一种挂载在无人机上的光伏板清洁机器人的制作方法
- 国知局
- 2024-08-01 06:14:56
本技术涉及清洁机器人,尤其涉及一种挂载在无人机上的光伏板清洁机器人。
背景技术:
1、光伏板是一种将太阳能转化为电能的设备,通过吸收太阳光产生电荷,从而实现清洁和可再生能源的利用,光伏板广泛应用于太阳能发电站、屋顶太阳能系统等领域,有助于减少化石能源的消耗和环境污染,安装在户外的光伏板表面常常会积累较大的灰尘,若不及时清理,会直接影响光伏发电的效率。
2、在现有技术中,目前市场上已经有清洁光伏板的清洁机器人,但是清洁机器人在对一块光伏板进行清洁后,需要工作人员手动将清洁机器人将转移到另一个光伏板上,导致清洁的效率降低,且需要工作人员频繁的操作,使用上较为不便,为此设计出一种挂载在无人机上的光伏板清洁机器人。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种挂载在无人机上的光伏板清洁机器人。
2、为了实现上述目的,本实用新型采用了如下技术方案:
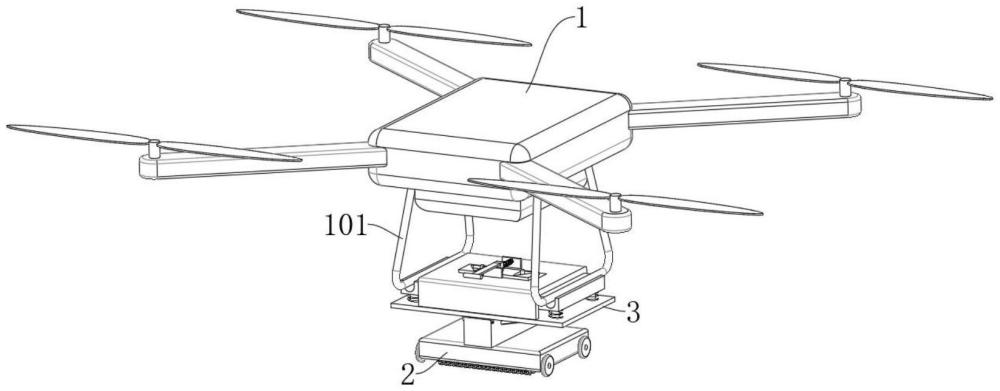
3、一种挂载在无人机上的光伏板清洁机器人,包括连接板和无人机,所述连接板顶部固定连接有u型罩,所述u型罩内壁之间滑动连接有升降板,所述升降板底部四个拐角处均固定连接有滑杆,同侧两个所述滑杆底部均滑动贯穿连接板固定连接有同一个限位板,四个所述滑杆位于连接板顶部的圆周表面均套设有第一弹簧,所述升降板顶部位于u型罩外侧均开设有弧形卡孔,所述升降板顶部位于u型罩内侧处开设有凹槽,所述u型罩顶部中间位置开设有矩形孔,所述矩形孔初步设置有限位机构,所述限位机构包括有固定连接在矩形孔内壁两侧之间固定连接有同一个限位杆,所述限位杆圆周表面对称滑动套设有两个滑动块,两个所述滑动块上均开设有与限位杆相适配的圆孔,两个所述滑动块底部均固定连接有卡板,两个所述卡板与凹槽相适配,所述限位杆位于两个滑动块之间圆周表面套设有第二弹簧,两个所述滑动块顶部均固定连接有凸块。
4、作为本实用新型的进一步方案,所述限位机构还包括有分别固定连接在u型罩顶部位于矩形孔两侧的两个竖板,两个所述竖板之间固定连接有同一个连杆,所述连杆圆周表面滑动套设有矩形块,所述矩形块上开设有与连杆相适配的圆孔,所述矩形块底部固定连接有滑动板,所述滑动板顶部两端均开设有三角孔,两个所述凸块分别滑动连接在相靠近的三角孔中,所述矩形块顶部一侧靠近三角孔窄侧的一端固定连接有把手,所述连杆位于矩形块远离把手的一端套设有第三弹簧,通过限位机构的设置,使得无人机的支架放在弧形卡孔上的时候,自动锁定,同时解锁便捷。
5、作为本实用新型的进一步方案,所述连接板底部设置有调节机构,所述调节机构包括有固定连接在连接板底部中间位置的条形框,所述条形框内壁两端之间转动连接有同一个丝杆,所述丝杆圆周表面螺接有移动块,所述移动块上开设有与丝杆相适配的螺纹孔,所述条形框外壁一端固定安装有电机,且电机输出端贯穿条形框固定连接在丝杆的一端,所述条形框两侧底部处均开设有条形孔。
6、作为本实用新型的进一步方案,所述调节机构还包括有转动连接在条形框外壁远离电机的一端u型板,所述u型板两侧均开设有斜孔,所述移动块两侧底部处均固定连接有圆杆,每个所述圆杆均滑动贯穿同侧条形孔和斜孔,通过调节机构的设置,使得清洁机器装置可以倾斜,使得无人机带着清洁机器装置在光伏板上的时候,清洁机器装置可以与光伏板相适配,且无人机保持竖直状态,便于起飞和降落。
