机器人避障方法、装置、电子设备、存储介质及程序产品与流程
- 国知局
- 2024-07-31 23:43:41
本申请涉及金融科技和相关,尤其涉及一种机器人避障方法、装置、电子设备、存储介质及程序产品。
背景技术:
1、服务机器人能够替代人工提供迎宾接待、业务咨询、引导分流、金融业务办理等工作。但在银行网点的复杂环境中,如何规划服务机器人的移动路径和控制服务机器人躲避障碍是目前的难点。
2、现目前可以通过人工势场法来控制服务机器人躲避障碍,但是在人工势场法中,当服务机器人离目标点较远时,目标点对服务机器人的引力会变特别大,而导致对服务机器人的斥力较小的障碍物被忽略,进而使得服务机器人在可能会在移动路径上碰到障碍物。
3、综上,现有的控制服务机器人躲避障碍的方法,存在避障精度低的问题。
技术实现思路
1、本申请提供一种机器人避障方法、装置、电子设备、存储介质及程序产品,用以解决现有技术中控制服务机器人躲避障碍的方法存在避障精度低的技术问题。
2、第一方面,本申请提供一种机器人避障方法,包括:
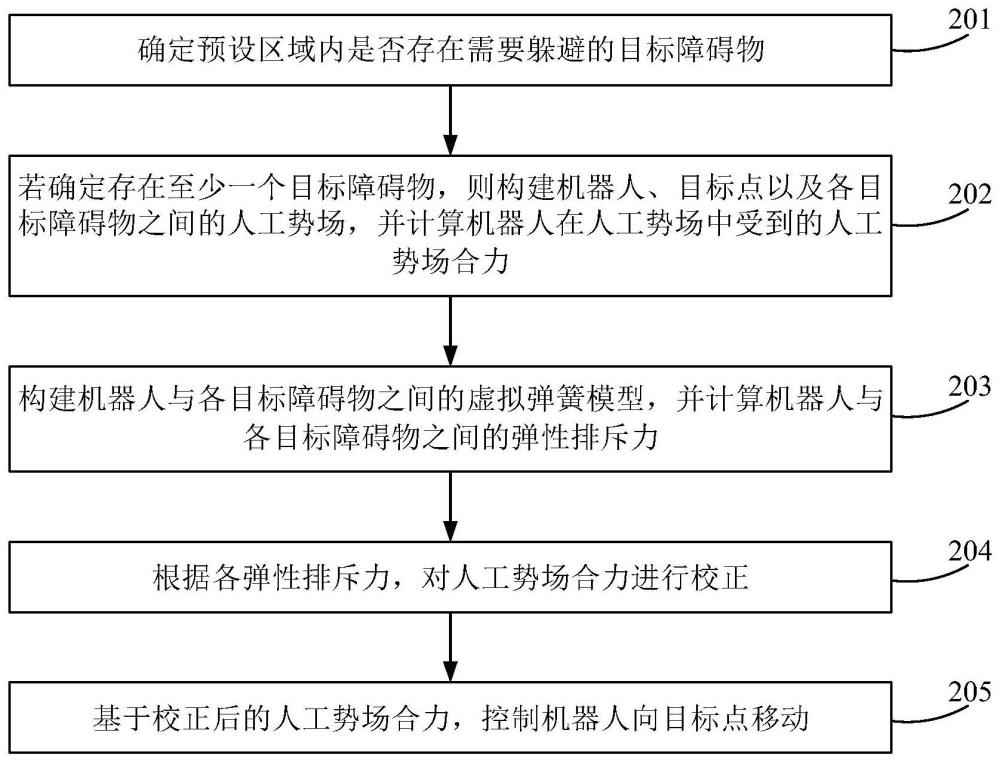
3、确定预设区域内是否存在需要躲避的目标障碍物;
4、若确定存在至少一个目标障碍物,则构建机器人、目标点以及各目标障碍物之间的人工势场,并计算机器人在人工势场中受到的人工势场合力;
5、构建机器人与各目标障碍物之间的虚拟弹簧模型,并计算机器人与各目标障碍物之间的弹性排斥力;
6、根据各所述弹性排斥力,对所述人工势场合力进行校正;
7、基于校正后的人工势场合力,控制机器人向目标点移动。
8、第二方面,本申请提供一种机器人避障装置,包括:
9、确定模块,用于确定预设区域内是否存在需要躲避的目标障碍物;
10、第一计算模块,用于若确定存在至少一个目标障碍物,则构建机器人、目标点以及各目标障碍物之间的人工势场,并计算机器人在人工势场中受到的人工势场合力;
11、第二计算模块,用于构建机器人与各目标障碍物之间的虚拟弹簧模型,并计算机器人与各目标障碍物之间的弹性排斥力;
12、校正模块,用于根据各所述弹性排斥力,对所述人工势场合力进行校正;
13、控制模块,用于基于校正后的人工势场合力,控制机器人向目标点移动。
14、第三方面,本申请提供一种电子设备,包括:处理器,以及与所述处理器通信连接的存储器;
15、所述存储器存储计算机执行指令;
16、所述处理器执行所述存储器存储的计算机执行指令,以实现如第一方面所述的机器人避障方法。
17、第四方面,本申请提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如第一方面所述的机器人避障方法。
18、第五方面,本申请提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时如第一方面所述的机器人避障方法。
