一种车辆自动行驶至安全区域的控制方法及装置与流程
- 国知局
- 2024-10-21 14:39:50
本申请属于车辆行驶安全领域,尤其涉及一种车辆自动行驶至安全区域的控制方法及装置。
背景技术:
1、随着我国科技和经济水平的持续提高,城市交通得到了飞速的发展。在这一背景下,道路上的车辆类型和数量不断增加,使得交通流变得更加复杂和繁忙。特别是在高速公路上,由于车速较快、车流密集,小车在行驶车道内突然停车的情况时有发生。这种意外的停车行为极易导致后方车辆无法及时作出反应,从而引发追尾事故。
2、追尾事故的发生,不仅会对驾驶员和乘客的生命安全构成严重威胁,还可能造成货物损坏、道路拥堵等严重后果,给社会带来巨大的经济损失。由于高速公路和城市快速路的特点,一旦发生追尾事故,往往会涉及多辆车,造成连环碰撞,进一步加剧了事故的严重性。
技术实现思路
1、本申请的目的在于克服上述现有技术中,提供一种车辆自动行驶至安全区域的控制方法及装置。
2、本申请提供一种车辆自动行驶至安全区域的控制方法,包括:
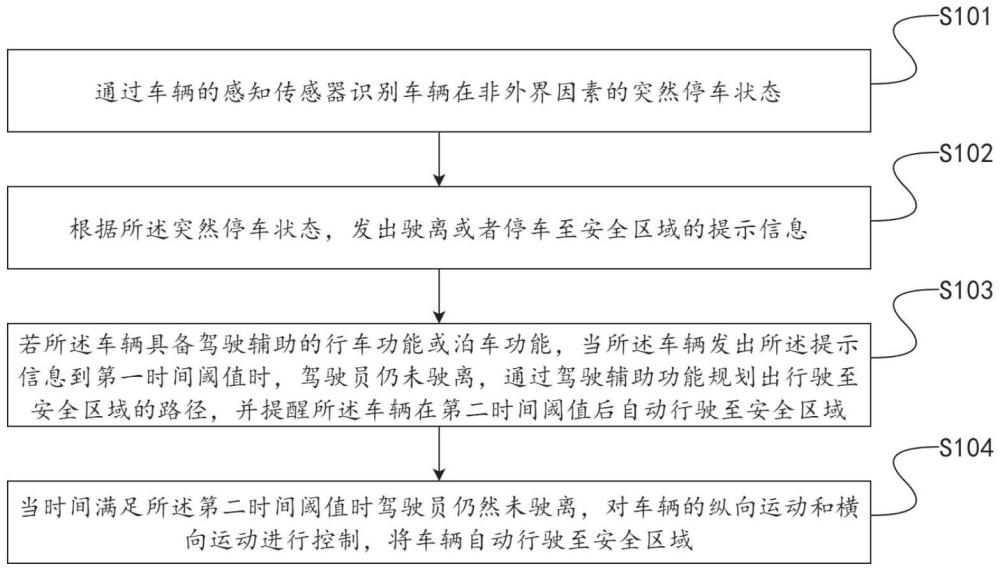
3、通过车辆的感知传感器识别车辆在非外界因素的突然停车状态;
4、根据所述突然停车状态,发出驶离或者停车至安全区域的提示信息;
5、若所述车辆具备驾驶辅助的行车功能或泊车功能,当所述车辆发出所述提示信息到第一时间阈值时,驾驶员仍未驶离,通过驾驶辅助功能规划出行驶至安全区域的路径,并提醒所述车辆在第二时间阈值后自动行驶至安全区域;
6、当时间满足所述第二时间阈值时驾驶员仍然未驶离,对车辆的纵向运动和横向运动进行控制,将车辆自动行驶至安全区域。
7、可选地,所述感知传感器,包括:
8、定位传感器、imu传感器、智能驾驶系统的摄像头传感器、4d毫米波雷达、激光雷达、超声波雷达、惯性传感器、全球定位系统。
9、可选地,所述突然停车状态,包括:
10、在高速、快速路或城市道路的行驶车道上的停车状态。
11、可选地,根据所述突然停车状态,发出驶离或者停车至安全区域的提示信息,包括:发出报警,包括双闪和/或鸣笛。
12、可选地,所述安全区域,包括:
13、高速公路的应急车道,城市快速路和城市道路的马路边。
14、本申请还提供一种车辆自动行驶至安全区域的控制装置,包括:
15、识别模块,用于通过车辆的感知传感器识别车辆在非外界因素的突然停车状态;
16、警报模块,用于根据所述突然停车状态,发出驶离或者停车至安全区域的提示信息;
17、第一判断模块,用于若所述车辆具备驾驶辅助的行车功能或泊车功能,当所述车辆发出所述提示信息到第一时间阈值时,驾驶员仍未驶离,通过驾驶辅助功能规划出行驶至安全区域的路径,并提醒所述车辆在第二时间阈值后自动行驶至安全区域;
18、第二判断模块,用于当时间满足所述第二时间阈值时驾驶员仍然未驶离,对车辆的纵向运动和横向运动进行控制,将车辆自动行驶至安全区域。
19、可选地,所述感知传感器,包括:
20、定位传感器、imu传感器、智能驾驶系统的摄像头传感器、4d毫米波雷达、激光雷达、超声波雷达、惯性传感器、全球定位系统。
21、可选地,所述突然停车状态,包括:
22、在高速、快速路或城市道路的行驶车道上的停车状态。
