一种电子导向胶轮列车静态编组运行速度的安全防护方法与流程
- 国知局
- 2024-10-15 09:53:50
本发明涉及自动驾驶,更具体的说,涉及一种面向虚拟联挂的电子导向胶轮列车静态编组运行速度的安全防护方法。
背景技术:
1、随着城市交通拥堵问题日益突出,多种公共交通解决方案被提出,包括地铁、brt(快速公交系统)、轻轨和电子导向胶轮列车等。其中以电子导向胶轮列车为核心运载工具的智能轨道快运系统具有建设周期短、基础设施投资小、城市适应性高、综合运力强等优势特点,具有较好的应用前景。
2、虚拟联挂的电子导向胶轮列车静态编组,通过多个独立的电子导向胶轮列车形成联挂编组,编组内部的电子导向胶轮列车之间通过无线车车通信交互车辆性能和状态信息,在协同规划与控制策略下实现如同机械耦合地近间隔运行。
3、电子导向胶轮列车运行速度的安全防护对安全行驶有着重要的作用。电子导向胶轮列车在编组运行时,车辆追踪间距较小,对行驶的安全性形成了更大的挑战。
4、因此,目前亟需一种面向虚拟联挂的电子导向胶轮列车静态编组运行速度的安全防护方法。
技术实现思路
1、本发明的目的是提供一种面向虚拟联挂的电子导向胶轮列车静态编组运行速度的安全防护方法,解决现有技术中缺乏虚拟联挂的电子导向胶轮列车静态编组的行驶安全的问题。
2、为了实现上述目的,本发明提供了一种电子导向胶轮列车静态编组运行速度的安全防护方法,包括以下步骤:
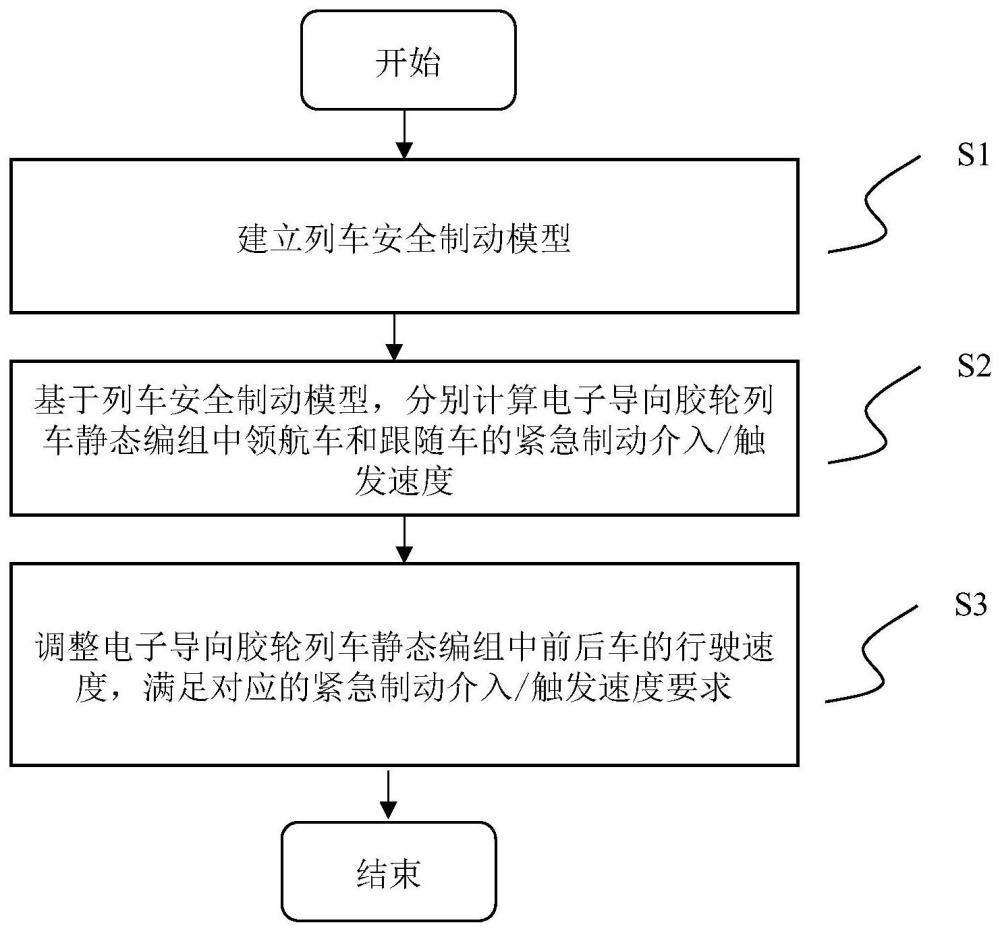
3、步骤s1、建立列车安全制动模型,所述列车安全制动模型为安全制动曲线,所述安全制动曲线包括紧急制动曲线;
4、步骤s2、基于列车安全制动模型,分别计算电子导向胶轮列车静态编组中领航车和跟随车的紧急制动介入/触发速度;
5、步骤s3、调整电子导向胶轮列车静态编组中前后车的行驶速度,满足对应的紧急制动介入/触发速度要求。
6、在一实施例中,所述紧急制动曲线,包括以下阶段:
7、a段,即控制设备响应阶段;
8、b段,即牵引切除阶段;
9、c段,即惰行阶段;
10、d段,即紧急制动建立阶段;
11、e段,即完全紧急制动阶段。
12、在一实施例中,所述基于列车安全制动模型,计算电子导向胶轮列车静态编组中领航车的紧急制动介入/触发速度,进一步包括:
13、基于前方目标停车点,以车辆在启动紧急制动后最长紧急制动行驶距离能达到的最远停车点不越过目标停车点为约束条件,计算第一最大当前速度;
14、基于顶棚速度,以车辆在启动紧急制动后最长紧急制动行驶距离能达到的最大速度不大于顶棚速度为约束条件,计算第二最大当前速度;
15、取第一最大当前速度与第二最大当前速度中的最小值,作为领航车的紧急制动介入/触发速度。
16、在一实施例中,所述基于列车安全制动模型,计算电子导向胶轮列车静态编组中跟随车的紧急制动介入/触发速度,进一步包括:
17、基于前方目标停车点,以车辆在启动紧急制动后最长紧急制动行驶距离能达到的最远停车点不越过目标停车点为约束条件,计算第一最大当前速度;
18、基于顶棚速度,以车辆在启动紧急制动后最长紧急制动行驶距离能达到的最大速度不大于顶棚速度为约束条件,计算第二最大当前速度;
19、基于相对制动距离模型,以车辆在启动紧急制动后最长紧急制动行驶距离停车终点不越过前车尾部为约束条件,计算第三最大当前速度;
20、取第一最大当前速度、第二最大当前速度、第三最大当前速度的最小值,作为跟随车的紧急制动介入/触发速度。
21、在一实施例中,所述最长紧急制动行驶距离,进一步通过以下步骤计算:
22、采用修正系数λb和相对误差δb对车辆基本阻力加速度ab进行修正;
23、在ab段采用车辆最大牵引加速度atm的相对误差上限+δatm,计算车辆最长紧急制动行驶距离;
