仿生水面机器人的制作方法
- 国知局
- 2024-08-01 07:14:52
本发明涉及仿生水面机器人,尤其是涉及一种仿生水面机器人。
背景技术:
1、仿生水面机器人是指模仿水黾、水蜘蛛等水上昆虫,依靠水表面张力浮于水面,能够在水面上实现运动的一类微小型机器人,通过搭载各种传感器,可以开展水域环境的水面侦察、水质监测等任务,也可以在大范围水域环境内大量部署,配合卫星、地面基站等构建无线通讯网络。
2、相关技术中,在可水面稳定漂浮的部件上采用机械零件组装方式制备机器人,例如,cn104176223a一种仿水黾水上运动机器人,cn113753183a一种基于表面张力的仿生水黾机器人。这种机械驱动模式不可避免的需要负载电池或外接电源,会限制机器人的运动自由度,同时负载的电机、电源、传动部件等难以进行体积优化的模块,不利于实现此类机器人的轻量化和微型化的设计。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的实施例提出一种仿生水面机器人,实现了无电机驱动的非机械式的仿生水面机器人的设计,具有轻量化、可变形的特点,可实现仿生水面机器人的微型化。
2、本发明实施例的仿生水面机器人包括:
3、移动平台,所述移动平台包括承载部和驱动部,所述承载部包括第一薄膜和第一骨架,所述第一骨架设在所述第一薄膜上,所述驱动部包括第二薄膜和第二骨架,所述第二薄膜为光热膜,所述第二薄膜与所述第一薄膜相连,所述第二骨架设在所述第二薄膜上,所述第二骨架与所述第一骨架相连;
4、包覆层,所述包覆层设在所述承载部上;和
5、柔性电路板,所述柔性电路板被所述承载部和所述包覆层包裹。
6、本发明实施例的仿生水面机器人的柔性电路板具有环境感知功能,驱动部的第二薄膜具有光响应驱动效果,实现了无电机驱动的非机械式的仿生水面机器人的设计,具有轻量化、可变形的特点,可实现仿生水面机器人的微型化。
7、在一些实施例中,所述第二薄膜设有沿其厚度方向贯通的通孔。
8、在一些实施例中,所述承载部在厚度方向上具有相对设置的第一表面和第二表面,所述驱动部在所述厚度方向上具有相对设置的第三表面和第四表面,其中,所述第一表面和所述第三表面位于同一侧,所述第二表面和所述第四表面位于同一侧;
9、所述第一表面的至少一部分为疏水表面,所述疏水表面的水接触角范围为150°-180°;和/或
10、所述第三表面的至少一部分为亲水表面,所述亲水表面的水接触角范围为10°-25°。
11、在一些实施例中,所述仿生水面机器人进一步包括超疏水涂层,所述第二表面和所述第四表面中的每一者上设有所述超疏水涂层,所述包覆层被所述第二表面和所述超疏水涂层包裹。
12、在一些实施例中,所述第二表面与所述第四表面之间的夹角范围为0°-180°;可选地,所述第一骨架和所述第二骨架中的每一者为形状记忆骨架。
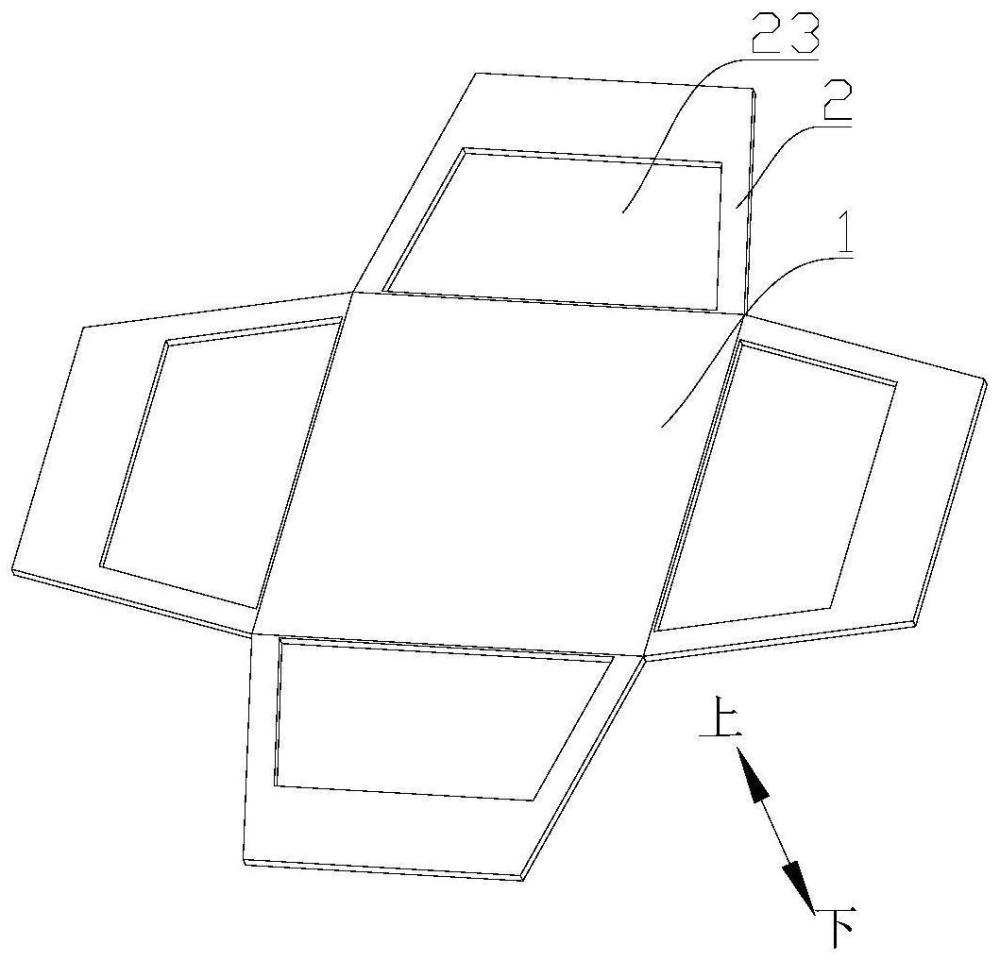
13、在一些实施例中,所述驱动部的数量为多个,多个所述驱动部环绕所述承载部分布。
