基于神经网络的自动驾驶汽车改进MPC轨迹跟踪控制方法
- 国知局
- 2024-08-02 16:37:47
本发明涉及自动驾驶汽车运动控制,尤其涉及一种基于神经网络的自动驾驶汽车改进mpc轨迹跟踪控制方法。
背景技术:
1、自动驾驶汽车技术作为当今汽车工业领域的热点之一,旨在提高行车安全性、舒适性和效率。其中,模型预测控制(model predictive control,mpc)作为一种先进的控制策略,已经在自动驾驶汽车的轨迹跟踪问题中得到广泛应用。然而,在实际应用中,由于车辆动力学模型的复杂性以及诸多未建模的非线性因素,传统的mpc控制方法在提高轨迹跟踪精度方面仍然存在一定的局限性。
2、传统的mpc控制方法通常基于线性化的车辆动力学模型进行设计,而忽略了诸如轮胎侧向力与侧滑角、纵向力与纵向滑移比之间的非线性关系。这些未建模的非线性因素会导致控制器在实际场景中的性能下降,影响自动驾驶汽车的轨迹跟踪效果。
3、考虑到非线性因素的影响,非线性模型预测控制(nonlinear model predictivecontrol,nmpc)应运而生。nmpc控制器采用了非线性轮胎模型,能够反映轨迹跟踪中复杂的轮胎力响应,与传统的线性mpc控制器相比,nmpc控制器能够更好地处理车辆动力学模型中的非线性因素。通过采用更为精确的非线性轮胎模型,nmpc控制器能够更准确地预测车辆在不同工况下的动态响应,从而提高轨迹跟踪的稳定性和精度。然而,nmpc仍然面临不确定性干扰和模型简化的模型误差,这会导致车辆的跟踪精度降低的问题。
4、为了解决模型误差的问题,目前已有的解决方案主要有以下三种:
5、(1)开发更高精度的轮胎模型,以更好地捕捉轮胎特征。然而,由于模型的复杂性,在解决控制问题时,这种方法计算时间会出现重大的挑战。
6、(2)利用神经网络学习车辆动力学。然而,这种方法并不有效的利用先前的物理知识和车辆运动过程中生成的数据,因此,该模型可能会在一些不常见的情况下发生重大误差。
7、(3)将神经网络模型与输入历史相结合来实现,这个方法利用了物理定律的先验知识,然而,这种方法缺乏证明神经网络输出的稳定性。
8、以上背景技术内容的公开仅用于辅助理解本发明的构思及技术方案,其并不必然属于本专利申请的现有技术,在没有明确的证据表明上述内容在本专利申请的申请日已经公开的情况下,上述背景技术不应当用于评价本技术的新颖性和创造性。
技术实现思路
1、为解决上述技术问题,本发明提出一种基于神经网络的自动驾驶汽车改进mpc轨迹跟踪控制方法,利用神经网络对车辆动力学模型进行自适应补偿,以提高对未建模非线性因素的建模能力,有效地集合了先验的物理知识和车辆的现有模型,从而提高轨迹跟踪精度。
2、为了达到上述目的,本发明采用以下技术方案:
3、第一方面,本发明公开了一种基于神经网络的自动驾驶汽车改进mpc轨迹跟踪控制方法,其特征在于,包括以下步骤:
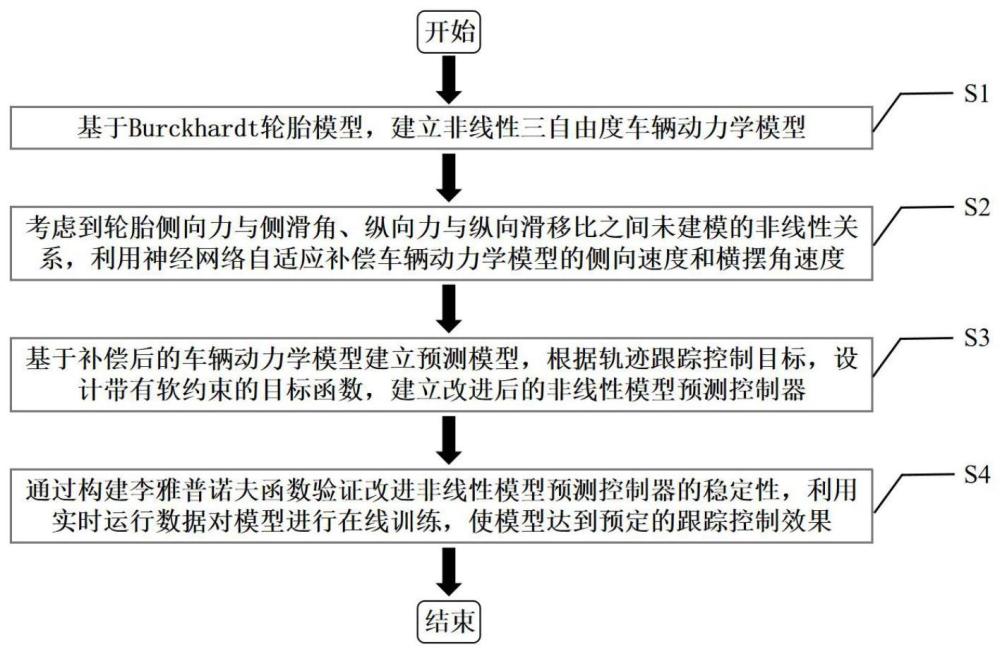
4、s1:建立非线性三自由度车辆动力学模型;
5、s2:基于轮胎的侧向力与侧滑角、纵向力与纵向滑移比之间的非线性关系,利用神经网络自适应补偿所述非线性三自由度车辆动力学模型的侧向速度和横摆角速度;
