飞行器空中对接装置及方法与流程
- 国知局
- 2024-08-01 05:45:51
本申请涉及飞行器空中对接,特别涉及一种飞行器空中对接装置。本申请同时涉及一种飞行器空中对接方法、一种计算设备,以及一种计算机可读存储介质。
背景技术:
1、空中对接技术最早由空中加油需求而产生,逐步被应用于多个领域。如空中加油、无人机对接回收、飞行器空中互操作等,对于航空航天领域的发展有着十分重要的作用。当前,空中对接技术已经应用到多个领域并发展出多种形式,其具体的对接装置可以分为软式对接和硬式对接两种方式。
2、现有技术中,空中对接技术主要以软式对接装置为主,硬式对接装置为辅。本质上看,软式对接装置以软管和锥套为核心结构,整体为被动式的对接,极易受到复杂气流环境的干扰导致对接的失败。硬式对接装置则具有更好的稳定性,在较为恶劣的飞行环境中能够一定程度上抵抗气流扰动,然而硬式对接装置存在控制精度要求高、灵活度不足的问题。所以,无论软式对接装置或者硬式对接装置都属于被动式的对接装置,这对飞行器的控制技术要求较高,现有对接装置无法满足快速、高效、可靠的对接需求。
技术实现思路
1、有鉴于此,本申请实施例提供了一种飞行器空中对接装置,以解决现有技术中存在的技术缺陷。本申请实施例同时提供了一种飞行器空中对接方法,一种计算设备,以及一种计算机可读存储介质。
2、根据本申请实施例的第一方面,提供了一种飞行器空中对接装置,包括:
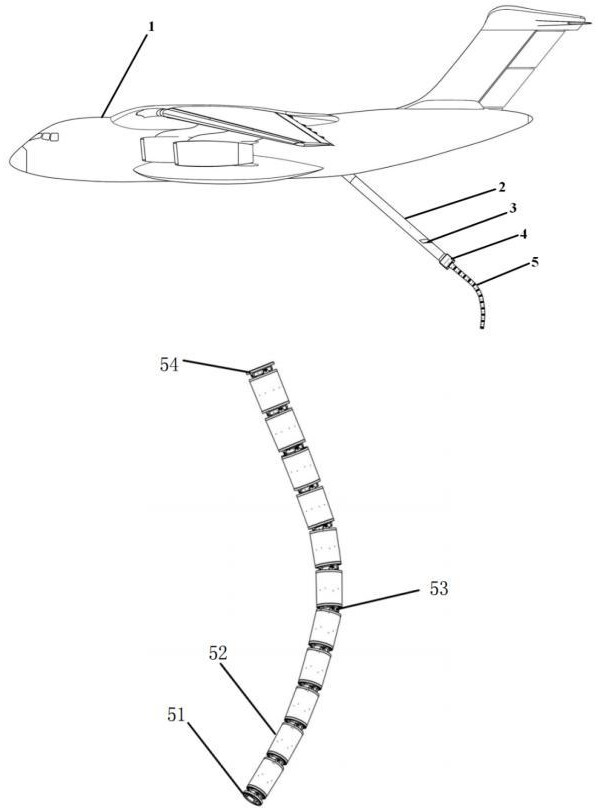
3、硬式连接杆2,其一端铰接于载体飞行器1,另一端为自由端,硬式连接杆的自由端连接机械臂控制箱4,其中硬式连接杆2上设置了升降舵3,升降舵3控制硬式连接杆2的俯仰姿态;
4、机械臂控制箱4,其一端链接硬式连接杆2,另一端连接柔性机械臂5,机械臂控制箱4内部包含的驱动部件和牵引绳索,所述牵引绳索从机械臂控制箱4中延伸至柔性机械臂5,结合所述驱动部件控制柔性机械臂5的运动姿态与刚度;
5、柔性机械臂5,包含末端组件51、固定组件54以及至少两个单元关节52,其中末端组件51上设置了多传感器系统和对接口,所述多传感器系统采集环境信息以及柔性机械臂5的位姿信息,末端组件51与柔性机械臂5末尾端的单元关节52相连,相邻两个单元关节52之间由万向节53连接,固定组件54一端与柔性机械臂5起始端的单元关节52相连,另一端与机械臂控制箱4相连。
6、可选地,所述硬式连接杆2与载体飞行器1的铰接点采用全向铰接方式进行铰接。
7、可选地,所述柔性机械臂5上设置的所述多传感器系统与机械臂控制箱4电连接,所述多传感器系统采集的环境信息与柔性机械臂5的位姿信息,通过电信号形式传输至机械臂控制箱4。
8、可选地,所述机械臂控制箱4基于所述环境信息与所述位姿信息,通过所述驱动部件对所述牵引绳索的长度进行调整。
9、可选地,所述柔性机械臂5上设置的对接口包括磁力组件与卡扣组件,所述磁力组件通过磁吸方式与待对接飞行器的待对接口进行对接,所述卡扣组件在对接后闭锁。
10、可选地,所述机械臂控制箱4,在载体飞行器1与待对接飞行器对接后,通过所述驱动部件释放所述牵引绳索。
11、根据本申请实施例的第二方面,提供了一种飞行器空中对接方法,包括:
12、步骤s301,控制载体飞行器1与待对接飞行器飞行姿态一致;
13、步骤s302,释放硬式连接杆2,末端组件51对所述待对接飞行器的对接口进行识别,得到位置数据,并采集环境数据;
14、步骤s303,根据所述位置数据与所述环境数据,通过机械臂控制箱4调整柔性机械臂5的运动姿态与刚度,将载体飞行器1与所述待对接飞行器进行对接。
15、可选地,所述末端组件51对所述待对接飞行器的对接口进行识别,得到位置数据,并采集环境数据之后还包括:
16、根据所述位置数据与所述环境数据,判断是否满足对接条件;
17、若是,执行步骤s303;
18、若否,根据所述位置数据与所述环境数据,通过升降舵3调整硬式连接杆2的俯仰姿态,执行判断是否满足对接条件步骤。
19、可选地,所述步骤s303中,所述将载体飞行器1与所述待对接飞行器进行对接之后还包括:
20、机械臂控制箱4通过所述驱动部件释放所述牵引绳索。
21、根据本申请实施例的第三方面,提供了一种计算设备,包括:
