一种自适应调节机构的制作方法
- 国知局
- 2024-09-05 14:52:38
本发明涉及冲压模具,尤其涉及一种自适应调节机构。
背景技术:
1、在拉延模中,合模时板料各位置处于收缩状态,压料圈与凹模之间各位置间隙直接影响板料收缩状态;由于压力产生的变形容易导致压料圈与凹模之间存在间隙,这个间隙会影响拉延质量和拉延模使用寿命;这个间隙是通过调整压料圈各位置垫块的高度来实现调整的,通过垫块的高度的调整实现板料拉延的最佳状态。
2、现有技术中的自适应调节机构一般通过在垫块下加垫片的方式以调整压料圈与凹模之间的间隙。这种调整方式存在以下缺点:其一,调整过程需工人打开模具,拆卸垫块,添加不同厚度垫片,操作过程复杂繁琐,且调整过程记录性差,对调整人员技能要求高。其二,垫片厚度精度最小0.02mm,调整精度不够,导致调整状态不理想。其三,垫片材质软,导致主体块整体承载力较低,经过长期冲压变形,垫块高度会发生变化,从而影响主体块的调整精度。其四,当拉延板料边界质量发生变化时,不能及时调整。另外,模具更换压机或生产线都需重新调整。从制造装配到调试,再到批量生产需经过多次调整,极大的增加了模具的制造周期,调试周期、制造周期以及冲压生产周期。
3、因此,现有技术存在拉延间隙调整过程繁琐,调整精度低,对调整人员技能要求高,效率低的缺点。
技术实现思路
1、本发明的目的是提供一种自适应调节机构,能够解决现有自适应调节机构调整过程繁琐,对调整人员技能要求高,效率低的技术问题。
2、为实现上述目的,本发明所设计的一种自适应调节机构,包括主体块、滑块、底座和电控驱动总成,所述主体块滑动设置在滑块上,所述主体块与滑块的接触面为斜面,斜面的方向沿滑块伸出方向倾斜向下;所述滑块滑动设置在底座上,所述电控驱动总成设置在底座内,电控驱动总成的驱动部穿过底座与滑块抵接。
3、作为优选方案,主体块所述主体块、滑块、底座均经过热处理,以提高硬度,增加主体块顶部承载力。
4、进一步地,所述主体块上设有用于回退的波形弹簧。
5、进一步地,所述滑块上设有用于回退的复位弹簧。
6、作为优选方案,所述电控驱动总成包括驱动块、电机,以及连接驱动块与电机的丝杠组件,所述电机设置在底座的下端,所述驱动块设置在底座的导向孔中,驱动块侧面与滑块侧面抵接。
7、进一步地,所述驱动块与滑块的抵接面为相互配合的斜面,斜面的方向沿滑块伸出方向倾斜向下。
8、作为优选方案,所述自适应调节机构还包括上壳体,所述上壳体内部为空腔结构,上壳体上端设有与空腔结构连通的安装孔,所述滑块设置在空腔结构内,所述主体块设置在安装孔内,主体块上端凸出于上壳体。
9、作为优选方案,所述自适应调节机构还包括盖板,所述盖板设置在上壳体的侧面,用于盖合上壳体的侧面空腔。
10、本发明的有益效果:
11、本发明提供的一种自适应调节机构,利用斜楔原理,合理布置伺服电机与垫主体块安装面的位置关系,确保模具在主体块的安装面下可布置支撑筋,保证模具强度和承载力。通过斜面设计来改变运动方向。将驱动块竖直方向的运动转化为滑块水平方向的运动,实现滑块的水平移动;再将滑块水平方向的运动转化为主体块竖直方向的运动,实现主体块在垂直方向的高度变化,来调整压料圈与凹模之间的间隙。该自适应调节机构结构简单,解决拉延模具主体块高度电控调整,主体块又需承受大的工作力的要求,是拉延模智能生产的执行机构。
12、利用伺服电机的精确转动,丝杠组及斜楔结构的减速,实现垫块高度的高精度调整,使垫块块的调整高度能精确到0.01mm;
13、利用摩擦角自锁原理,使其顶部的主体块能承受足够大的冲压力而不发生位移;主体块、滑块、底座材质做淬火处理,硬度较高,确保主体块顶部能承受1000mpa不发生变形,高度不发生变化;