14、在一些实施例中,所述承载部为中心对称结构,所述承载部具有对称中心,多个所述驱动部绕所述对称中心呈中心对称分布且等间距。
15、在一些实施例中,所述第一薄膜包括相连的第一膜层和第二膜层,所述第一膜层和第二膜层包裹所述第一骨架;和/或,
16、所述第二薄膜包括相连的第三膜层和第四膜层,所述第三膜层和第四膜层包裹所述第二骨架。
17、在一些实施例中,所述第一薄膜为光热膜,所述第一薄膜与所述第二薄膜一体成型。
18、在一些实施例中,所述第一薄膜与所述第二薄膜中的每一者的厚度为100-800μm。
技术特征:1.一种仿生水面机器人,其特征在于,包括:
2.根据权利要求1所述的仿生水面机器人,其特征在于,所述第二薄膜(21)设有沿其厚度方向贯通的通孔(23)。
3.根据权利要求1所述的仿生水面机器人,其特征在于,
4.根据权利要求3所述的仿生水面机器人,其特征在于,进一步包括超疏水涂层(40),所述第二表面和所述第四表面中的每一者上设有所述超疏水涂层(40),所述包覆层(30)被所述第二表面和所述超疏水涂层(40)包裹。
5.根据权利要求3所述的仿生水面机器人,其特征在于,所述第二表面与所述第四表面之间的夹角范围为0°-180°;可选地,所述第一骨架(12)和所述第二骨架(22)中的每一者为形状记忆骨架。
6.根据权利要求1所述的仿生水面机器人,其特征在于,所述驱动部(2)的数量为多个,多个所述驱动部(2)环绕所述承载部(1)分布。
7.根据权利要求6所述的仿生水面机器人,其特征在于,所述承载部(1)为中心对称结构,所述承载部(1)具有对称中心,多个所述驱动部(2)绕所述对称中心呈中心对称分布且等间距。
8.根据权利要求1所述的仿生水面机器人,其特征在于,
9.根据权利要求1所述的仿生水面机器人,其特征在于,
10.根据权利要求9所述的仿生水面机器人,其特征在于,所述第一薄膜(11)与所述第二薄膜(21)中的每一者的厚度为100-800μm。
技术总结本发明涉及一种仿生水面机器人,包括移动平台、柔性电路板和包覆层,移动平台包括承载部和驱动部,承载部包括第一薄膜和第一形状记忆骨架,第一形状记忆骨架设在第一薄膜上,驱动部包括第二薄膜和第二形状记忆骨架,第二薄膜为光热膜,第二薄膜与第一薄膜相连,第二形状记忆骨架设在第二薄膜上,第二形状记忆骨架与第一形状记忆骨架相连;柔性电路板设在承载部在其厚度方向上的一侧;所述包覆层设在所述承载部上,所述柔性电路板被所述承载部和所述包覆层包裹。本发明的仿生水面机器人实现了无电机驱动的非机械式的仿生水面机器人的设计,具有轻量化、可变形的特点,可实现仿生水面机器人的微型化。技术研发人员:冯雪,张志兴,陈颖,张飞受保护的技术使用者:浙江清华柔性电子技术研究院技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240722/226707.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表