,所述第二力传感器用于实时检测所述磁铁组件的后端与工作壁面之间的第二当前磁吸力。
7、进一步地,还包括内折角检测组件,所述内折角检测组件用于识别爬壁机器人是否正在跨越内折角。
8、进一步地,所述内折角检测组件包括接近传感器。
9、进一步地,所述内折角检测组件包括视觉传感器。
10、进一步地,所述旋转驱动设备为伺服电机。
11、本发明还提供一种爬壁机器人,包括控制系统和所述的磁吸轮组,所述控制系统用于根据所述第一力传感器和所述第二力传感器的检测结果控制所述旋转驱动设备旋转。
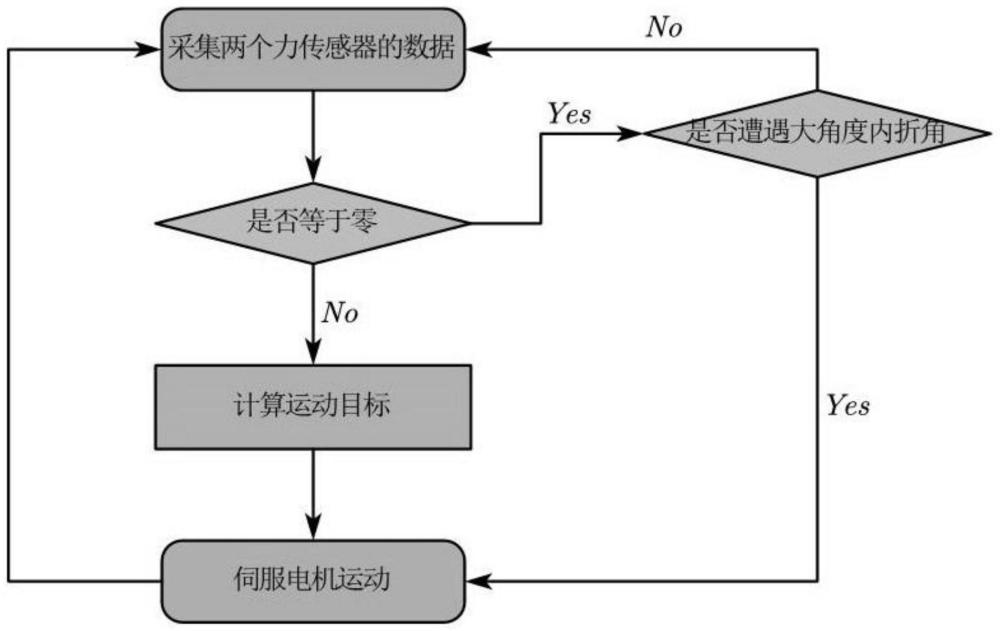
12、本发明还提供一种爬壁机器人的自适应控制方法,所述自适应控制方法如下:所述控制系统控制爬壁机器人在工作壁面上行走并实时采集所述第一当前磁吸力和所述第二当前磁吸力和实时计算二者的磁吸力差值,当所述磁吸力差值不为零时,所述控制系统控制所述旋转驱动设备旋转以使所述第一当前磁吸力和所述第二当前磁吸力的磁吸力差值为零。
13、进一步地,通过如下步骤计算所述旋转驱动设备的目标位置:
14、首先,所述控制系统根据如下公式和所述磁吸力差值计算所述磁铁组件需要偏转的角度并根据所述旋转驱动设备的当前位置和所述磁铁组件的初始零度位置计算所述磁铁组件的当前位置,
15、
16、其中,relative angle为所述磁铁组件需要偏转的角度;
17、kp为比例增益系数,取值范围为0.01-0.5;
18、e为磁吸力差值;
19、ki为积分增益系数,取值范围为0.001-0.02;
20、kd为微分增益系数,取值范围为0.005-1;
21、为e的变化率;
22、其次,所述控制系统根据所述磁铁组件的当前位置和所述磁铁组件需要偏转的角度计算所述旋转驱动设备的目标位置。
23、本发明提供另一种爬壁机器人,其特征在于,包括控制系统和任一所述的磁吸轮组,所述控制系统用于根据所述第一力传感器、所述第二力传感器以及所述内折角检测组件的检测结果控制所述旋转驱动设备旋转。
24、本发明提供另一种爬壁机器人的自适应控制方法,所述爬壁机器人为所述的爬壁机器人,所述自适应控制方法如下:所述控制系统控制爬壁机器人在工作壁面上行走并实时采集所述第一当前磁吸力和所述第二当前磁吸力和实时计算二者的磁吸力差值,当所述磁吸力差值为零且所述内折角检测组件感知到所述爬壁机器人正在跨越内折角时,所述控制系统控制所述旋转驱动设备绕与所述车轮组件旋转方向相反的方向探索式旋转直至所述磁吸力差值再次变为零。
25、本发明的上述技术方案相比现有技术具有以下优点:
26、1)本发明所述的爬壁机器人、其磁吸轮组及其自适应控制方法,通过设置旋转驱动设备、第一力传感器以及第二力传感器,根据第一力传感器和第二力传感器的检测到的磁吸力差值来判断爬壁机器人是否遇到较小内折角,如果遇到较小内折角,则控制磁铁组件的旋转,主动自适应地调整磁吸力方向,主动去除来自原平面的磁吸力,最大程度地适应爬壁机器人当前的运动状态,使得磁吸轮组可以在主动地提供前进所需磁吸力时,去除阻碍前进的磁吸力,帮助爬壁机器人顺利并快速地通过各种不同的壁面障碍。因此,不需要依靠外力克服阻碍运动的磁吸力,降低了爬壁机器人运动控制系统的复杂性;
27、2)本发明所述的爬壁机器人、其磁吸轮组及其自适应控制方法,在遇到较大内折角时,无法通过磁吸力差值来判断是否遇到内折角,通过设置内折角检测组件,此时通过内折角检测组件的配合可以识别出爬壁机器人遇到较大内折角,如果遇到较大内折角,则控制磁铁组件的旋转,主动自适应地调整磁吸力方向,使得爬壁机器人更顺畅的完成较大内折角的跨越;