14、利用斜楔原理,二次改变调节运动方向,合理布置伺服电机与垫块安装面的位置关系,确保模具在垫块安装面下可布置支撑筋,保证模具强度和承载力。
15、该自适应调节机构利用摩擦角自锁原理,使自适应主体块顶部的主体块在承受压力时,不会发生位移,高度保持不变,主体块、滑块、底座材质热处理,硬度较高,因此自适应确保主体块顶部能承受20吨的压力不发生变形,高度不发生变化,使主体块的调整高度能精确到0.01mm。
16、该自适应调节机构可以在模具外采用触摸屏、按键等方式进行自适应主体块高度调节;本发明还可以采集拉延质量信息,对主体块及时作出高度调整。
17、因此,本发明能够解决现有自适应调节机构调整过程繁琐,调整精度低,对调整人员技能要求高,效率低的技术问题。
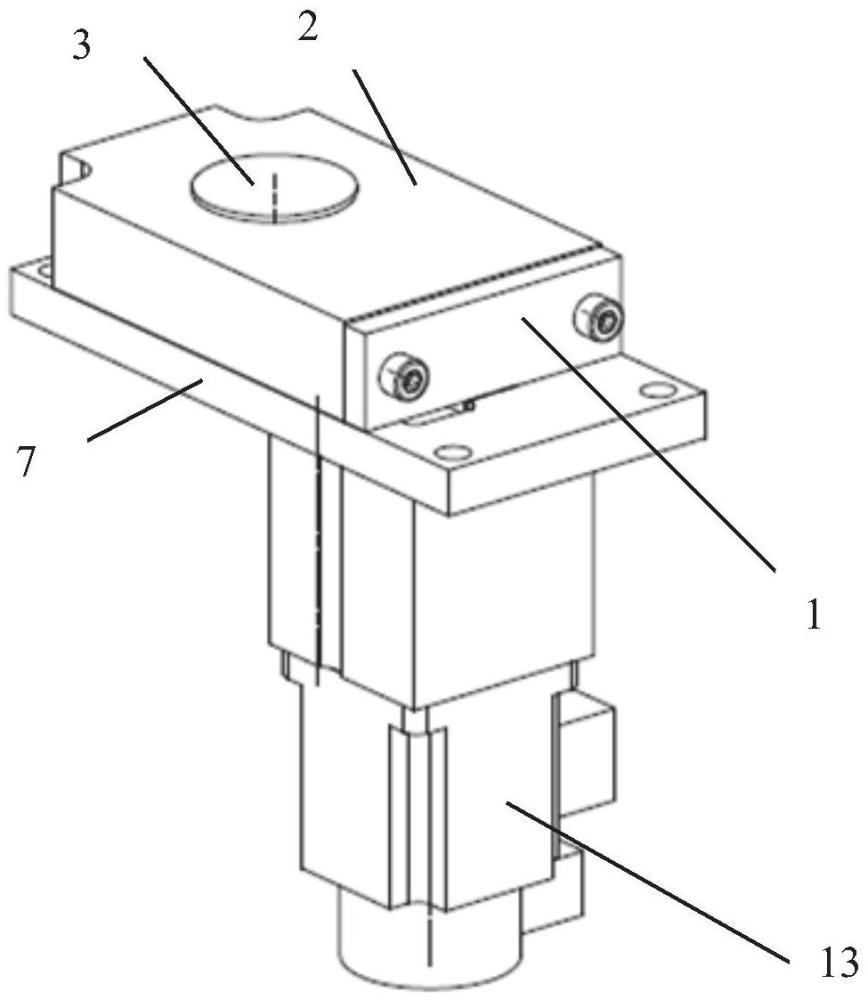
技术特征:1.一种自适应调节机构,其特征在于:包括主体块(3)、滑块(6)、底座(7)和电控驱动总成,所述主体块(3)滑动设置在滑块(6)上,所述主体块(3)与滑块(6)的接触面为斜面,斜面的方向沿滑块(6)伸出方向倾斜向下;所述滑块(6)滑动设置在底座(7)上,所述电控驱动总成设置在底座(7)内,电控驱动总成的驱动部穿过底座(7)与滑块(6)抵接。
2.根据权利要求1所述的一种自适应调节机构,其特征在于:主体块所述主体块(3)、滑块(6)、底座(7)均经过热处理,以提高硬度,增加主体块(3)顶部承载力。
3.根据权利要求2所述的一种自适应调节机构,其特征在于:所述主体块(3)上设有用于回退的波形弹簧(4)。
4.根据权利要求3所述的一种自适应调节机构,其特征在于:所述滑块(6)上设有用于回退的复位弹簧(5)。
5.根据权利要求1至4任一项所述的一种自适应调节机构,其特征在于:所述电控驱动总成包括驱动块(9)、电机(13),以及连接驱动块(9)与电机(13)的丝杠组件,所述电机(13)设置在底座(7)的下端,所述驱动块(9)设置在底座(7)的导向孔中,驱动块(9)侧面与滑块(6)侧面抵接。
6.根据权利要求5所述的一种自适应调节机构,其特征在于:所述驱动块(9)与滑块(6)的抵接面为相互配合的斜面,斜面的方向沿滑块(6)伸出方向倾斜向下。
7.根据权利要求6所述的一种自适应调节机构,其特征在于:所述自适应调节机构还包括上壳体(2),所述上壳体(2)内部为空腔结构,上壳体(2)上端设有与空腔结构连通的安装孔(21),所述滑块(6)设置在空腔结构内,所述主体块(3)设置在安装孔(21)内,主体块(3)上端凸出于上壳体(2)。
8.根据权利要求7所述的一种自适应调节机构,其特征在于:所述自适应调节机构还包括盖板(1),所述盖板(1)设置在上壳体(2)的侧面,用于盖合上壳体(2)的侧面空腔。
技术总结本发明涉及冲压模具技术领域,尤其涉及一种自适应调节机构,包括主体块、滑块、底座和电控驱动总成。本发明利用摩擦角自锁原理,使垫块机构能承受足够大的冲压料力;利用斜楔原理,通过斜面设计来改变运动方向。将驱动块竖直方向的运动转化为滑块水平方向的运动,实现滑块的水平移动;再将滑块水平方向的运动转化为主体块竖直方向的运动,实现主体块在垂直方向的高度变化,来调整压料圈与凹模之间的间隙。该自适应调节机构结构简单,垫块高度调节简单方便,解决拉延模具主体块高度电控调整问题。因此,本发明能够解决现有技术采用垫块加垫片调整拉延间隙的繁琐操作,调整精度低,对调整人员技能要求高,效率低的技术问题。技术研发人员:张忠武,刘电飞,严林,尹茂盛受保护的技术使用者:武汉科尔精密科技有限公司技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/288649.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表