驱动模块的制作方法
- 国知局
- 2024-08-02 16:57:27
本公开涉及一种驱动模块(driving module),并且更具体地,涉及一种包括设置在一侧的一对输入轴的驱动模块,其中,当每个输入轴以相同速度在相反方向上旋转时,与每个输入轴接合并联接的一对齿轮旋转,以使筒体能够独立旋转,从而选择性地使车辆能够横向行进。
背景技术:
1、近年来,随着移动机器人应用领域的扩大,人们对移动机器人的期望水平增加,并且存在例如协助残疾人、病人、老年人的服务机器人以及存在需要在复杂、狭窄的环境中执行各种任务的机器人。
2、通常,在许多工业现场成功应用和使用的移动机器人大多由两个独立的驱动轮机构或转向驱动机构驱动,并且传统机器人的运动受到很多限制。
3、例如,就服务机器人而言,当由机器人辅助的人打算在任意方向上移动时,机器人可能因为自身的限制而干扰人的移动,而要使机器人在狭窄的地方旋转或转弯,则需要机器人移动到较大的空间或沿复杂的路线移动。
4、因此,全向移动机器人正在研究中,并且因为通过提高移动机器人的运动能力,全向机器人可以在二维平面内沿三个自由度(前后、左右以及旋转)移动,所以移动机器人可以沿任意方向行进而不改变轮子的姿势,并且目前,各种类型的轮子,例如包括麦克纳姆轮(mecanum wheel)的全向轮,可以用于全向移动机器人。
5、然而,传统的麦克纳姆轮由于结构困难而难以制造为注塑一体结构,并且此外,因为传统的麦克纳姆轮具有沿每个驱动轮产生的力的矢量和的方向移动的结构,所以存在的问题在于只有当驱动区域中的摩擦力均匀时才可能正常操作,并且动力损失率较大。
6、本公开的背景技术中包括的信息仅用于增强对本公开的一般背景技术的理解,并且不能被视为对该信息形成本领域技术人员已知的现有技术的承认或任何形式的暗示。
技术实现思路
1、本公开的各个方面旨在提供一种驱动模块,该驱动模块包括设置在车轮的一侧上的一对输入轴,其中,当每个输入轴以相同速度在相同方向上旋转时,通过与每个输入轴接合并联接的一对齿轮使筒体的旋转停止,以使车辆能够通过壳体横向行进,并且当每个输入轴以相同速度在不同方向上旋转时,通过一对齿轮使筒体旋转,不仅可以使车辆能够纵向行进,而且可以选择性地使车辆能够横向行进。
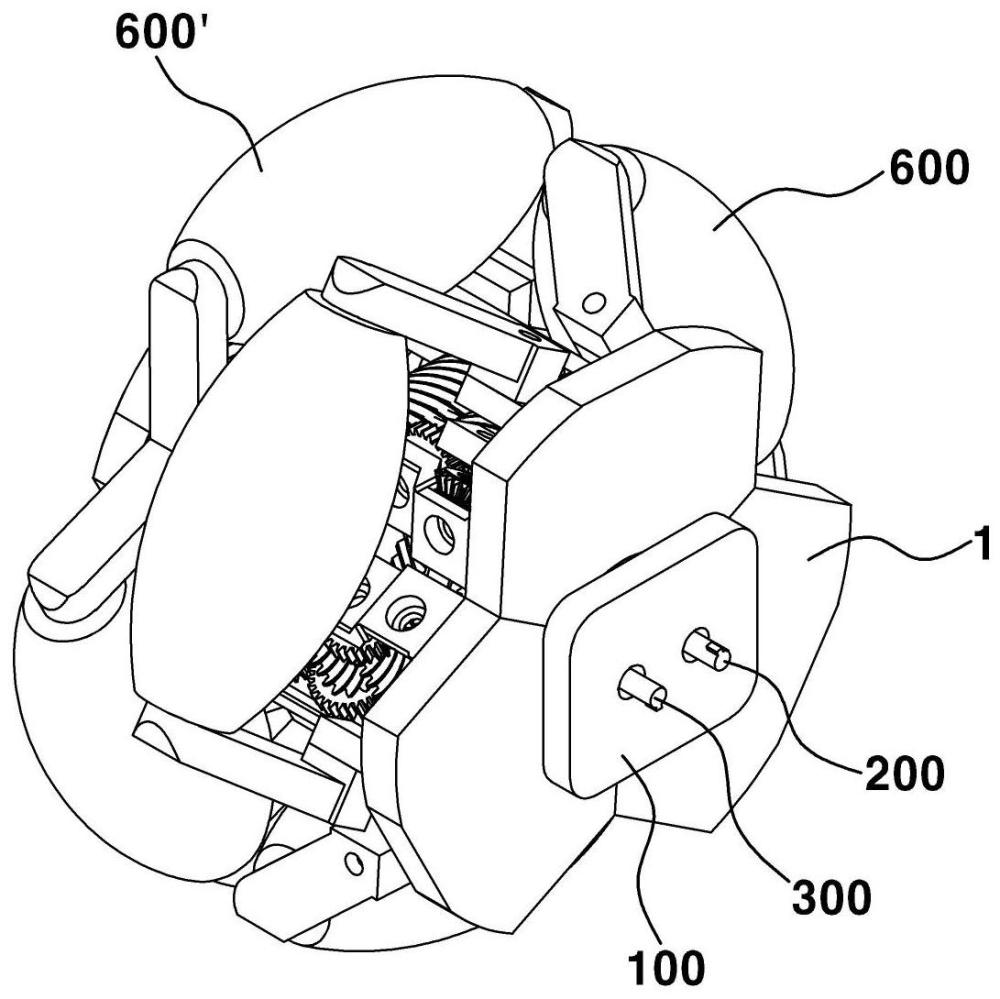
2、根据本公开的示例性实施例的驱动模块包括:壳体,绕转向节单元可旋转地支撑;筒体单元,由壳体可旋转地支撑;第一旋转输入单元和第二旋转输入单元,由转向节单元可旋转地支撑;第一齿轮单元,与第一旋转输入单元接合,以将从第一旋转输入单元输入的旋转力传递到壳体或筒体单元;第二齿轮单元,与第二旋转输入单元和第一齿轮单元接合,以将从第二旋转输入单元输入的旋转力传递到壳体或筒体单元;以及控制器,被配置为彼此独立地控制第一旋转输入单元和第二旋转输入单元的旋转,以选择性地旋转壳体或筒体单元,使得车辆在所有方向上可移动。
3、此处,第一旋转输入单元可以包括第一旋转输入轴、固定到第一旋转输入轴的第一正齿轮(spur gear)、以及与第一正齿轮接合的第一环形齿轮(ring gear)。
4、类似地,第二旋转输入单元可以包括第二旋转输入轴、固定到第二旋转输入轴的第二正齿轮、以及与第二正齿轮接合的第二环形齿轮。
