一种应对不同的驾驶场景的空调控制方法与流程
- 国知局
- 2024-08-05 11:45:48
本发明涉及于驾驶场景和汽车空调领域,尤其涉及一种应对不同的驾驶场景的空调控制方法。
背景技术:
1、应对不同的驾驶场景的空调系统仍处于发展阶段,但随着人工智能和车联网技术的不断进步,这项技术在汽车行业的应用前景十分广阔,随着相关技术的不断成熟和普及,应对不同的驾驶场景的空调技术迫在眉睫。
2、目前,汽车空调技术存在驾驶场景、环境情景识别不够精准,需要驾驶员手动调节汽车空调的温度和风度参数的技术问题。
技术实现思路
1、本发明的目的在于,针对以上现有技术问题,提出一种应对不同的驾驶场景的空调控制方法。
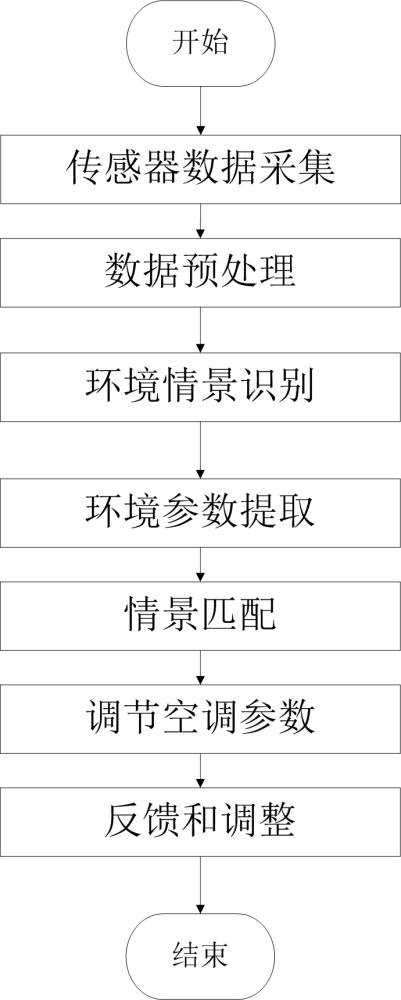
2、一种应对不同的驾驶场景的空调控制方法,包括以下子步骤:
3、s1:传感器数据采集:采集车辆周围环境的传感器数据;
4、s2:数据预处理:对采集到的传感器数据进行数据预处理;
5、s3:环境情景识别:通过对预处理后的传感器数据进行分析和处理,识别当前的驾驶场景、环境情景;
6、s4:环境参数提取:使用阈值法提取传感器数据中与空调的环境参数;
7、s5:情景匹配:将环境情景和环境参数和预设的情景模型进行匹配,确定当前的驾驶环境;
8、s6:调节空调参数:空调利用基于模糊逻辑的控制器根据预设的情景模型调整温度和风量参数;
9、s7:反馈和调整:根据空调的调节效果和驾驶员的反馈,对调节策略进行实时调整。
10、进一步的,一种应对不同的驾驶场景的空调控制方法,所述采集的设备包括摄像头、雷达、激光雷达;
11、所述设备用于感知车辆周围的道路情况、交通状况、周围车辆和障碍物的位置信息;
12、所述空调的环境参数包括周围气温、湿度、阳光强度、车辆速度;
13、所述控制器的输出=模糊规则×输入。
14、进一步的,一种应对不同的驾驶场景的空调控制方法,所述步骤s2包括以下子步骤:
15、s21:对采集到的传感器数据进行去噪、校正、数据融合;
16、s22:对采集到的传感器数据进行滤波、校准和插值。
17、进一步的,一种应对不同的驾驶场景的空调控制方法,所述步骤s22还包括以下子步骤:
18、s221:对采集到的传感器数据进行卡尔曼滤波预测步骤;
19、s222:对经过s221步骤处理的数据进行卡尔曼滤波更新步骤;
20、s223:对经过s222步骤处理的数据进行卡尔曼滤波最终预测步骤。
21、进一步的,一种应对不同的驾驶场景的空调控制方法,所述步骤s221包括以下子步骤:
22、s2211:对预测状态进行估计,预测状态估计公式为:
23、
24、其中,代表在k时刻时,基于时刻k-1的信息对状态的估计,a代表状态转移矩阵,描述状态如何随时间变化,代表时刻k-1的状态估计值,b代表控制输入矩阵,描述控制输入对状态的影响,uk-1代表时刻k-1的控制输入;
25、s2212:对预测协方差进行估计,预测协方差估计公式为:
26、pk|k-1=apk-1|k-1at+q
27、其中,pk|k-1代表在k时刻时对状态估计的不确定性,at代表状态转移矩阵a的转置矩阵,pk-1|k-1代表时刻k-1的状态估计的不确定性,q代表过程噪声协方差矩阵,描述不可预测的外部扰动。
28、进一步的,一种应对不同的驾驶场景的空调控制方法,所述步骤s222包括以下子步骤:
