具有水质监测的视觉水下机器人的制作方法
- 国知局
- 2024-08-01 07:04:03
本申请涉及水下机器人,尤其是具有水质监测的视觉水下机器人。
背景技术:
1、水下机器人,是一种可以在水下执行多种任务的作业机器人,它们能够在水下环境中进行各种复杂的作业,帮助人们更好地了解和利用水下环境。
2、现有专利文献“cn208248469u水下机器人”中,公开了一种水下机器人,这种水下机器人虽然可以进入水域内部进行相应的工作,但是在具体针对景区、人工湖等封闭水域内进行运动时,由于上述技术方案中,仅通过推进器进行推进运动,会使得运动的灵活度不足,且不便于针对不同深度的水域进行监测以及垃圾回收;
3、也即,现有技术存在如下的技术问题,普通的水下机器人仅通过推进器进行推进运动的灵活度不足难以针对不同深度的水域进行工作。因此,针对上述问题提出具有水质监测的视觉水下机器人。
技术实现思路
1、在本实施例中提供了具有水质监测的视觉水下机器人用于解决现有技术中的普通的水下机器人仅通过推进器进行推进运动的灵活度不足难以针对不同深度的水域进行工作的问题。
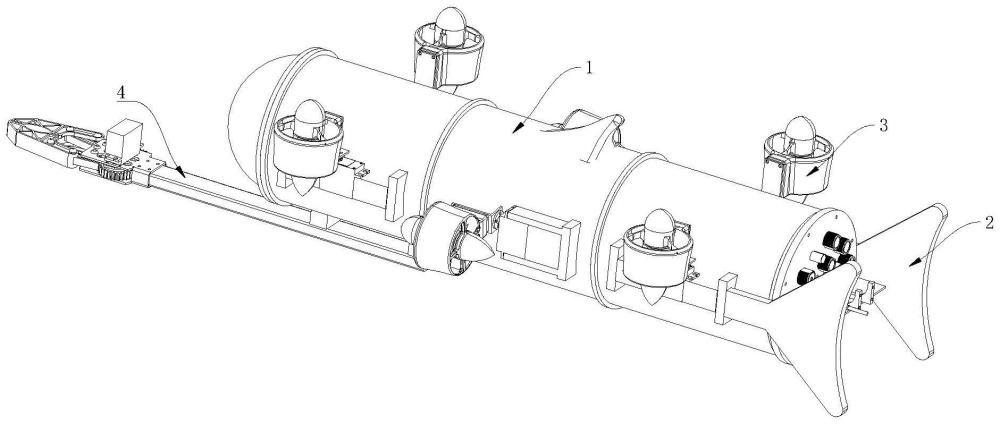
2、根据本申请的一个方面,提供了具有水质监测的视觉水下机器人,所述具有水质监测的视觉水下机器人包括:
3、主体,所述主体的尾端位置处固定连接有两个尾翼;
4、运动控制部件,所述运动控制部件固定设置在主体的外壁处,所述运动控制部件可带动主体在水下运动,所述运动控制部件可调节推进角度;
5、物品打捞部件,所述物品打捞部件固定设置在主体的底面处,所述物品打捞部件可抓取水下物品。
6、进一步地,所述主体包括外壳和前罩壳,所述外壳的前端处固定连接有前罩壳,所述外壳为圆柱形结构,所述前罩壳为半圆壳形结构,所述外壳的内部固定连接有电源、控制电路和水质检测仪,通过本技术方案,使得主体适合在水下运动。
7、进一步地,所述前罩壳为透明材质构成,所述前罩壳的内部固定连接有摄像机,通过本技术方案,可以实现水下摄像的功能。
8、进一步地,述外壳包括pvc材料层、亚克力板和铝板,所述pvc材料层的内侧固定连接有亚克力板,所述亚克力板的内侧固定连接有铝板,通过本技术方案,使得外壳具有较好的强度,同时外部的pvc材料层可以起到较好的水下防锈蚀功能。
9、进一步地,所述运动控制部件包括舵机、连接架和推进器,所述舵机固定设置在主体的外壁处,所述舵机的输出端固定连接有连接架,所述连接架的侧壁处固定连接有推进器,通过本技术方案,可以使得推进器的角度调节功能。
10、进一步地,所述运动控制部件至少6个;通过本技术方案,通过多个运动控制部件可以有效的驱动本装置在水下移动,并保持运动时的平衡。
11、进一步地,所述6个运动控制部件呈对称分布在主体的两侧侧壁处,其中四个运动控制部件的推进方向为竖直方向,其中两个运动控制部件的推进方向为水平方向,通过本技术方案,可以有效的实现主体在水下进行多角度,各方向以及不同深度的运动。
12、进一步地,所述物品打捞部件包括固定臂、连接架、平板、摆臂、齿轮、抓取部和伺服电机,所述固定臂的上表面处固定连接有连接架,所述连接架固定设置在主体的底面处,所述固定臂的前端处固定连接有平板,所述平板的两侧处均转动连接有摆臂,两个所述摆臂上均固定连接有齿轮,两个所述齿轮之间相互啮合,所述摆臂的前端处固定连接有抓取部,所述平板上固定连接有伺服电机,所述伺服电机的输出轴末端与齿轮之间固定连接,通过本技术方案,可以实现水下对垃圾物品的抓取夹持作用。
13、进一步地,所述抓取部为夹爪,通过本技术方案,方便水下对垃圾进行抓取回收。
14、进一步地,所述抓取部的前端侧壁处设置有咬齿,所述抓取部的侧壁处设置有凹槽,通过本技术方案,方便对水下的塑料袋等软体垃圾抓取。
15、通过本申请上述实施例,特别适合针对水面较窄、水深较浅的封闭水域内进行工作,可以有效的对水域中的小型垃圾物品进行清理,通过运动控制部件的作用,可以有效的在水中进行多方位的移动,相对普通的水体机器人,行动更加灵活,适合推广。