5、此外,可以选择性地调节第一旋转输入单元和第二旋转输入单元的旋转方向和旋转速度。
6、此外,当第一旋转输入单元和第二旋转输入单元以相同速度在相反方向上旋转时,壳体的旋转可以被固定,并且只有筒体单元可以旋转。
7、此外,当第一旋转输入单元和第二旋转输入单元以相同速度在相同方向上旋转时,筒体单元的旋转可以被固定,并且只有壳体可以旋转。
8、此外,当第一旋转输入单元和第二旋转输入单元以不同的速度旋转时,筒体单元和壳体可以一起旋转。
9、另一方面,筒体单元可以包括连接到第一齿轮单元以旋转的第一筒体部和连接到第二齿轮单元以旋转的第二筒体部。
10、第一筒体部可以包括由壳体的第一侧可旋转地支撑的多个筒体,并且第二筒体部可以包括由壳体的第二侧可旋转地支撑的多个筒体。
11、此外,第一筒体部和第二筒体部可以被设置为绕壳体的旋转轴线在壳体的圆周方向上彼此相交,并且可以在壳体旋转时彼此相交并可以连续地与地接触。
12、此外,第一筒体部和第二筒体部可以在相同方向上旋转。
13、另一方面,第一齿轮单元可包括:多个1-1齿轮,包括连接到第一旋转输入单元的第一侧和与第二齿轮单元接合的第二侧;多个1-2齿轮,与多个1-1齿轮接合;多个锥齿轮(bevel gear),与多个1-2齿轮接合,并设置为改变待传递到筒体单元的旋转力的方向;以及多个连接带,连接多个锥齿轮的滑轮和筒体单元的滑轮。
14、此处,多个1-1齿轮和多个1-2齿轮可以由壳体可旋转地支撑。
15、此外,第二齿轮单元可包括:多个2-1齿轮,包括连接到第二旋转输入单元的第一侧和与第一齿轮单元接合的第二侧;多个2-2齿轮,与多个2-1齿轮接合;以及多个连接带,连接多个2-2齿轮的滑轮和筒体单元的滑轮。
16、多个2-1齿轮和多个2-2齿轮可以由壳体可旋转地支撑。
17、另一方面,驱动模块可以进一步包括:致动器,设置在转向节单元的一侧,并被构造成将扭矩传递到第一旋转输入单元和第二旋转输入单元。
18、根据本公开的示例性实施例,可以提供设置在车轮的一侧上的一对输入轴,其中,当每个输入轴以相同速度在相同方向上旋转时,可以通过与每个输入轴接合并联接的一对齿轮使筒体的旋转停止,以使车辆能够通过壳体横向行进,并且当每个输入轴以相同速度在不同方向上旋转时,可以通过一对齿轮使筒体旋转,不仅可以使车辆能够纵向行进,而且可以选择性地使车辆能够横向行进。
19、因此,根据本公开的示例性实施例,可以省去纵向行进和横向行进的分开的车轮旋转空间,提高乘员区域的利用率,并且可以采用车身遮挡轮罩的设计,也提高了空气动力性能。
20、此外,根据本公开的示例性实施例,因为动力可以仅通过设置在车轮一侧上的一对输入轴来传递,所以可以采用紧凑的结构,从而减少部件的数量并有利于车辆安装。
21、应当理解的是,术语“汽车”或“车辆”或者本文使用的其他类似术语包括通用汽车,诸如包括运动型多用途汽车(操作suv)、公共汽车、卡车、各种商用汽车的乘用车辆,包括各种小船和轮船的船只,飞机等,并且还包括混合动力汽车、电动汽车、插电式混合动力电动汽车、氢动力汽车和其他替代燃料汽车(例如,源自石油以外资源的燃料)。如本文所述,混合动力汽车是具有两个或多个动力源的汽车,例如汽油动力和电动汽车。
22、本公开的上述和其他特征将在下文讨论。
