碰撞风险识别方法、装置、电子设备及存储介质与流程
- 国知局
- 2024-11-19 09:47:50
本发明实施例涉及自动驾驶,尤其涉及一种碰撞风险识别方法、装置、电子设备及存储介质。
背景技术:
1、随着科技的迅猛发展,无人驾驶技术正逐渐从实验室走向商业化应用,成为改变未来交通方式的关键技术之一。在这一进程中,无人驾驶车辆的路径规划和速度规划技术显得尤为重要,它们是确保车辆安全、高效运行的核心。
2、在无人驾驶车辆的路径规划中,环境感知是基础,而障碍物的检测与评估则是环境感知的重要组成部分。在无障碍物的理想情况下,车辆可以沿着车道中心线平稳行驶。但在实际道路环境中,障碍物的存在是常态,这些障碍物可能是静止的,如路边的停放车辆、施工区域,也可能是动态的,如行人、其他车辆等,这些障碍物的存在不仅影响车辆的正常行驶,还可能带来安全隐患。因此,为了确保车辆及时做出避障决策,确保车辆行驶的安全性,如何提高车辆与障碍物之间的碰撞风险识别的准确率和效率显得尤为重要。
技术实现思路
1、本发明的目的之一在于提供一种碰撞风险识别方法,以解决现有的碰撞风险识别方法存在碰撞风险识别准确率低、效率低的问题,提高碰撞风险识别的准确率和效率;目的之二在于提供一种碰撞风险识别装置;目的之三在于提供一种电子设备;目的之四在于提供一种存储介质。
2、为了实现上述目的,本发明采用的技术方案如下:
3、本发明实施例第一方面提供了一种碰撞风险识别方法,所述方法包括:
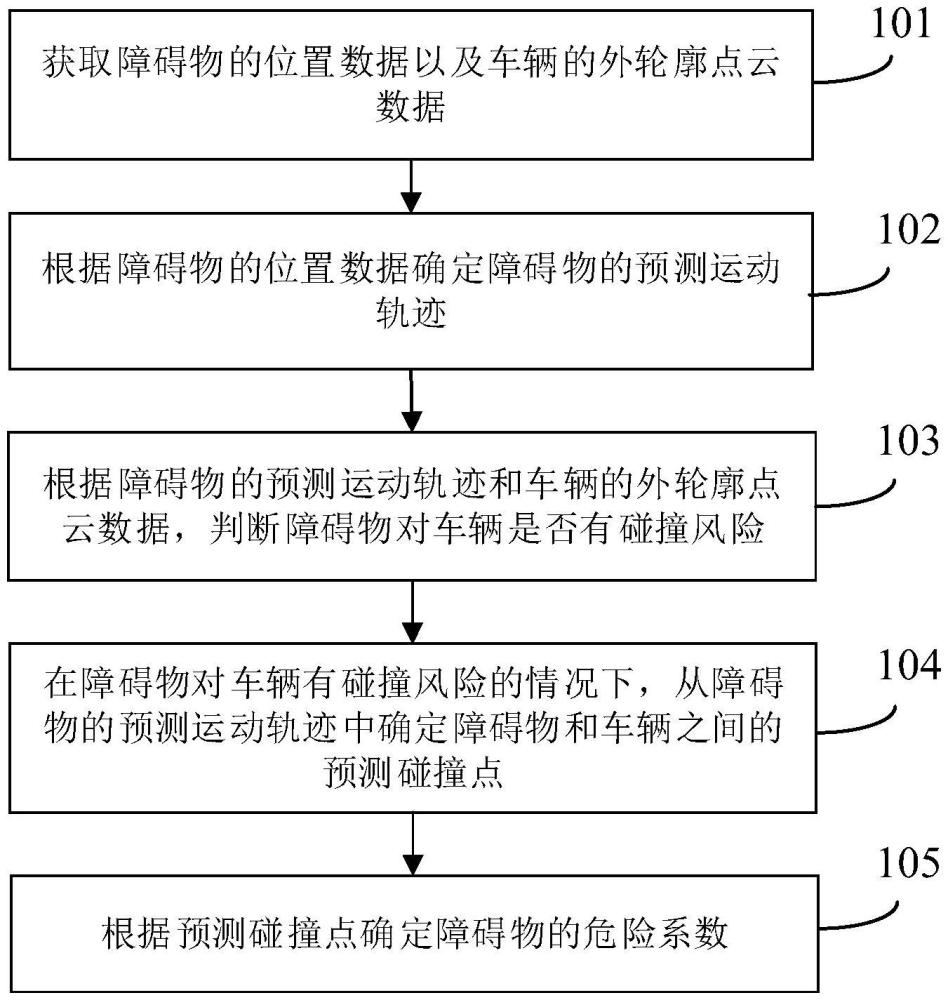
4、获取障碍物的位置数据以及车辆的外轮廓点云数据;
5、根据所述障碍物的位置数据确定所述障碍物的预测运动轨迹;
6、根据所述障碍物的预测运动轨迹和所述车辆的外轮廓点云数据,判断所述障碍物对所述车辆是否有碰撞风险;
7、在所述障碍物对所述车辆有碰撞风险的情况下,从所述障碍物的预测运动轨迹中确定所述障碍物和所述车辆之间的预测碰撞点;
8、根据所述预测碰撞点确定所述障碍物的危险系数。
9、可选地,所述获取障碍物的位置数据包括:
10、通过车辆上的传感器获取障碍物的第一位置数据,其中,所述第一位置数据为所述障碍物在预先建立的传感器坐标系下的位置数据;
11、获取所述传感器的位姿数据,其中,所述传感器的位姿数据为所述传感器在预先建立的车辆坐标系下的位姿数据;
12、根据所述障碍物的第一位置数据和所述传感器的位姿数据,确定所述障碍物的位置数据,其中,所述障碍物的位置数据为所述障碍物在预先建立的车辆坐标系下的位置数据。
13、可选地,所述根据所述障碍物的位置数据确定所述障碍物的预测运动轨迹包括:
14、获取当前时刻所述障碍物的位置数据以及前一时刻所述障碍物的位置数据;
15、获取所述当前时刻和所述前一时刻之间的时间差值;
16、根据当前时刻所述障碍物的位置数据和前一时刻所述障碍物的位置数据,确定所述障碍物的位移;
17、根据所述障碍物的位移和所述时间差值,确定所述障碍物相对于所述车辆的相对速度;
18、根据所述相对速度、预设的预测时间以及当前时刻所述障碍物的位置数据,确定所述障碍物的预测运动轨迹。
19、可选地,所述根据所述障碍物的预测运动轨迹和所述车辆的外轮廓点云数据,判断所述障碍物对所述车辆是否有碰撞风险包括:
20、预先建立所述障碍物的障碍物坐标系,其中,所述障碍物坐标系的x负半轴与所述障碍物的速度方向相反;
