一种结合四通道和时域无源的时延双边遥操作控制方法
- 国知局
- 2024-10-09 15:10:21
本发明涉及了一种时延双边遥操作控制方法,具体涉及一种结合四通道和时域无源的时延双边遥操作控制方法。
背景技术:
1、随着工业技术的进步,特别是机器人技术的开发和应用,各种重复或繁重的作业任务正逐渐由机器人所承担。然而在一些特殊领域,如太空和深海探索、远程医疗、核工业和化工业废料处理等场景下,由人类直接到达作业区域、或由全自主式机器人独立完成作业的方法,在技术上仍难以实现。因此,由人类操作者依靠双边遥操作系统远程操控机器人实现探索和作业目标的方法,成为重要的解决方案。
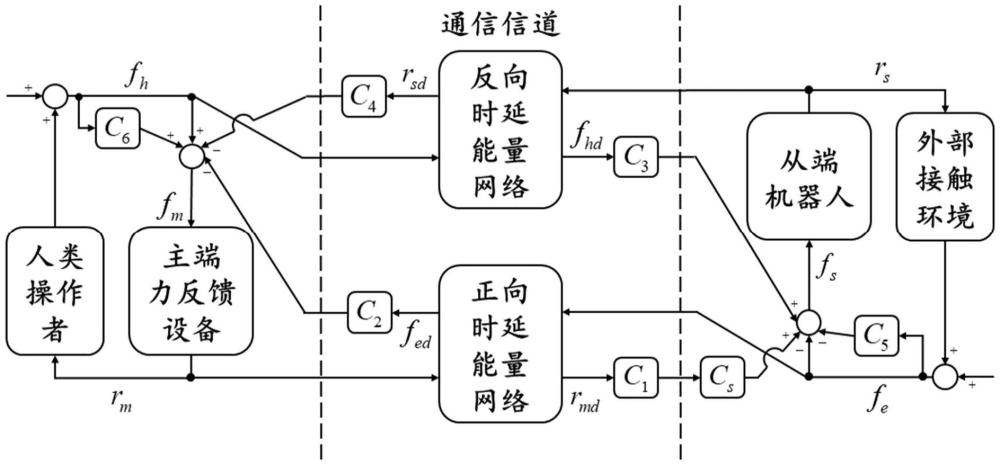
2、双边遥操作系统由主要人类操作者、主端力反馈设备、通信信道、从端机器人、外部接触环境构成。人类操作者在本地操作主端力反馈设备发出目标命令,命令信息通过通信信道传送,从端机器人接收命令,并在外部接触环境中移动作业,并通过通信通道将真实的环境信息反馈给人类操作者,其反映外界环境的能力被称为透明性。同时,实际通信信道往往存在较大时延,即主端发出命令和从端收到命令存在时间差,这种时延会导致遥操作系统不稳定,甚至引发从端机器人损坏等后果,保证双边遥操作系统在时延下的稳定性也成为一大挑战。
3、双边遥操作系统的透明性和稳定性相互制衡,在保证系统稳定性的同时提高系统透明性,仍是当前时延双边遥操作控制领域需要解决的问题。现有的控制方法在保证系统稳定性时,往往使反馈信息会发生畸变,导致系统透明性降低。
技术实现思路
1、为了解决技术背景中存在的问题,本发明提供一种结合四通道和时域无源的时延双边遥操作控制方法。本发明使用时域无源方法,建立包含无源观测器和无源控制器的时延能量网络,保证遥操作系统的稳定性,并建立四通道的通信架构,将主、从端位置和速度信息分别通过通信信道传输,提升遥操作系统的透明性。
2、本发明采用的技术方案是:
3、本发明的结合四通道和时域无源的时延双边遥操作控制方法,包括:
4、第一步:建立双边遥操作系统中操作者、主端力反馈设备、从端机器人和外部接触环境的动力学模型。
5、第二步:基于动力学模型,使用时域无源方法,在主端力反馈设备和从端机器人之间的通信信道建立时延能量网络,通过时延能量网络调整主端力反馈设备和从端机器人在通信信道中传输的力和速度信号,以实现双边遥操作系统的稳定性。
6、第三步:使用四通道通信信道架构,将主端力反馈设备经时延能量网络调整后的力和速度信号以及操作者的作用力共同输入四通道通信信道架构中的增益模块中,增益模块处理后输出主端力反馈设备的外部作用力;将从端机器人经时延能量网络调整后的力和速度信号以及外部接触环境的作用力共同输入四通道通信信道架构中的增益模块中,增益模块处理后输出从端机器人的从端力反馈设备的外部作用力,以实现双边遥操作系统的透明性,实现主端力反馈设备和从端力反馈设备的外部作用力的识别。
7、第四步:将四通道通信信道架构和时域无源方法结合构建双边遥操作系统,在通信信道的信号传输过程中,使用由位置和速度信息共同编码的等效速度信号替代通信信道中的速度信号进行传输。
8、第五步:建立从端等效比例控制器以及无源性约束下的主、从端反馈无源控制器;将等效速度信号输入从端等效比例控制器中,从端等效比例控制器输出从端等效控制力对从端机器人进行控制;将主端力反馈设备和从端机器人的位置输入主、从端反馈无源控制器中,主、从端反馈无源控制器输出主端力反馈设备和从端机器人受到的内部控制力对主端力反馈设备和从端机器人进行控制,实现主端力反馈设备和从端机器人的时延双边遥操作控制。从端等效比例控制器以解决位置漂移的问题,主、从端反馈无源控制器以解决时域无源方法中无源性与等效速度信号无关的问题。