7、作为本实用新型的进一步方案,所述u型板底部固定连接有清洁机器装置,所述清洁机器装置两侧设置有驱动机构,所述清洁机器装置底部一侧设置有清洁辊,所述清洁机器装置底部中间位置设置有吹风扇,吹风扇将灰尘吹到前端,提高清洁的效率。
8、作为本实用新型的进一步方案,所述无人机底部两侧均固定连接有支架,所述弧形卡孔与支架相适配,通过弧形卡孔和支架的配合,使得无人机的支架放在弧形卡孔上的时候,自动锁紧。
9、本实用新型的有益效果为:
10、本实用新型:由于采用了升降板、弧形卡孔、凹槽、滑杆、第一弹簧、限位板和限位机构等技术手段,将无人机的两个支架放置在两个弧形卡孔上,由于无人机重量的作用,使得升降板下降,压缩四个第一弹簧,升降板下降到一定的程度的时候,凹槽与卡板分离,在第二弹簧的作用下,两个滑动块和卡板向外侧伸出,将弧形卡孔顶部封住,使得该装置与无人机的支架固定连接,由于三角孔的作用,滑动块向外侧伸出的时候,三角孔没有阻碍作用,有效解决了背景技术中提出的问题,进而实现了无人机通过两个支架,放在弧形卡孔,在重力的作用下,即可实现自动锁定,使得无人机与清洁装置快速连接,实现清洁装置清洁完一块光伏板后,通过无人机飞到另一个光伏板上,无需工作人员手动对清洁装置进行转移,提高实用性和工作效率的技术效果。
11、本实用新型:通过调节机构的设置,无人机带着该装置起飞后,启动电机,使得移动块移动,在条形孔和斜孔的作用下,使得下方的清洁机器装置倾斜到与光伏板一样的倾斜角度,使得无人机将该装置带动光伏板的时候,降落的时候,清洁机器装置与光伏板接触的时候,无人机保持正立的状态,保证无人机起飞和降落的稳定性。
技术特征:1.一种挂载在无人机上的光伏板清洁机器人,包括连接板(3)和无人机(1),其特征在于,所述连接板(3)顶部固定连接有u型罩(5),所述u型罩(5)内壁之间滑动连接有升降板(6),所述升降板(6)底部四个拐角处均固定连接有滑杆(603),同侧两个所述滑杆(603)底部均滑动贯穿连接板(3)固定连接有同一个限位板(605),四个所述滑杆(603)位于连接板(3)顶部的圆周表面均套设有第一弹簧(604),所述升降板(6)顶部位于u型罩(5)外侧均开设有弧形卡孔(601),所述升降板(6)顶部位于u型罩(5)内侧处开设有凹槽(602),所述u型罩(5)顶部中间位置开设有矩形孔(501),所述矩形孔(501)初步设置有限位机构(7),所述限位机构(7)包括有固定连接在矩形孔(501)内壁两侧之间固定连接有同一个限位杆(701),所述限位杆(701)圆周表面对称滑动套设有两个滑动块(702),两个所述滑动块(702)上均开设有与限位杆(701)相适配的圆孔,两个所述滑动块(702)底部均固定连接有卡板(705),两个所述卡板(705)与凹槽(602)相适配,所述限位杆(701)位于两个滑动块(702)之间圆周表面套设有第二弹簧(704),两个所述滑动块(702)顶部均固定连接有凸块(703)。