23、可选地,所述警报模块根据所述突然停车状态,发出驶离或者停车至安全区域的提示信息,包括:发出报警,包括双闪和/或鸣笛。
24、可选地,所述安全区域,包括:
25、高速公路的应急车道,城市快速路和城市道路的马路边。
26、本申请的有益效果是:
27、本申请提供一种车辆自动行驶至安全区域的控制方法,包括:通过车辆的感知传感器识别车辆在非外界因素的突然停车状态;根据所述突然停车状态,发出驶离或者停车至安全区域的提示信息;若所述车辆具备驾驶辅助的行车功能或泊车功能,当所述车辆发出所述提示信息到第一时间阈值时,驾驶员仍未驶离,通过驾驶辅助功能规划出行驶至安全区域的路径,并提醒所述车辆在第二时间阈值后自动行驶至安全区域;当时间满足所述第二时间阈值时驾驶员仍然未驶离,对车辆的纵向运动和横向运动进行控制,将车辆自动行驶至安全区域。本申请通过利用定位传感器,实现了对自车在行驶过程中非外界因素突然停车场景的识别,并通过报警系统提醒驾驶员尽快驶离或停车至安全区域。此外,如果车辆具备驾驶辅助的行车功能或泊车功能,系统还可以规划出行驶至安全区域的路径,并在驾驶员未及时驶离的情况下,自动将车辆行驶至安全区域,从而大大降低了追尾事故的发生率,保障了驾驶员、乘客和货物的安全。
技术特征:1.一种车辆自动行驶至安全区域的控制方法,其特征在于,包括:
2.根据权利要求1所述车辆自动行驶至安全区域的控制方法,其特征在于,所述感知传感器,包括:
3.根据权利要求1所述车辆自动行驶至安全区域的控制方法,其特征在于,所述突然停车状态,包括:
4.根据权利要求1所述车辆自动行驶至安全区域的控制方法,其特征在于,根据所述突然停车状态,发出驶离或者停车至安全区域的提示信息,包括:发出报警,包括双闪和/或鸣笛。
5.根据权利要求1所述车辆自动行驶至安全区域的控制方法,其特征在于,所述安全区域,包括:
6.一种车辆自动行驶至安全区域的控制装置,其特征在于,包括:
7.根据权利要求6所述车辆自动行驶至安全区域的控制装置,其特征在于,所述感知传感器,包括:
8.根据权利要求6所述车辆自动行驶至安全区域的控制装置,其特征在于,所述突然停车状态,包括:
9.根据权利要求6所述车辆自动行驶至安全区域的控制装置,其特征在于,所述警报模块根据所述突然停车状态,发出驶离或者停车至安全区域的提示信息,包括:发出报警,包括双闪和/或鸣笛。
10.根据权利要求6所述车辆自动行驶至安全区域的控制装置,其特征在于,所述安全区域,包括:
技术总结本申请提出一种车辆自动行驶至安全区域的控制方法及装置,该方法包括:利用感知传感器识别非外界因素导致的突然停车,即时提醒驶离或停至安全区。若车辆具驾驶辅助功能且驾驶员未响应提示,系统规划安全路径,并在第二时间阈值后自动导航至安全区。此方法结合定位传感器,有效识别并应对突发停车,通过自动避险降低追尾风险,保障人员与货物安全。技术研发人员:徐明海,王金川,孙茂,柯云俊,郭芳津受保护的技术使用者:奇瑞新能源汽车股份有限公司技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/318884.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。