22、存储器和处理器;
23、所述存储器用于存储计算机可执行指令,所述处理器执行所述计算机可执行指令时实现所述飞行器空中对接方法的步骤。
24、根据本申请实施例的第四方面,提供了一种计算机可读存储介质,其存储有计算机可执行指令,该指令被处理器执行时实现所述飞行器空中对接方法的步骤。
25、根据本申请实施例的第五方面,提供了一种芯片,其存储有计算机程序,该计算机程序被芯片执行时实现所述飞行器空中对接方法的步骤。
26、本申请提供的飞行器空中对接装置,包含硬式连接杆2,其一端铰接于载体飞行器1,另一端为自由端,硬式连接杆的自由端连接机械臂控制箱4,其中硬式连接杆2上设置了升降舵3,升降舵3控制硬式连接杆2的俯仰姿态;机械臂控制箱4,其一端链接硬式连接杆2,另一端连接柔性机械臂5,机械臂控制箱4内部包含的驱动部件和牵引绳索,所述牵引绳索从机械臂控制箱4中延伸至柔性机械臂5,结合所述驱动部件控制柔性机械臂5的运动姿态与刚度;柔性机械臂5,包含末端组件51、固定组件54以及至少两个单元关节52,其中末端组件51上设置了多传感器系统和对接口,所述多传感器系统采集环境信息以及柔性机械臂5的位姿信息,末端组件51与柔性机械臂5末尾端的单元关节52相连,相邻两个单元关节52之间由万向节53连接,固定组件54一端与柔性机械臂5起始端的单元关节52相连,另一端与机械臂控制箱4相连,可以实现环境数据的采集以确定对接环境,并根据不同的对接环境,实时改变柔性机械臂的姿态,实现智能化的自主对接,有效解决了人工对接和传统对接的难度高、效率低、可靠性差等问题。
技术特征:1.一种飞行器空中对接装置,其特征在于,包括:
2.如权利要求1所述的飞行器空中对接装置,其特征在于,所述硬式连接杆(2)与载体飞行器(1)的铰接点采用全向铰接方式进行铰接。
3.如权利要求1所述的飞行器空中对接装置,其特征在于,所述柔性机械臂(5)上设置的所述多传感器系统与机械臂控制箱(4)电连接,所述多传感器系统采集的环境信息与柔性机械臂(5)的位姿信息,通过电信号形式传输至机械臂控制箱(4)。
4.如权利要求3所述的飞行器空中对接装置,其特征在于,所述机械臂控制箱(4)基于所述环境信息与所述位姿信息,通过所述驱动部件对所述牵引绳索的长度进行调整。
5.如权利要求1所述的飞行器空中对接装置,其特征在于,所述柔性机械臂(5)上设置的对接口包括磁力组件与卡扣组件,所述磁力组件通过磁吸方式与待对接飞行器的待对接口进行对接,所述卡扣组件在对接后闭锁。
6.根据权利要求1所述的飞行器空中对接装置,其特征在于,所述机械臂控制箱(4),在载体飞行器(1)与待对接飞行器对接后,通过所述驱动部件释放所述牵引绳索。
7.一种飞行器空中对接方法,其特征在于,包括:
8.根据权利要求7所述的方法,其特征在于,所述步骤s302中,所述末端组件(51)对所述待对接飞行器的对接口进行识别,得到位置数据,并采集环境数据之后,还包括:
9.根据权利要求7所述的方法,其特征在于,所述步骤s303中,所述将载体飞行器(1)与所述待对接飞行器进行对接之后,还包括:
技术总结本申请提供飞行器空中对接装置及方法,其中所述飞行器空中对接装置包括:硬式连接杆一端铰接于载体飞行器,另一端连接机械臂控制箱,其中硬式连接杆上设置了升降舵;机械臂控制箱一端链接硬式连接杆,另一端连接柔性机械臂,机械臂控制箱内部包含的驱动部件和牵引绳索,所述牵引绳索从机械臂控制箱中延伸至柔性机械臂;柔性机械臂,包含末端组件、固定组件以及至少两个单元关节,末端组件与柔性机械臂末尾端的单元关节相连,相邻两个单元关节之间由万向节连接,固定组件一端与柔性机械臂起始端的单元关节相连,另一端与机械臂控制箱相连。实现根据不同的对接环境,实时改变柔性机械臂的姿态,实现智能化的自主对接。技术研发人员:徐明兴,林锐,林冰轩,李晓龙,陈志刚,王梓伊受保护的技术使用者:中国空气动力研究与发展中心计算空气动力研究所技术研发日:技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240722/221292.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表