21、根据所述障碍物的位置数据和所述车辆的外轮廓点云数据,确定距离所述障碍物最近的第一外轮廓点,并将所述第一外轮廓点确定为第一候选碰撞点,其中,所述车辆的外轮廓点云数据包括若干所述外轮廓点的位置数据;
22、根据所述第一候选碰撞点和所述障碍物的预测运动轨迹,确定距离所述第一候选碰撞点最近的第一障碍物轨迹预测点,并将所述第一障碍物轨迹预测点确定为第一轨迹预测点,其中,所述障碍物的预测运动轨迹包括若干所述障碍物轨迹预测点;
23、判断所述第一轨迹预测点是否处于所述障碍物坐标系的x负半轴;
24、若所述第一轨迹预测点处于所述障碍物坐标系的x负半轴,则确定所述障碍物对所述车辆无碰撞风险;
25、若所述第一轨迹预测点未处于所述障碍物坐标系的x负半轴,则确定所述障碍物对所述车辆有碰撞风险。
26、可选地,所述从所述障碍物的预测运动轨迹中确定所述障碍物和所述车辆之间的预测碰撞点包括:
27、根据所述第一轨迹预测点和所述车辆的外轮廓点云数据,确定距离所述第一轨迹预测点最近的第二外轮廓点,并将所述第二外轮廓点确定为第二候选碰撞点;
28、根据所述第二候选碰撞点和所述障碍物的预测运动轨迹,确定距离所述第二候选碰撞点最近的第二障碍物轨迹预测点,并将所述第二障碍物轨迹预测点确定为第二轨迹预测点;
29、获取所述第一轨迹预测点的位置数据和所述第二轨迹预测点的位置数据;
30、根据所述第一轨迹预测点的位置数据和所述第二轨迹预测点的位置数据,确定所述第一轨迹预测点和所述第二轨迹预测点之间的距离;
31、若所述第一轨迹预测点和所述第二轨迹预测点之间的距离小于预设的距离阈值,则确定所述第一轨迹预测点为预测碰撞点;
32、若所述第一轨迹预测点和所述第二轨迹预测点之间的距离大于等于所述距离阈值,则根据所述第二轨迹预测点和所述车辆的外轮廓点云数据,确定距离所述第二轨迹预测点最近的第三外轮廓点,并将所述第三外轮廓点确定为第三候选碰撞点。
33、可选地,所述所述从所述障碍物的预测运动轨迹中确定所述障碍物和所述车辆之间的预测碰撞点包括:
34、分别确定所述车辆的外轮廓点和所述障碍物轨迹预测点之间的距离;
35、根据所述距离确定最近距离;
36、在所述障碍物的预测运动轨迹中确定所述最近距离对应的所述障碍物轨迹预测点,并将所述最近距离对应的所述障碍物轨迹预测点作为预测碰撞点。
37、可选地,所述根据所述预测碰撞点确定所述障碍物的危险系数包括:
38、预先获取所述预测碰撞点的位置数据以及所述障碍物的障碍物类型;
39、预先建立障碍物类型与风险系数之间的对应关系;
40、根据所述障碍物的障碍物类型以及所述障碍物类型与所述风险系数之间的对应关系,确定所述障碍物的风险系数;
41、根据所述障碍物的位置数据和所述预测碰撞点的位置数据,确定碰撞距离;
42、根据所述障碍物相对于所述车辆的相对速度、所述障碍物的风险系数以及所述碰撞距离,确定所述障碍物的危险系数。
43、本发明实施例第二方面提供了一种碰撞风险识别装置,所述装置包括:
44、数据获取模块,用于获取障碍物的位置数据以及车辆的外轮廓点云数据;
45、轨迹预测模块,用于根据所述障碍物的位置数据确定所述障碍物的预测运动轨迹;
46、碰撞风险判断模块,用于根据所述障碍物的预测运动轨迹和所述车辆的外轮廓点云数据,判断所述障碍物对所述车辆是否有碰撞风险;