6、s3:基于自适应补偿后的所述非线性三自由度车辆动力学模型建立预测模型,根据轨迹跟踪控制目标,设计带有软约束的目标函数,建立改进后的非线性模型预测控制器;
7、s4:利用实时运行数据对改进后的所述非线性模型预测控制器进行在线训练,使所述非线性模型预测控制器达到预设的跟踪控制效果。
8、优选地,步骤s2中的神经网络的输入ωin,2×1为:
9、
10、δvy=vy_real-vy_predic
11、
12、其中,vy_real是实际车辆侧向速度,vy_predic是所述非线性三自由度车辆动力学模型预测的车辆侧向速度,δvy为实际车辆侧向速度与预测的车辆侧向速度之差,是实际车辆横摆角速度,是所述非线性三自由度车辆动力学模型预测的车辆横摆角速度,为实际车辆横摆角速度与预测的车辆横摆角速度之差;
13、步骤s2中的神经网络的输出ωout,2×1为:
14、
15、其中,σ1为侧向速度补偿量,σ2为横摆角速度补偿量。
16、优选地,步骤s2中的神经网络包括输入层、隐藏层和输出层,其中各层之间为全连接层,输入层维数为2,隐藏层节点数为n,输出层维数为2,网络映射关系为:
17、
18、其中,ωin,2×1为神经网络的输入,φn,2×n表示第n个隐藏节点到输出层的权重向量,为2×n维向量,λn,n×2表示输入层到第n个隐藏节点的权重向量,为n×2维向量,ξn,n×1为第n个隐藏节点的偏置,为n×1维向量,ωout,2×1为神经网络的输出,g为激活函数,其中激活函数设置为sigmoid函数,g(λn,n×2,ξn,n×1,ωout,2×1)的表达式为:
19、
20、优选地,步骤s3中基于自适应补偿后的所述非线性三自由度车辆动力学模型建立的预测模型为:
21、
22、其中,k表示第k个离散点,k+i表示第k+i个离散点,η(k+i|k)表示根据第k个状态量预测得到的第k+i个状态量,η(k+i-1|k)表示根据第k个状态量预测得到的第k+i-1个状态量,η为状态量,包括质心坐标(x,y)、纵向速度vx、横向速度vy、车身航向角横摆角速度六个状态参数序列为控制量,包括纵向加速度ax、前轮转角δ控制参数序列[ax,δ]t;γ为输出量,包括质心坐标(x,y)、纵向速度vx、横向速度vy、车身航向角横摆角速度六个状态参数序列σ1为侧向速度补偿量,σ2为横摆角速度补偿量,为步骤s1建立的所述非线性三自由度车辆动力学模型。
23、优选地,步骤s3中根据轨迹跟踪控制目标,设计的带有软约束的目标函数包括:
24、设计目标函数jβ1为:
25、
26、其中,表示根据第k个状态值预测得到的第k+i个状态值,表示基于第k个规划状态值得到的第k+i个规划状态值,η为状态量,包括质心坐标(x,y)、纵向速度vx、横向速度vy、车身航向角横摆角速度六个状态参数序列为控制量,包括纵向加速度ax、前轮转角δ控制参数序列[ax,δ]t;nc为预测时域,x、y为质心坐标,vx、vy为纵向速度和横向速度,为车身航向角,为横摆角速度,xref、yref为期望轨迹坐标,vxref、vyref为期望纵向速度和横向速度,为期望道路航向,为期望道路航向变化率,p表示状态量权重矩阵,p=diag(p1,p2,p3,p4,p5,p6);
27、软约束jβ2为:
28、
29、其中,tc表示控制时域,q表示控制变化量权重矩阵,q=diag(q1,q2),ax为纵向加速度,δ为控制量,表示控制变化量序列;
