一种超低轨卫星搭载的返回式飞行器与控制方法
- 国知局
- 2024-08-01 05:49:24
本发明属于飞行器设计,具体涉及一种超低轨卫星搭载的返回式飞行器与控制方法。
背景技术:
1、传统的返回式飞行器通常由仪器舱、返回舱、服务舱组成,具备完整的测控、姿轨控、推进、电源(含太阳帆板)等分系统,成本较高。其上搭载的载荷可分为两类,一类希望能够进行长时间的在轨实验,另一类无需进行长时间实验,经历短期在轨后返回回收即可完成实验任务。返回式飞行器在轨期间为了降低成本,采用推力器进行姿态控制,在轨工作时间长,则会消耗更多的燃料;在返回时又要进行化学发动机制动,消耗大量燃料,代价高昂。
2、近年来随着电推技术的发展,超低轨卫星的实现成为可能。超低轨道卫星一般是指运行在轨道高度300km以下150km以上的卫星,在此轨道部署卫星,可大幅缩短载荷与地面的作用距离,从而提升载荷工作效能,降低卫星研制和发射成本。
3、如果使用超低轨卫星携带返回式的飞行器,将传统返回式飞行器需要长期搭载进行实验的部分可布置在超低轨卫星上,其需要返回回收的部分布置在返回式飞行器上,则既可以完成长期在轨卫星的任务,又可以低成本且便捷的完成返回式飞行器的任务,大大降低返回式飞行器的成本。
技术实现思路
1、针对现有技术的不足,本发明提出了一种超低轨卫星搭载的返回式飞行器与控制方法,将返回式飞行器搭载在超低轨卫星平台上,利用超低轨卫星平台,实现低成本、高性能的任务飞行。
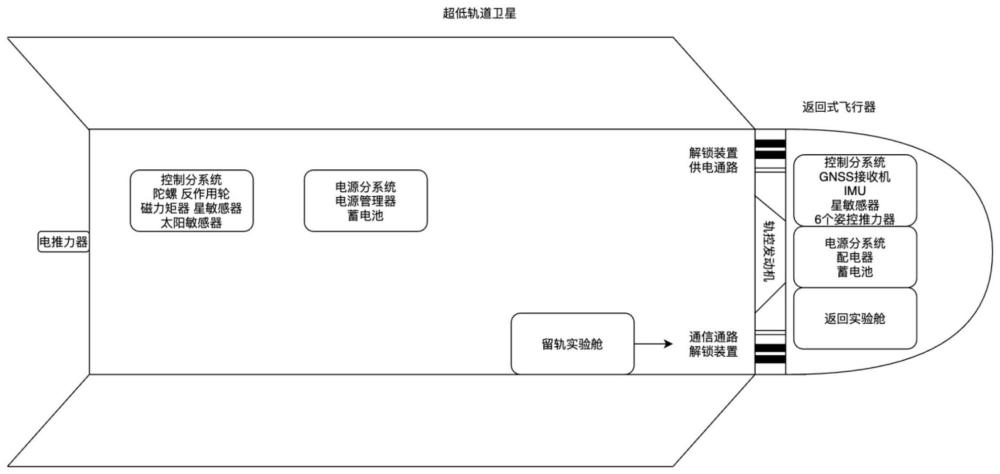
2、一种超低轨卫星搭载的返回式飞行器,包括超低轨卫星平台与返回式飞行器。
3、所述超低轨卫星平台包括卫星平台和留轨实验舱,其中,留轨实验舱搭载在卫星平台上,进行长时间的在轨实验。
4、所述返回式飞行器包括飞行器平台和返回式实验舱,其中,返回式实验舱搭载在返回式飞行器上,随着飞行器平台制动、再入,完成短时实验后返回地面。
5、所述超低轨卫星平台与返回式飞行器通过解锁装置连接,形成组合体,超低轨卫星平台通过供电通路给返回式飞行器供电。所述组合体依靠超低轨卫星平台的电推力在轨道内飞行,开展在轨实验任务。在分离点响应地面指令,解锁装置解锁,超低轨卫星平台与返回式飞行器分离,两者之间的供电通路同步断开;组合体分离后,超低轨卫星依靠推进分系统返回超低轨轨道飞行,继续执行长期在轨任务;返回式飞行器依靠推进分系统瞄准100km高度轨道再入点进行自适应制导,同时开展短时实验,完成实验后返回地面。
6、作为优选,所述卫星平台和飞行器平台均包括独立的综合电子分系统、结构与机构分系统、测控分系统、姿轨控分系统、推进分系统、电源及总体电路分系统和热控分系统。
7、作为优选,所述综合电子分系统包括gnss接收机和星载计算机,结构与机构分系统用于设计减阻外形。
8、作为优选,所述卫星平台的姿轨控分系统包括陀螺、星敏、反作用动量轮、磁力矩器和太敏,推进分系统采用电推进,电源及总体电路分系统包括电源控制器、蓄电池、太阳翼电池阵。
9、作为优选,所述飞行器平台的姿轨控分系统包括惯性组件imu和星敏,推进分系统包括6个姿控推力器和1个化推轨控推力器,电源及总体电路分系统包括电源控制器和蓄电池。
10、一种超低轨卫星搭载的返回式飞行器的控制方法,具体包括以下步骤:
11、步骤1、返回式飞行器搭载在超低轨卫星平台上,一同进入高度500km的低轨轨道,留轨实验舱与返回式实验舱开展低轨在轨试验。然后超低轨卫星平台依靠电推进,与返回式飞行器一同进入高度250km的超低轨轨道,留轨实验舱与返回式实验舱开展超低轨在轨试验。
12、步骤2、当返回式实验舱完成实验后,超低轨卫星平台依靠电推进与返回式飞行器一同进入返回式飞行器的制动轨道,根据地面指令,在满足升交点和轨道倾角条件时,返回式飞行器与超低轨卫星平台分离。
13、步骤3、与超低轨卫星平台分离后,返回式飞行器在制动点使用姿控推力器完成制动姿态的调整,使用化推轨控推力器瞄准100km高度轨道的再入点进行自适应制导,完成制动。超低轨卫星平台根据任务要求,使用电推进返回超低轨轨道。