47、预测碰撞点确定模块,用于在所述障碍物对所述车辆有碰撞风险的情况下,从所述障碍物的预测运动轨迹中确定所述障碍物和所述车辆之间的预测碰撞点;
48、障碍物危险性量化模块,用于根据所述预测碰撞点确定所述障碍物的危险系数。
49、可选地,所述数据获取模块包括:
50、障碍物的第一位置数据获取子模块,用于通过车辆上的传感器获取障碍物的第一位置数据,其中,所述第一位置数据为所述障碍物在预先建立的传感器坐标系下的位置数据;
51、传感器位姿数据获取子模块,用于获取所述传感器的位姿数据,其中,所述传感器的位姿数据为所述传感器在预先建立的车辆坐标系下的位姿数据;
52、障碍物的位置数据获取子模块,用于根据所述障碍物的第一位置数据和所述传感器的位姿数据,确定所述障碍物的位置数据,其中,所述障碍物的位置数据为所述障碍物在预先建立的车辆坐标系下的位置数据。
53、可选地,所述轨迹预测模块包括:
54、位置数据获取子模块,用于获取当前时刻所述障碍物的位置数据以及前一时刻所述障碍物的位置数据;
55、时间差值获取子模块,用于获取所述当前时刻和所述前一时刻之间的时间差值;
56、位移确定子模块,用于根据当前时刻所述障碍物的位置数据和前一时刻所述障碍物的位置数据,确定所述障碍物的位移;
57、相对速度确定子模块,用于根据所述障碍物的位移和所述时间差值,确定所述障碍物相对于所述车辆的相对速度;
58、运动轨迹预测子模块,用于根据所述相对速度、预设的预测时间以及当前时刻所述障碍物的位置数据,确定所述障碍物的预测运动轨迹。
59、可选地,所述碰撞风险判断模块包括:
60、障碍物坐标系建立子模块,用于预先建立所述障碍物的障碍物坐标系,其中,所述障碍物坐标系的x负半轴与所述障碍物的速度方向相反;
61、第一候选碰撞点确定子模块,用于根据所述障碍物的位置数据和所述车辆的外轮廓点云数据,确定距离所述障碍物最近的第一外轮廓点,并将所述第一外轮廓点确定为第一候选碰撞点,其中,所述车辆的外轮廓点云数据包括若干所述外轮廓点的位置数据;
62、第一障碍物轨迹预测点确定子模块,用于根据所述第一候选碰撞点和所述障碍物的预测运动轨迹,确定距离所述第一候选碰撞点最近的第一障碍物轨迹预测点,并将所述第一障碍物轨迹预测点确定为第一轨迹预测点,其中,所述障碍物的预测运动轨迹包括若干所述障碍物轨迹预测点;
63、位置判断子模块,用于判断所述第一轨迹预测点是否处于所述障碍物坐标系的x负半轴;
64、第一碰撞风险判断子模块,用于若所述第一轨迹预测点处于所述障碍物坐标系的x负半轴,则确定所述障碍物对所述车辆无碰撞风险;
65、第二碰撞风险判断子模块,用于若所述第一轨迹预测点未处于所述障碍物坐标系的x负半轴,则确定所述障碍物对所述车辆有碰撞风险。
66、可选地,所述预测碰撞点确定模块包括:
67、第二候选碰撞点确定子模块,用于根据所述第一轨迹预测点和所述车辆的外轮廓点云数据,确定距离所述第一轨迹预测点最近的第二外轮廓点,并将所述第二外轮廓点确定为第二候选碰撞点;
68、第二障碍物轨迹预测点确定子模块,用于根据所述第二候选碰撞点和所述障碍物的预测运动轨迹,确定距离所述第二候选碰撞点最近的第二障碍物轨迹预测点,并将所述第二障碍物轨迹预测点确定为第二轨迹预测点;
69、轨迹预测点位置数据获取子模块,用于获取所述第一轨迹预测点的位置数据和所述第二轨迹预测点的位置数据;