24、在de段分别采用车辆紧急制动建立时间内的当量加速度abb、车辆紧急制动满量加速度abm的相对误差下限-δbm,计算车辆最长紧急制动行驶距离;
25、车辆在指定安全功能失效时,车辆紧急制动建立时间内的当量加速度abb、车辆紧急制动满量加速度abm衰减为原来的β。
26、在一实施例中,所述第一最大当前速度,对应的表达式为:
27、
28、其中,δvm为车辆测速相对误差上限;
29、δsm为车辆位置测量绝对误差上限;
30、sc为车辆检测到当前与前方目标停车点的距离;
31、p0、p1、p2为紧急制动曲线的第一加速度参数、第二加速度参数和第三加速度参数。
32、在一实施例中,所述顶棚速度为最小的安全速度限制值,取车辆自身结构限速、车辆故障情况下限制速度、线路静态限制速度、线路临时限制速度、授权移动范围内危险点对应的限制速度的最小值。
33、在一实施例中,所述第二最大当前速度,满足以下约束条件:
34、在上坡或平坡行驶场景下,c段的初始车速均不高于最小的安全速度限制值;
35、在下坡行驶场景下,d段的车速在紧急制动力与弯道阻力和坡道阻力的合力相等时达到最大,车辆做近似匀加加速运动。
36、在一实施例中,所述第二最大当前速度,对应的表达式为:
37、
38、其中,δvm为车辆测速相对误差上限;
39、vlim为最小的安全速度限制值;
40、atm为车辆最大牵引加速度;
41、aα为坡道阻力加速度;
42、aρ为道路弯曲阻力加速度;
43、ttrm为车辆牵引切除时间;
44、trsp为车辆vobc(vehicle on-board controller,车载控制器)的最大响应时间;
45、γa为冲击率;
46、tidl为车辆惰行时间。
47、δatm为atm的最相对误差上限。
48、在一实施例中,所述相对制动距离模型,进一步包括:
49、计算前车最短紧急制动行驶距离;
50、计算前车最长紧急制动行驶距离。
51、在一实施例中,所述计算前车最短紧急制动行驶距离,进一步包括:
52、基于前车当前车速按列车安全制动模型中的de段计算前车的最短紧急制动行驶距离;
53、前车在d段的起始位置通过当前制动气压值pfr、空载紧急制动最大气压值pem_fr进行估算;
54、前车在d段做近似匀加加速运动;
55、在d段,基于前车当前速度vfr的相对误差δv_fr,采用vfr的相对误差下限-δvm_fr,计算车辆的最短紧急制动距离;
56、在de段,基于前车紧急制动加速度abb_fr、abm_fr的相对误差δb_fr,分别采用abb_fr、abm_fr的相对误差上限+δbm_fr,计算车辆的最短紧急制动距离。
57、在一实施例中,所述第三最大当前速度,对应的表达式为:
58、
59、其中,tcdm为最大车车通信延迟;
60、sm0为跟随车与前车的静态安全距离;
61、dcm为当前跟随车与前车的测量间距;
62、sem_fr为前车紧急制动行驶距离;
63、p0、p1、p2为紧急制动曲线的第一加速度参数、第二加速度参数和第三加速度参数。
64、本发明提供一种电子导向胶轮列车静态编组运行速度的安全防护方法,考虑领航车与跟随车的紧急制动介入/触发(emergency brake intervention,ebi)速度的安全防护,使电子导向胶轮列车前后车在虚拟联挂协同控制运行过程中的行驶速度低于ebi速度,前后车的行驶速度维持在安全速度内,避免车辆发生碰撞,保证行车的安全性。
本文地址:https://www.jishuxx.com/zhuanli/20241015/315704.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表