23、本公开的方法和设备具有其他特征和优点,这些特征和优点将从并入本文的附图与下文的具体实施方式中明显或更详细地阐述,附图和具体实施方式一起用于解释本公开的特定原理。
技术特征:1.一种驱动模块,包括:
2.根据权利要求1所述的驱动模块,其中,所述第一旋转输入单元包括:
3.根据权利要求1所述的驱动模块,其中,所述第二旋转输入单元包括:
4.根据权利要求1所述的驱动模块,其中,所述第一旋转输入单元和所述第二旋转输入单元的旋转方向和旋转速度被选择性地调节。
5.根据权利要求1所述的驱动模块,其中,当所述第一旋转输入单元和所述第二旋转输入单元以相同速度在相反方向上旋转时,所述壳体的旋转被固定,并且只有所述筒体单元旋转。
6.根据权利要求1所述的驱动模块,其中,当所述第一旋转输入单元和所述第二旋转输入单元以相同速度在相同方向上旋转时,所述筒体单元的旋转被固定,并且只有所述壳体旋转。
7.根据权利要求1所述的驱动模块,其中,当所述第一旋转输入单元和所述第二旋转输入单元以不同速度旋转时,所述筒体单元和所述壳体一起旋转。
8.根据权利要求1所述的驱动模块,其中,所述筒体单元包括:
9.根据权利要求8所述的驱动模块,其中,
10.根据权利要求8所述的驱动模块,其中,所述第一筒体部和所述第二筒体部被设置为绕所述壳体的旋转轴线在所述壳体的圆周方向上彼此相交,在所述壳体旋转时彼此相交,并且连续地与地接触。
11.根据权利要求8所述的驱动模块,其中,所述第一筒体部与所述第二筒体部在相同方向上旋转。
12.根据权利要求1所述的驱动模块,其中,所述第一齿轮单元包括:
13.根据权利要求12所述的驱动模块,其中,所述多个1-1齿轮和所述多个1-2齿轮由所述壳体可旋转地支撑。
14.根据权利要求12所述的驱动模块,其中,所述多个锥齿轮形成为一对锥齿轮以60°的角度彼此接合并联接的结构。
15.根据权利要求1所述的驱动模块,其中,所述第二齿轮单元包括:
16.根据权利要求15所述的驱动模块,其中,所述多个2-1齿轮和所述多个2-2齿轮由所述壳体可旋转地支撑。
17.根据权利要求1所述的驱动模块,进一步包括:致动器,设置在所述转向节单元的一侧,并被构造成将扭矩传递到所述第一旋转输入单元和所述第二旋转输入单元。
技术总结本公开涉及一种驱动模块,其包括:壳体,绕转向节单元可旋转地支撑;筒体单元,由壳体可旋转地支撑;第一旋转输入单元和第二旋转输入单元,由转向节单元可旋转地支撑;第一齿轮单元,与第一旋转输入单元接合,以将从第一旋转输入单元输入的旋转力传递到壳体或筒体单元;第二齿轮单元,与第二旋转输入单元和第一齿轮单元接合,以将从第二旋转输入单元输入的旋转力传递到壳体或筒体单元;以及控制器,被配置为彼此独立地控制第一旋转输入单元和第二旋转输入单元的旋转,以选择性地旋转壳体或筒体单元,使得车辆在所有方向上可移动。技术研发人员:黄祥羽,金玟夋,成儁昊,朴佑根,张世铉,孙荣日受保护的技术使用者:现代自动车株式会社技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240718/253208.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表