2.根据权利要求1所述的一种挂载在无人机上的光伏板清洁机器人,其特征在于,所述限位机构(7)还包括有分别固定连接在u型罩(5)顶部位于矩形孔(501)两侧的两个竖板(706),两个所述竖板(706)之间固定连接有同一个连杆(707),所述连杆(707)圆周表面滑动套设有矩形块(709),所述矩形块(709)上开设有与连杆(707)相适配的圆孔,所述矩形块(709)底部固定连接有滑动板(710),所述滑动板(710)顶部两端均开设有三角孔(711),两个所述凸块(703)分别滑动连接在相靠近的三角孔(711)中,所述矩形块(709)顶部一侧靠近三角孔(711)窄侧的一端固定连接有把手(712),所述连杆(707)位于矩形块(709)远离把手(712)的一端套设有第三弹簧(708)。
3.根据权利要求1所述的一种挂载在无人机上的光伏板清洁机器人,其特征在于,所述连接板(3)底部设置有调节机构(4),所述调节机构(4)包括有固定连接在连接板(3)底部中间位置的条形框(401),所述条形框(401)内壁两端之间转动连接有同一个丝杆(403),所述丝杆(403)圆周表面螺接有移动块(404),所述移动块(404)上开设有与丝杆(403)相适配的螺纹孔,所述条形框(401)外壁一端固定安装有电机(405),且电机(405)输出端贯穿条形框(401)固定连接在丝杆(403)的一端,所述条形框(401)两侧底部处均开设有条形孔(402)。
4.根据权利要求3所述的一种挂载在无人机上的光伏板清洁机器人,其特征在于,所述调节机构(4)还包括有转动连接在条形框(401)外壁远离电机(405)的一端u型板(406),所述u型板(406)两侧均开设有斜孔(407),所述移动块(404)两侧底部处均固定连接有圆杆(408),每个所述圆杆(408)均滑动贯穿同侧条形孔(402)和斜孔(407)。
5.根据权利要求4所述的一种挂载在无人机上的光伏板清洁机器人,其特征在于,所述u型板(406)底部固定连接有清洁机器装置(2),所述清洁机器装置(2)两侧设置有驱动机构(202),所述清洁机器装置(2)底部一侧设置有清洁辊(201),所述清洁机器装置(2)底部中间位置设置有吹风扇(203)。
6.根据权利要求1所述的一种挂载在无人机上的光伏板清洁机器人,其特征在于,所述无人机(1)底部两侧均固定连接有支架(101),所述弧形卡孔(601)与支架(101)相适配。
技术总结本技术公开了一种挂载在无人机上的光伏板清洁机器人,包括连接板和无人机,所述连接板顶部固定连接有U型罩,所述U型罩内壁之间滑动连接有升降板,所述升降板底部四个拐角处均固定连接有滑杆,同侧两个所述滑杆底部均滑动贯穿连接板固定连接有同一个限位板,四个所述滑杆位于连接板顶部的圆周表面均套设有第一弹簧,所述升降板顶部位于U型罩外侧均开设有弧形卡孔。本技术,实现了无人机通过两个支架,放在弧形卡孔,在重力的作用下,即可实现自动锁定,使得无人机与清洁装置快速连接,实现清洁装置清洁完一块光伏板后,通过无人机飞到另一个光伏板上,无需工作人员手动对清洁装置进行转移,提高实用性和工作效率的技术效果。技术研发人员:王敏,杨东波,刚天龙,王勇,陈科枫,何工,罗海涛受保护的技术使用者:深圳伊尚纳米科技有限公司技术研发日:20231028技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240722/223034.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表