28、3)本发明所述的爬壁机器人、其磁吸轮组及其自适应控制方法,通过将内折角检测组件设置为包括接近传感器,可以检测到爬壁机器人行走时前方是否有内折角且检测可靠性较高;
29、4)本发明所述的爬壁机器人、其磁吸轮组及其自适应控制方法,通过将内折角组件设置为包括视觉传感器,可以检测到爬壁机器人行走时前方是否有内折角且检测适应性较广。
技术特征:1.一种爬壁机器人的磁吸轮组,其特征在于,包括:
2.根据权利要求1所述的磁吸轮组,其特征在于,还包括内折角检测组件,所述内折角检测组件用于识别爬壁机器人是否正在跨越内折角。
3.根据权利要求2所述的磁吸轮组,其特征在于,所述内折角检测组件包括接近传感器。
4.根据权利要求2所述的磁吸轮组,其特征在于,所述内折角检测组件包括视觉传感器。
5.根据权利要求1所述的磁吸轮组,其特征在于,所述旋转驱动设备为伺服电机。
6.一种爬壁机器人,其特征在于,包括控制系统和权利要求1至5任一所述的磁吸轮组,所述控制系统用于根据所述第一力传感器和所述第二力传感器的检测结果控制所述旋转驱动设备旋转。
7.一种爬壁机器人的自适应控制方法,所述爬壁机器人为权利要求6所述的爬壁机器人,其特征在于,所述自适应控制方法如下:所述控制系统控制爬壁机器人在工作壁面上行走并实时采集所述第一当前磁吸力和所述第二当前磁吸力和实时计算二者的磁吸力差值,当所述磁吸力差值不为零时,所述控制系统控制所述旋转驱动设备旋转以使所述第一当前磁吸力和所述第二当前磁吸力的磁吸力差值为零。
8.根据权利要求7所述的自适应控制方法,其特征在于,通过如下步骤计算所述旋转驱动设备旋转的目标位置:
9.一种爬壁机器人,其特征在于,包括控制系统和权利要求2至4任一所述的磁吸轮组,所述控制系统用于根据所述第一力传感器、所述第二力传感器以及所述内折角检测组件的检测结果控制所述旋转驱动设备旋转。
10.一种爬壁机器人的自适应控制方法,所述爬壁机器人为权利要求9所述的爬壁机器人,其特征在于,所述自适应控制方法如下:所述控制系统控制爬壁机器人在工作壁面上行走并实时采集所述第一当前磁吸力和所述第二当前磁吸力和实时计算二者的磁吸力差值,当所述磁吸力差值为零且所述内折角检测组件感知到所述爬壁机器人正在跨越内折角时,所述控制系统控制所述旋转驱动设备绕与所述车轮组件旋转方向相反的方向探索式旋转直至所述磁吸力差值再次变为零。
技术总结本发明公开了一种爬壁机器人的磁吸轮组和自适应控制方法,磁吸轮组包括车轮组件、磁铁组件、旋转驱动设备以及磁吸力检测组件,车轮组件绕其转动轴线旋转并用于与工作壁面滚动接触,磁铁组件用于与工作壁面磁吸,磁铁组件具有用于朝向爬壁机器人行走方向前方的前端和用于朝向爬壁机器人行走方向后方的后端,旋转驱动设备用于带动磁铁组件绕车轮组件的转动轴线旋转,磁吸力检测组件包括第一力传感器和第二力传感器,第一力传感器用于实时检测磁铁组件的前端与工作壁面之间的第一当前磁吸力,第二力传感器用于实时检测磁铁组件的后端与工作壁面之间的第二当前磁吸力。本发明能够主动自适应地调整磁吸力方向,主动去除来自原平面的磁吸力。技术研发人员:岳荣康,张志伟,包佳伟,王宝玉,陈磊,刘勋受保护的技术使用者:上海镌极特种设备有限公司技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240718/251600.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表