29、s2221:计算卡尔曼增益,卡尔曼增益公式为:
30、
31、其中,kk代表预测与测量的相对权重,代表观测矩阵hk的转置矩阵,hk代表观测矩阵,描述状态与观测之间的关系,r代表测量噪声协方差矩阵,描述观测过程中的噪声;
32、s2222:对状态估计进行更新,更新状态估计公式为:
33、
34、其中,代表更新后的状态估计值,zk代表时刻k的观测值;
35、s2223:对协方差估计进行更新,更新协方差估计公式为:
36、pk|k=(i-kkhk)pk|k-1
37、其中,pk|k代表更新后的状态协方差值,i代表单位矩阵。
38、进一步的,一种应对不同的驾驶场景的空调控制方法,所述步骤s223包括以下子步骤:
39、s2231:对最终预测状态的估计,最终预测状态估计公式为:
40、
41、其中,代表最终预测状态估计值,uk代表时刻k的控制输入;
42、s2232:对最终预测协方差进行估计,最终预测协方差估计公式为:
43、pk+1|k=ark|kat+q
44、其中,pk+1|k代表最终预测协方差估计值。
45、进一步的,一种应对不同的驾驶场景的空调控制方法,所述步骤s3包括以下子步骤:
46、s31:识别车辆当前城市行驶、高速巡航、停车的驾驶场景;
47、s32:利用机器学习算法,支持向量机svm进行环境情景识别,向量机svm的分类器公式为:
48、
49、其中,f(x)代表决策函数,用于将输入x分别到不同的种类,sign()代表符号函数,αi代表支持向量机中的拉个朗日乘子,yi代表训练样本的类别标签,k(xi,x)代表核函数,用于衡量样本之间的相似度,b代表偏置项,i代表所因变量,用于遍历训练数据集中的每个样本,n代表训练数据集中样本数量。
50、进一步的,一种应对不同的驾驶场景的空调控制方法,所述步骤s5包括以下子步骤:
51、s51:利用利用贝叶斯网络匹配算法,将识别到的驾驶情景、环境情景,提取的环境参数与与预设的情景模型进行匹配,确定当前的驾驶环境,贝叶斯网络的概率推理公式为;
52、
53、其中,p(a1|b1)代表在给定条件b1下事件a1的后验概率,p(b1|a1)代表在给定条件a1下事件b1的条件概率,p(a1)代表事件a1的先验概率,p(b1)代表事件p(b1)的先验概率。
54、进一步的,一种应对不同的驾驶场景的空调控制方法,所述步骤s7包括以下子步骤:
55、s71:利用反馈控制理论中的pid控制器根据空调的调节效果和驾驶员的反馈对调节策略进行实时调整,pid控制器控制公式为:
56、
57、所述ut代表输出,e(t)代表误差,kp、ki、kd为控制器的参数,分别代表比例、积分、微分函数,代表误差信号的积分,代表误差信号的微分。
58、本发明的有益效果为:通过一种应对不同的驾驶场景的空调控制方法,在高速巡航时,通过智能的风量控制,调节风口的开启程度和风速,适应高速行驶时的空气流动情况,保持舒适的室内温度;在停车时,空调自动节能模式或者自动关机,在车辆长时间停留时自动降低功耗,以延长电池寿命并减少能源消耗。
本文地址:https://www.jishuxx.com/zhuanli/20240802/259253.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表