70、相邻轨迹预测点的距离确定子模块,用于根据所述第一轨迹预测点的位置数据和所述第二轨迹预测点的位置数据,确定所述第一轨迹预测点和所述第二轨迹预测点之间的距离;
71、第一预测碰撞点确定子模块,用于若所述第一轨迹预测点和所述第二轨迹预测点之间的距离小于预设的距离阈值,则确定所述第一轨迹预测点为预测碰撞点;
72、第三候选碰撞点确定子模块,用于若所述第一轨迹预测点和所述第二轨迹预测点之间的距离大于等于所述距离阈值,则根据所述第二轨迹预测点和所述车辆的外轮廓点云数据,确定距离所述第二轨迹预测点最近的第三外轮廓点,并将所述第三外轮廓点确定为第三候选碰撞点。
73、可选地,所述预测碰撞点确定模块包括:
74、距离计算子模块,用于分别确定所述车辆的外轮廓点和所述障碍物轨迹预测点之间的距离;
75、最近距离确定子模块,用于根据所述距离确定最近距离;
76、第二预测碰撞点确定子模块,用于在所述障碍物的预测运动轨迹中确定所述最近距离对应的所述障碍物轨迹预测点,并将所述最近距离对应的所述障碍物轨迹预测点作为预测碰撞点。
77、可选地,所述障碍物危险性量化模块包括:
78、位置数据和障碍物类型获取子模块,用于预先获取所述预测碰撞点的位置数据以及所述障碍物的障碍物类型;
79、对应关系建立子模块,用于预先建立障碍物类型与风险系数之间的对应关系;
80、风险系数确定子模块,用于根据所述障碍物的障碍物类型以及所述障碍物类型与所述风险系数之间的对应关系,确定所述障碍物的风险系数;
81、碰撞距离确定子模块,用于根据所述障碍物的位置数据和所述预测碰撞点的位置数据,确定碰撞距离;
82、危险系数确定子模块,用于根据所述障碍物相对于所述车辆的相对速度、所述障碍物的风险系数以及所述碰撞距离,确定所述障碍物的危险系数。
83、本发明实施例第三方面提供一种电子设备,包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如本发明实施例第一方面所述的碰撞风险识别方法的步骤。
84、本发明实施例第四方面提供一种可读存储介质,所述可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如本发明实施例第一方面所述的碰撞风险识别方法的步骤。
85、本发明实施例提供的碰撞风险识别方法,通过获取障碍物的位置数据以及车辆的外轮廓点云数据;根据障碍物的位置数据确定障碍物的预测运动轨迹;根据障碍物的预测运动轨迹和车辆的外轮廓点云数据,判断障碍物对车辆是否有碰撞风险;在障碍物对车辆有碰撞风险的情况下,从障碍物的预测运动轨迹中确定障碍物和车辆之间的预测碰撞点;根据预测碰撞点确定障碍物的危险系数。本发明实施例通过根据障碍物的预测运动轨迹和车辆的外轮廓点云数据去确定预测碰撞点,不仅提高了车辆的环境感知能力,而且还能够准确且快速地确定出预测碰撞点,提高了碰撞风险识别的准确率和效率。另外,本发明实施例基于预测碰撞点确定障碍物的危险系数,实现了对障碍物的危险性进行量化,为后续车辆做出更安全、更合理的驾驶决策提供了更精确的支持。
本文地址:https://www.jishuxx.com/zhuanli/20241118/330277.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。