一种轨迹控制方法、系统及介质与流程
- 国知局
- 2024-08-02 16:50:58
本发明涉及智能驾驶领域,尤其是涉及一种轨迹控制方案、系统及介质。
背景技术:
1、智能驾驶的高速发展大背景下,车道居中控制功能,对于旁车道压线行驶车辆、车辆缓慢切入、静止压线障碍物以及大型车辆等场景很难权衡出躲避时机和躲避的距离,单纯不变的系统控制会对不同的驾驶员造成不同的感受。
2、智能驾驶轨迹规划功能的核心任务是解决车辆在复杂交通环境中的行驶路径问题。为实现有效的轨迹规划,系统需考虑多方面信息,包括拓扑地图、障碍物及其预测轨迹、交通信号灯状态,以及车辆的定位导航和状态等。
3、然而,传统轨迹规划方法未考虑到驾驶员的潜意识修正或期望,而驾驶员的个体驾驶风格千差万别,因而现有智能驾驶配置的离线方案难以满足驾驶员对行车意图的实时调整。
技术实现思路
1、鉴于以上所述的现有技术的缺点,本发明的目的是提供一种轨迹控制方法、系统及介质,可以减少不合理的制动情况,增加个性化、安全的、智能的人机共驾方案。
2、为实现上述目的,本发明采用如下技术方案。
3、第一方面,本发明提供的一种轨迹控制方法,采用如下的技术方案:
4、一种轨迹控制方法,包括:
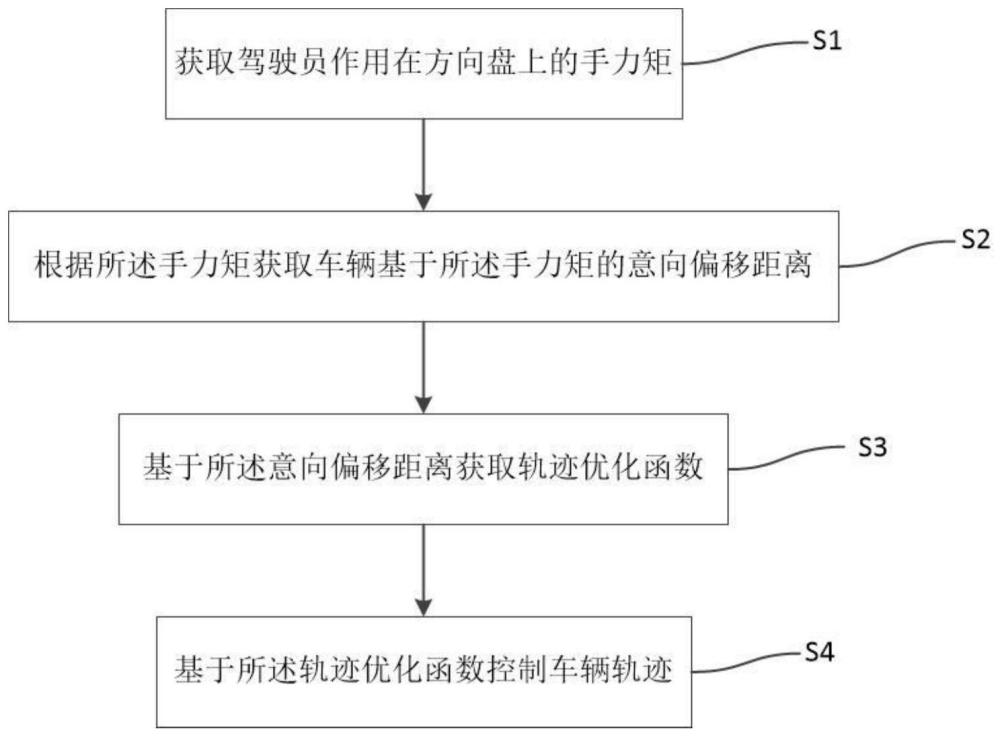
5、获取驾驶员作用在方向盘上的手力矩;
6、根据所述手力矩获取车辆基于所述手力矩的意向偏移距离;
7、基于所述意向偏移距离获取轨迹优化函数;
8、以及,基于所述轨迹优化函数控制车辆轨迹。
9、进一步的,上述的一种轨迹控制方法中,所述根据所述手力矩获取车辆基于所述手力矩的意向偏移距离,包括:
10、通过离线学习方式得到手力矩与车辆的横向偏移距离之间的映射关系;
11、将驾驶员作用在方向盘上的手力矩输入所述映射关系,得到对应的横向偏移距离即为当前驾驶员的意向偏移距离。
12、进一步的,上述的一种轨迹控制方法中,所述基于所述意向偏移距离获取轨迹优化函数,包括:
13、基于所述意向偏移距离和参考线横向位置,计算车辆实际横向位置的横向偏移的平方误差;对所述横向偏移的平方误差进行求和生成所述轨迹优化函数。
14、进一步的,上述的一种轨迹控制方法中,所述基于所述意向偏移距离获取轨迹优化函数,还包括:
15、计算车辆实际横向位置的横向偏移的二阶导数的平方误差。
16、进一步的,上述的一种轨迹控制方法中,所述基于所述意向偏移距离获取轨迹优化函数,还包括:
17、计算车辆实际横向位置的横向偏移的三阶导数的平方误差。
18、进一步的,上述的一种轨迹控制方法中,对所述横向偏移的平方误差设置第一权重参数,对所述横向偏移的二阶导数的平方误差设置第二权重参数,对所述横向偏移的三阶导数的平方误差设置第三权重参数。
19、进一步的,上述的一种轨迹控制方法中,所述第一权重参数设计为hmi的输入,用以允许驾驶员通过人机接口调整所述第一权重参数。
20、第二方面,本发明提供的一种轨迹控制系统,采用如下的技术方案:
21、一种轨迹控制系统,包括:
22、力矩获取模块,至少用于获取驾驶员作用在方向盘上的手力矩;