9、所述的第一步中,双边遥操作系统由操作者、主端力反馈设备、从端机器人和外部接触环境构成,主端力反馈设备和从端机器人的力和速度信号通过通信信道相互传输;双边遥操作系统中操作者、主端力反馈设备、从端机器人和外部接触环境的动力学模型具体如下:
10、miai+bivi=ficon+fiext,i=m,s
11、fj=bjvj+kjxj,j=h,e
12、其中,mi表示主端力反馈设备或从端机器人的质量,i=m表示参数对应为主端力反馈设备的参数,i=s表示参数对应为从端机器人的参数,mm和ms分别表示主端力反馈设备和从端机器人的质量;ai和vi分别表示主端力反馈设备或从端机器人的加速度和速度,am和vm分别表示主端力反馈设备的加速度和速度,as和vs分别表示从端机器人的加速度和速度;bi表示主端力反馈设备或从端机器人的阻尼系数,bm和bs分别表示主端力反馈设备和从端机器人的阻尼系数;ficon表示主端力反馈设备或从端机器人受到的内部控制力,和分别表示主端力反馈设备和从端机器人受到的内部控制力;fiext表示主端力反馈设备或从端机器人受到的外部作用力,和分别表示主端力反馈设备和从端机器人受到的外部作用力,对主端和从端而言分别为fh和fe;fj表示操作者或外部接触环境的作用力,和对应的主端力反馈设备或从端机器人受到的外部作用力fiext相同,j=h表示参数对应为人类操作者的参数,j=e表示参数对应为外部接触环境的参数,fh表示操作者的作用力,即为主端力反馈设备受到的外部作用力fe表示外部接触环境的作用力,即为从端机器人受到的外部作用力bj和kj分别表示操作者或外部接触环境的阻尼系数和弹性系数,bh和kh分别表示操作者的阻尼系数和弹性系数,be和ke分别表示外部接触环境的阻尼系数和弹性系数;vj和xj分别表示操作者与主端力反馈设备之间相互作用或外部接触环境与从端机器人之间相互作用的速度和位置,vh和xh分别表示操作者与主端力反馈设备之间相互作用的速度和位置,ve和xe分别表示外部接触环境与从端机器人之间相互作用的速度和位置,在无相对运动的情况下有ve=vs,xe=xs。
13、所述的第二步中,时延能量网络包括正向时延能量网络和反向时延能量网络,正向时延能量网络包括自身的两个端口两侧的正向无源观测器和正向无源控制器,反向时延能量网络均包括自身的两个端口两侧的反向无源观测器和反向无源控制器。
14、在正向时延能量网络中,主端力反馈设备的速度vm自一侧端口输入,从端机器人受到的外部接触环境的作用力fe自另一侧端口输入,经过时延和正向无源控制器调整的从端机器人受到的外部作用力fed自一侧端口输出,经过时延和正向无源控制器调整后的主端力反馈设备的速度vmd自另一侧端口输出。
15、在反向时延能量网络中,主端力反馈设备受到的操作者的作用力fh自一侧端口输入,从端机器人的速度vs自另一侧端口输入,经过时延和反向无源控制器调整后的从端机器人的速度vsd自一侧端口输出,经过时延和反向无源控制器调整后的主端力反馈设备受到的外部作用力fhd自另一侧端口输出。
16、所述的正向时延能量网络中,输入的主端力反馈设备的速度vm和从端机器人受到的外部接触环境的作用力fe首先经过时延,具体如下:
17、