技术特征:1.具有水质监测的视觉水下机器人,其特征在于:所述具有水质监测的视觉水下机器人包括:
2.根据权利要求1所述的具有水质监测的视觉水下机器人,其特征在于:所述主体(1)包括外壳(101)和前罩壳(102),所述外壳(101)的前端处固定连接有前罩壳(102),所述外壳(101)为圆柱形结构,所述前罩壳(102)为半圆壳形结构,所述外壳(101)的内部固定连接有电源(105)、控制电路(104)和水质检测仪(106)。
3.根据权利要求2所述的具有水质监测的视觉水下机器人,其特征在于:所述前罩壳(102)为透明材质构成,所述前罩壳(102)的内部固定连接有摄像机(103)。
4.根据权利要求2所述的具有水质监测的视觉水下机器人,其特征在于:述外壳(101)包括pvc材料层(1011)、亚克力板(1012)和铝板(1013),所述pvc材料层(1011)的内侧固定连接有亚克力板(1012),所述亚克力板(1012)的内侧固定连接有铝板(1013)。
5.根据权利要求1所述的具有水质监测的视觉水下机器人,其特征在于:所述运动控制部件(3)包括舵机(303)、连接架(302)和推进器(301),所述舵机(303)固定设置在主体(1)的外壁处,所述舵机(303)的输出端固定连接有连接架(302),所述连接架(302)的侧壁处固定连接有推进器(301)。
6.根据权利要求5所述的具有水质监测的视觉水下机器人,其特征在于:所述运动控制部件(3)至少6个。
7.根据权利要求6所述的具有水质监测的视觉水下机器人,其特征在于:所述6个运动控制部件(3)呈对称分布在主体(1)的两侧侧壁处,其中四个运动控制部件(3)的推进方向为竖直方向,其中两个运动控制部件(3)的推进方向为水平方向。
8.根据权利要求1所述的具有水质监测的视觉水下机器人,其特征在于:所述物品打捞部件(4)包括固定臂(401)、连接架(402)、平板(403)、摆臂(404)、齿轮(405)、抓取部(406)和伺服电机(407),所述固定臂(401)的上表面处固定连接有连接架(402),所述连接架(402)固定设置在主体(1)的底面处,所述固定臂(401)的前端处固定连接有平板(403),所述平板(403)的两侧处均转动连接有摆臂(404),两个所述摆臂(404)上均固定连接有齿轮(405),两个所述齿轮(405)之间相互啮合,所述摆臂(404)的前端处固定连接有抓取部(406),所述平板(403)上固定连接有伺服电机(407),所述伺服电机(407)的输出轴末端与齿轮(405)之间固定连接。
9.根据权利要求8所述的具有水质监测的视觉水下机器人,其特征在于:所述抓取部(406)为夹爪。
10.根据权利要求9所述的具有水质监测的视觉水下机器人,其特征在于:所述抓取部(406)的前端侧壁处设置有咬齿(4061),所述抓取部(406)的侧壁处设置有凹槽(4062)。
技术总结本申请公开了具有水质监测的视觉水下机器人,所述具有水质监测的视觉水下机器人包括:主体,所述主体的尾端位置处固定连接有两个尾翼;运动控制部件,所述运动控制部件固定设置在主体的外壁处,所述运动控制部件可带动主体在水下运动,所述运动控制部件可调节推进角度;物品打捞部件,所述物品打捞部件固定设置在主体的底面处,所述物品打捞部件可抓取水下物品;本申请特别适合针对水面较窄、水深较浅的封闭水域内进行工作,可以有效的对水域中的小型垃圾物品进行清理,通过运动控制部件的作用,可以有效的在水中进行多方位的移动,相对普通的水体机器人,行动更加灵活,适合推广。技术研发人员:于飞,伊焕峰,马德彪,许栗铭受保护的技术使用者:黑龙江臻驻科技有限公司技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240722/225943.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表