19、本申请提供的机器人避障方法、装置、电子设备、存储介质及程序产品,通过确定预设区域内是否存在需要躲避的目标障碍物;若确定存在至少一个目标障碍物,则构建机器人、目标点以及各目标障碍物之间的人工势场,并计算机器人在人工势场中受到的人工势场合力;构建机器人与各目标障碍物之间的虚拟弹簧模型,并计算机器人与各目标障碍物之间的弹性排斥力;根据各所述弹性排斥力,对所述人工势场合力进行校正;基于校正后的人工势场合力,控制机器人向目标点移动。由于在预设区域内存在需要躲避的目标障碍物时,通过障碍物对服务机器人的弹性排斥力对服务机器人所受到的人工势场合力进行校正,同时不影响人工势场合力的计算方式,进而基于校正后的人工势场合力,控制机器人向目标点移动,能够在预设区域内存在需要躲避的目标障碍物时,使得机器人更容易躲开障碍物,提高机器人的避障精度,避免机器人与障碍物发生碰撞。
技术特征:1.一种机器人避障方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述确定预设区域内是否存在需要躲避的目标障碍物,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据机器人的位置、以及各初始障碍物的位置和速度,确定机器人是否需要躲避各初始障碍物,包括:
4.根据权利要求1所述的方法,其特征在于,所述构建机器人、目标点以及各目标障碍物之间的人工势场,并计算机器人在人工势场中受到的人工势场合力,包括:
5.根据权利要求1所述的方法,其特征在于,所述构建机器人与各目标障碍物之间的虚拟弹簧模型,并计算机器人与各目标障碍物之间的弹性排斥力,包括:
6.根据权利要求1所述的方法,其特征在于,所述根据各所述弹性排斥力,对所述人工势场合力进行校正,包括:
7.根据权利要求1所述的方法,其特征在于,所述根据各所述弹性排斥力,对所述人工势场合力进行校正,包括:
8.根据权利要求1所述的方法,其特征在于,所述基于校正后的人工势场合力,控制机器人移动之后,还包括:
9.一种机器人避障装置,其特征在于,包括:
10.一种电子设备,其特征在于,包括:处理器,以及与所述处理器通信连接的存储器;
11.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如权利要求1至8中任一项所述的方法。
12.一种计算机程序产品,其特征在于,包括计算机程序,该计算机程序被处理器执行时实现如权利要求1至8中任一项所述的方法。
技术总结本申请提供一种机器人避障方法、装置、电子设备、存储介质及程序产品,涉及金融科技或其它相关技术领域。该方法包括:确定预设区域内是否存在需要躲避的目标障碍物;若确定存在至少一个目标障碍物,则构建机器人、目标点以及各目标障碍物之间的人工势场,并计算机器人在人工势场中受到的人工势场合力;构建机器人与各目标障碍物之间的虚拟弹簧模型,并计算机器人与各目标障碍物之间的弹性排斥力;根据各弹性排斥力,对人工势场合力进行校正;基于校正后的人工势场合力,控制机器人向目标点移动。本申请的方法,能够提高机器人的避障精度。技术研发人员:李洁纯,周剑铭,王世龙,张悦受保护的技术使用者:中国工商银行股份有限公司技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240730/198294.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。