18、其中,表示t时刻经过时延后的主端力反馈设备的速度信号;tf1(t)表示t时刻正向时延能量网络由一侧向另一侧的传输时延;表示t时刻经过时延后的从端机器人受到的外部接触环境的作用力信号;tb1(t)表示t时刻正向时延能量网络由另一侧向一侧的传输时延。
19、然后使用正向时延能量网络两端口一侧的第二正向无源控制器调整经过时延后的主端力反馈设备的速度信号使用另一侧的第一正向无源控制器调整经过时延后的从端机器人受到的外部接触环境的作用力信号具体如下:
20、
21、其中,fed表示经过第一正向无源控制器调整后的从端机器人受到的外部作用力,vmd表示经过第二正向无源控制器调整后的主端力反馈设备的速度;和分别表示第一正向无源控制器的控制系数和第二正向无源控制器的控制系数;和分别表示正向时延能量网络两端口一侧的第一正向无源观测器观测的正向时延能量网络耗散的能量以及另一侧的第二正向无源观测器观测的正向时延能量网络耗散的能量。
22、所述的第一正向无源观测器观测的正向时延能量网络耗散的能量以及第二正向无源观测器观测的正向时延能量网络耗散的能量具体如下:
23、
24、其中,b表示无源性系数,用于联系不同量纲的力和速度;∈表示时延系数,代表了时变的时延对时间导数的保守估计值。
25、和均为非负时,可以保证正向时延能量网络的无源性,即保证vm和fe这两条通信信道的无源性。
26、所述的反向时延能量网络中,输入的主端力反馈设备受到的操作者的作用力fh和从端机器人的速度vs首先经过时延,具体如下:
27、
28、其中,表示t时刻经过时延后的主端力反馈设备受到的外部作用力信号;tf2(t)表示t时刻反向时延能量网络由一侧向另一侧的传输时延;表示t时刻经过时延后的从端机器人的速度信号;tb2(t)表示t时刻反向时延能量网络由另一侧向一侧的传输时延。
29、然后使用反向时延能量网络两端口一侧的第一反向无源控制器调整经过时延后的主端力反馈设备受到的外部作用力信号使用另一侧的第二反向无源控制器调整经过时延后的经过时延后的从端机器人的速度信号具体如下:
30、
31、其中,vsd表示经过第二反向无源控制器调整后的从端机器人的速度,fhd表示经过第一反向无源控制器调整后的主端力反馈设备受到的外部作用力;和分别表示第二反向无源控制器的控制系数和第一反向无源控制器的控制系数;和分别表示反向时延能量网络两端口一侧的第一反向无源观测器观测的反向时延能量网络耗散的能量以及另一侧的第二反向无源观测器观测的反向时延能量网络耗散的能量。
32、在时延的作用下,时延能量网络的无源性不一定成立,因此建立反向无源控制器来调整传输的力和速度信号和为vsd和fhd,无源控制器保证了经过无源控制器调整后的信号始终非负,即保证vs和fh这两条通信信道的无源性。
33、所述的反向时延能量网络两端口一侧的第一反向无源观测器观测的反向时延能量网络耗散的能量以及另一侧的第二反向无源观测器观测的反向时延能量网络耗散的能量具体如下:
34、
35、其中,b表示无源性系数;∈表示时延系数。
36、和均为非负时,可以保证反向时延能量网络的无源性,即保证vs和fh这两条通信信道的无源性。
37、所述的第三步中,对于主端力反馈设备,发送主端力反馈设备的速度vm和主端力反馈设备受到的外部作用力fh,接收经过时延和第二反向无源控制器调整后的从端机器人的速度vsd以及经过时延和第一反向无源控制器调整的从端机器人受到的外部作用力fed,然后与操作者的作用力fh共同输入增益模块中,增益模块处理后输出主端力反馈设备的外部作用力具体如下:
38、
39、其中,c2、c4和c6分别表示增益模块的第二、第四和第六个四通道增益系数。