30、带有软约束的目标函数jβ为:
31、
32、其中ρ表示权重系数,ε表示松弛因子。
33、优选地,其中软约束中的控制量ax和控制量δ的约束条件包括:
34、axmin(t+ty)≤ax(t+ty)≤axmax(t+ty),ty=0,1,2...,tc-1
35、δaxmin(t+ty)≤δax(t+ty)≤δaxmax(t+ty),ty=0,1,2...,tc-1
36、δmin(t+ty)≤δ(t+ty)≤δmax(t+ty),ty=0,1,2...,tc-1
37、δδmin(t+ty)≤δδ(t+ty)≤δδmax(t+ty),ty=0,1,2...,tc-1
38、其中,t表示当前时刻t,t+ty表示t+ty时刻。
39、优选地,步骤s4中在利用实时运行数据对改进后的所述非线性模型预测控制器进行在线训练的步骤之前,还包括通过构建李雅普诺夫函数验证改进非线性模型预测控制器的稳定性。
40、优选地,通过构建李雅普诺夫函数验证改进非线性模型预测控制器的稳定性具体包括:
41、李雅普诺夫函数b(k)设置如下:
42、
43、δb(k)=b(k+1)-b(k)
44、
45、
46、δφ=φ(k+1)-φ(k)
47、其中,δb(k)为李雅普诺夫函数b(k)的变化量,e(k)为跟踪误差,为预测模型的状态估计值,η(k)为实际状态值,为神经网络输出权重向量误差,φ*为理想的输出权重向量,φ(k)为实际的输出权重向量,为大于0的常量;
48、当δb(k)<0,b(k)>0时,改进非线性模型预测控制器是渐近稳定的。
49、优选地,步骤s4的神经网络的输出权重向量更新的步骤如下:
50、δφ=φ(k+1)-φ(k)=τ(e(k+1)-fe*e(k))*θt
51、其中,τ是学习率,θ表示g(λn,n×2,ξn,n×1,ωout,2×1),θt表示g(λn,n×2,ξn,n×1,ωout,2×1)的转置,fe为大于0且小于1的参数。
52、第二方面,本发明公开了一种存储介质,所述存储介质中存储有计算机程序,其中,所述计算机程序被设置为可被一处理器运行以执行第一方面所述的基于神经网络的自动驾驶汽车改进mpc轨迹跟踪控制方法。
53、与现有技术相比,本发明的有益效果在于:本发明针对自动驾驶汽车的轨迹跟踪控制问题,提出了一种基于神经网络的自动驾驶汽车改进mpc轨迹跟踪控制方法,其中提出基于非线性三自由度车辆动力学方程的mpc,相对于基于二自由度车辆动力学方程的mpc而言,可以适应更复杂的工况,具有更高的轨迹跟踪精度。而且,基于神经网络的自动驾驶汽车改进mpc,相对于基于非线性三自由度车辆动力学方程的nmpc而言,提高了预测模型的精度,从而提高了轨迹跟踪的精度。同时,本发明设计的神经网络不需要大量的数据进行在线训练,可利用车辆运行的实时数据进行在线训练。因此,本发明利用神经网络对车辆动力学模型进行自适应补偿,提高了对未建模非线性因素的建模能力,有效地集合了先验的物理知识和车辆的现有模型,从而提高轨迹跟踪精度。
本文地址:https://www.jishuxx.com/zhuanli/20240718/251663.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表