14、作为优选,超低轨卫星平台依靠电推进与返回式飞行器由超低轨轨道一同进入返回式飞行器的制动轨道的方法为:
15、考虑推力、j2摄动和大气阻力作用,建立超低轨卫星平台在极坐标系中的运动模型:
16、
17、其中,分别表示一次导数、二次导数,μ为地球引力常数,θ为极角,γ为飞行路径角,ta为推力加速度幅度,δ为相对于水平面的推力点角,aj2,ar和aj2,a⊥分别表示j2摄动加速度沿径向和横向的分量,adrag,ar和adrag,a⊥分别表示大气阻力加速度沿径向和横向的分量,r为径向矢量幅度:
18、
19、其中,真近点角f1=f10+θ,真近点角f2=f1-△ω,△ω=ω2-ω1,f10为超低轨轨道机动位置的初始真近点角,θ是以初始位置为参考的转移角,e为轨道偏心率,ω为近地点幅角,下标“1”、“2”分别代表超低轨轨道和返回式飞行器制动轨道。将半长轴a3、a4表示为六次多项式:
20、
21、其中系数(α0,α1,α2)由超低轨轨道中的初始位置确定,系数(β0,β1,β2)由制动轨道中的目标位置确定,系数(α4,α5,α6,β4,β5,β6)由β3确定。
22、假设超低轨卫星平台在给定固定时间tfixed内由初始位置转移至目标位置,利用黄金割线方法迭代求解β3:
23、
24、其中,β3的迭代初始值为β3,0=0和a2为制动轨道的半长轴,θf为最终转移角。
25、由于超低轨卫星平台的径向速度横向速度因此超低轨卫星平台的飞行路径角径向矢量幅度的一阶导数和二阶导数分别为:
26、
27、结合公式(1)并考虑使用正切推力δ=γ,可求得角速度和角加速度进一步求得推力加速度为:
28、
29、其中,a=1-r2(aj2,ar+adrag,ar-aj2,a⊥tanγ-adrag,a⊥tanγ)。
30、因此超低轨卫星平台所需速度增量△v为:
31、
32、通过公式(7)实时计算超低轨卫星平台在不同轨道高度时对应的速度增量,并控制超低轨卫星平台的动作,以克服大气摄动以及轨控实施的误差,消除其不利影响,达到较高轨控精度。
33、本发明具有以下有益效果:
34、1、返回式飞行器搭载在超低轨道卫星平台上,超低轨道卫星可以利用其电推力器进行轨道控制,从而长期稳定运行于超低轨轨道,完成轨实验任务。优点是比冲高,且超低轨道卫星所需的燃料成本大大低于传统返回式飞行器的化学推力器所使用的燃料。超低轨道卫星可以在超低轨卫星的轨道上运行,也可以变轨到返回式飞行器返回轨道上,在完成释放返回式飞行器任务后又可以以较低的代价回到其工作轨道上,不影响其正常工作。
35、2、超低轨道卫星具有完备的高精度的姿态控制系统,大功率帆板提供充足的电源,可以为返回式飞行器提供太阳能电源供其在轨实验用,在释放返回式飞行器时通过解锁装置进行分离,因此返回式飞行器在完成在轨实验任务的过程中,无需配备太阳能电池片,反作用轮、磁力矩器等控制部件,与传统返回式飞行器使用喷气推力器进行姿控的方式相比可以保证其更高精度的在轨姿态和充足能源供应。
36、3、一体式的轨控设计,返回式飞行器能够利用超低轨卫星平台以低成本完成大范围变轨,且调整成本更低,又可以比传统返回式飞行器具有更高的变轨精度;更由于超低轨卫星飞行高度低如250km,在释放返回式飞行器更可以降低到180~200km高度,返回式飞行器进行制动时,其化学轨控发动机消耗的燃料大大减少从而降低了成本。如传统返回式飞行器整星按照300kg计算从500km高度降低到200km高度,需要消耗22.9kg化学推进剂,且还没有计入在轨期间姿态控制的燃料消耗,而本技术所设计的方案可以节省这部分燃料。
37、4、专利所描述的返回式飞行器能够利用超低轨卫星平台的轨道机动能力,在指定的时间点,飞行至指定的轨道位置,给返回式飞行器精确再入制导提供轨道保证。
本文地址:https://www.jishuxx.com/zhuanli/20240722/221586.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表