40、对于从端机器人,发送从端机器人的速度vs和从端机器人受到的外部作用力fe,接收经过时延和第二正向无源控制器调整后的主端力反馈设备的速度vmd和经过时延和第一正向无源控制器调整后的主端力反馈设备受到的外部作用力fhd,然后与外部接触环境的作用力fe共同输入至增益模块中,增益模块处理后输出从端机器人的从端力反馈设备的外部作用力具体如下:
41、
42、其中,c1、c3和c5分别表示增益模块的第一、第三和第五个四通道增益系数;表示从端机器人的等效控制力;kpr表示等效增益系数。
43、所述的第四步中,等效速度信号具体如下:
44、ri=vi+λxi,i=m,s
45、其中,ri表示等效速度信号,rm和rs分别表示主端力反馈设备的速度vm和从端机器人的速度vs的等效速度信号;λ表示等效速度系数;xi表示主端力反馈设备或从端机器人的位置,xm和xs分别表示主端力反馈设备和从端机器人的位置。
46、所述的第五步中,通过对等效速度信号的定义,位置信息与速度信息可以一起编码,并建立从端等效比例控制器来恢复准确的位置跟踪,从端等效比例控制器具体如下:
47、
48、其中,表示从端等效比例控制器调整后的从端机器人的等效控制力;kpr表示等效增益系数;rmd表示经过第一正向无源控制器调整后的主端力反馈设备的速度vmd的等效速度信号,rs表示从端机器人的速度vs的等效速度信号。
49、在引入等效速度信号后,建立的原本对于速度具有无源性的主端力反馈设备动力学模型和从端机器人动力学模型对等效速度信号不再具有无源性,因此需要调整动力学模型以确保主端力反馈设备和从端机器人的无源性。
50、主、从端反馈无源控制器具体如下:
51、ficon=fifpc,i=m,s
52、
53、其中,ficon表示主端力反馈设备或从端机器人受到的内部控制力,和分别表示主端力反馈设备和从端机器人受到的内部控制力;fifpc表示主端力反馈设备或从端机器人的反馈无源控制力,和分别表示主端力反馈设备和从端机器人的反馈无源控制力,ficon和二者相等,即主端力反馈设备或从端机器人受到的内部控制力为反馈无源控制力;bi和ki分别表示主端力反馈设备或从端机器人的反馈无源阻尼系数和反馈无源增益系数,bm和km分别表示主端力反馈设备的反馈无源阻尼系数和反馈无源增益系数,bs和ks表示从端机器人的反馈无源阻尼系数和反馈无源增益系数;xi表示主端力反馈设备或从端机器人的位置,xm和xs分别表示主端力反馈设备和从端机器人的位置,表示主端力反馈设备或从端机器人的位置的导数,和分别表示主端力反馈设备和从端机器人的位置的导数。
54、无源性约束具体如下:
55、bi+bi>λmi,λ>0,ki>0
56、其中,bi表示主端力反馈设备或从端机器人的阻尼系数,bm和bs分别表示主端力反馈设备和从端机器人的阻尼系数;λ表示等效速度系数;mi表示主端力反馈设备或从端机器人的质量,mm和ms分别表示主端力反馈设备和从端机器人的质量。
57、本发明的有益效果是:
58、1、本发明使用时域无源方法,建立包含无源观测器和无源控制器的时延能量网络,在通信信道存在时变时延的条件下保证遥操作系统的稳定性,确保人类操作者操控机械臂时的安全性。
59、2、本发明建立四通道的通信架构,将主、从端位置和速度信息分别通过通信信道传输,提升遥操作系统的透明性,便于人类操作者实时感知外部接触环境并做出反应。
本文地址:https://www.jishuxx.com/zhuanli/20241009/307919.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表