机器人修复系统和方法与流程
- 国知局
- 2024-08-05 11:44:46
背景技术:
1、清漆涂层修复是汽车和车辆原始装备制造(oem)部门中要自动化的最后操作中的一项操作。期望用于使该过程以及适于使用磨料和/或机器人检查和修复的其他油漆应用(例如,底漆砂磨、清漆涂层缺陷移除、清漆涂层抛光等)自动的技术。
2、使油漆缺陷的检测和修复自动化的早期工作包括美国专利公布2003/0139836中描述的系统,该专利公布公开了使用电子成像来检测和修复车身上的油漆缺陷。该系统参考车辆成像数据与车辆cad数据,以形成每个油漆缺陷的三维油漆缺陷位置坐标。油漆缺陷数据(例如,缺陷类型等)和油漆缺陷位置坐标用于开发用于使用多个自动化机器人进行自动化修复的修复对策,该自动化机器人执行多种任务,包括砂磨和抛光油漆缺陷。
技术实现思路
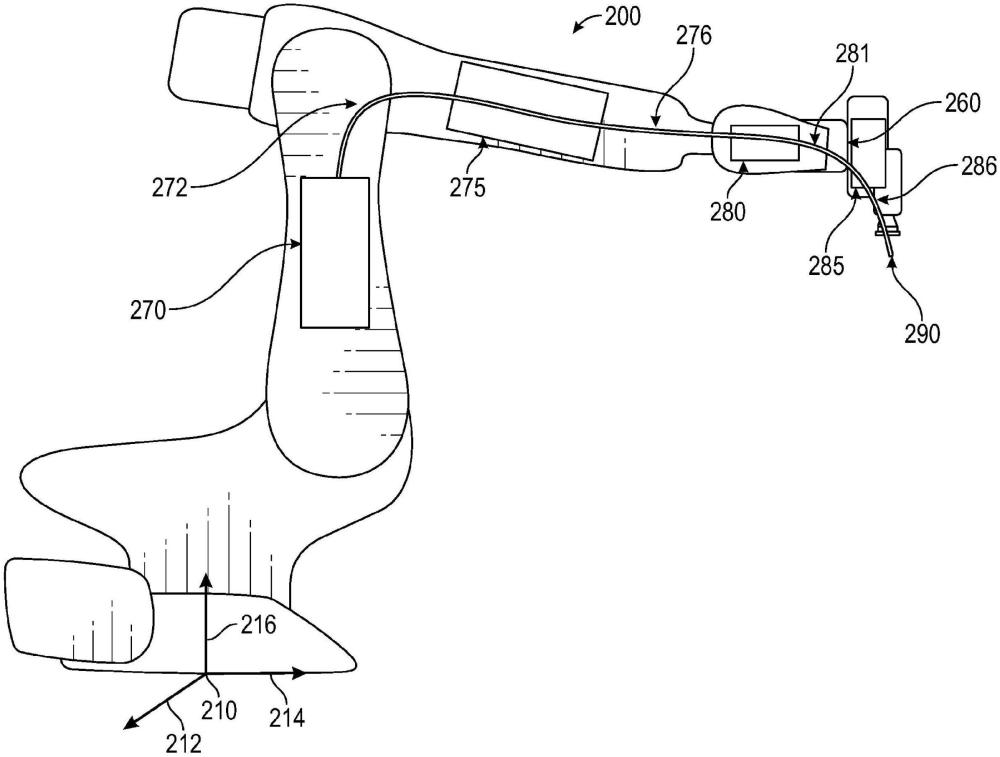
技术特征:1.一种替换机器人修复系统上的流体源的方法,所述方法包括:
2.根据权利要求1所述的方法,其中安装所述新流体源包括在安装到所述机器人修复系统的容器中安装新流体源。
3.根据权利要求1或2所述的方法,其中安装所述新流体源包括将所述新流体源连接到安装到所述机器人修复系统的流体分配器。
4.根据权利要求3所述的方法,其中所述新流体源通过流体管线连接到所述流体分配器。
5.根据权利要求4所述的方法,其中所述流体管线是柔性流体管线。
6.根据权利要求4所述的方法,其中所述柔性流体管线和所述新流体源包括单次使用材料。
7.根据权利要求1至6中任一项所述的方法,其中所述新流体源安装在所述机器人修复系统的工具侧上。
8.根据权利要求7所述的方法,其中所述第一传感器是重量传感器,所述重量传感器检测所使用的流体源的重量,所述重量指示所述替换流体液位。
9.根据权利要求1至8中任一项所述的方法,其中所述第一传感器或所述第二传感器各自选自:重量传感器、体积传感器或光学传感器。
10.根据权利要求1至9中任一项所述的方法,并且还包括:检测所述新流体源中的流体类型,以及将所检测的流体类型提供给与所述机器人修复单元相关联的控制器。
技术总结机器人修复系统和方法。本发明公开了一种用于机器人修复单元的流体分配系统,该流体分配系统包括流体容器。该系统还包括流体分配器,该流体分配器与机器人修复单元相关联。该系统还包含流体联接器,该流体联接器将抛光剂容器连接到抛光剂分配器。该系统还包含安装机构,该安装机构被配置为将该抛光剂容器联接到机器人修复单元。技术研发人员:阿伦·K·涅尔纳贝尔,克里斯蒂·L·维塔莱,保罗·拉金,乔纳森·B·阿瑟,内森·J·赫布斯特,布雷特·R·黑梅斯,托马斯·J·斯特里,斯科特·D·格利克斯受保护的技术使用者:3M创新有限公司技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/259180.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表