23、意向偏移距离生成模块,至少用于根据所述手力矩获取车辆基于所述手力矩的意向偏移距离;轨迹优化模块,至少用于基于所述意向偏移距离获取轨迹优化函数;
24、车辆控制模块,至少用于基于所述轨迹优化函数控制车辆轨迹。
25、进一步的,上述的一种轨迹控制系统中,还包括:
26、hmi输入模块,至少用于获取驾驶员输入的权重参数。
27、第三方面,本发明提供的一种可读存储介质,采用如下的技术方案:
28、一种可读存储介质,所述可读存储介质存储有计算机指令,所述计算机指令被处理器执行时实现如上述第一方面中任一项所述的一种轨迹控制方法。
29、综上所述,与现有技术相比,本发明包括以下至少一种有益技术效果:
30、1、通过在轨迹规划中引入驾驶员手力矩,并允许其通过权重参数调整个性化驾驶风格,实现了更符合驾驶员意图和偏好的个性化智能驾驶;
31、2、将轨迹优化的权重参数作为hmi输入,让驾驶员实现安全范围内的个性化智驾风格。
技术特征:1.一种轨迹控制方法,其特征在于,包括:
2.根据权利要求1所述的一种轨迹控制方法,其特征在于,所述根据所述手力矩获取车辆基于所述手力矩的意向偏移距离,包括:
3.根据权利要求1所述的一种轨迹控制方法,其特征在于,所述基于所述意向偏移距离获取轨迹优化函数,包括:
4.根据权利要求3所述的一种轨迹控制方法,其特征在于,所述基于所述意向偏移距离获取轨迹优化函数,还包括:
5.根据权利要求3所述的一种轨迹控制方法,其特征在于,所述基于所述意向偏移距离获取轨迹优化函数,还包括:
6.根据权利要求3-5中任意一项所述的一种轨迹控制方法,其特征在于,对所述横向偏移的平方误差设置第一权重参数,对所述横向偏移的二阶导数的平方误差设置第二权重参数,对所述横向偏移的三阶导数的平方误差设置第三权重参数。
7.根据权利要求6所述的一种轨迹控制方法,其特征在于,所述第一权重参数设计为hmi的输入,用以允许驾驶员通过人机接口调整所述第一权重参数。
8.一种轨迹控制系统,其特征在于,包括:
9.根据权利要求8所述的一种轨迹控制系统,其特征在于,所述系统还包括:
10.一种可读存储介质,其特征在于,所述可读存储介质存储有计算机指令,所述计算机指令被处理器执行时实现如权利要求1-7中任一项所述的一种轨迹控制方法。
技术总结本发明涉及一种轨迹控制方法、系统及介质,涉及智能驾驶领域,所述方法包括获取驾驶员作用在方向盘上的手力矩;根据所述手力矩获取车辆基于所述手力矩的意向偏移距离;基于所述意向偏移距离获取轨迹优化函数;以及,基于所述轨迹优化函数控制车辆轨迹。本发明可以减少不合理的制动情况,增加个性化、安全的、智能的人机共驾方案。技术研发人员:柏东冰,贺锦鹏,杨毅受保护的技术使用者:智己汽车科技有限公司技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240718/252734.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表