无人驾驶车辆的感知传感器故障诊断方法和装置与流程
- 国知局
- 2024-11-19 10:04:43
本发明涉及无人驾驶,尤其涉及一种无人驾驶车辆的感知传感器故障诊断方法和装置。
背景技术:
1、在无人驾驶车辆领域,尤其是针对矿区等恶劣环境下24小时全天候运营的宽体车,其高度依赖激光雷达、毫米波雷达、摄像头等多种车载感知传感器以实现精准的环境感知与决策规划。然而,这些车载感知传感器在实际应用中面临着严峻的可靠性挑战。由于矿区环境的特殊性,车载感知传感器不仅需承受极端天气条件,还需应对复杂的地形与持续的振动冲击,导致车载感知传感器及其相关组件(如供电系统、线束连接、板端对接等)易发生故障。相关技术中,存在多种针对车载感知传感器功能性故障的诊断与安全策略制定方案。
2、然而,现有的自动驾驶车辆故障诊断技术主要关注于车载感知传感器是否出现如丢帧、掉线等直接影响其功能使用的故障,而忽视了对车载感知传感器本身故障、供电异常、线束连接问题、板端对接异常、解析错误及环境因素引起故障的深入分析与定位。此外,现有故障诊断方法存在孤立性与监测指标单一性问题,使得涉及软硬件多个模块的复杂故障难以被准确识别与分析。
3、因此,如何准确、高效地实现无人驾驶车辆的车载感知传感器故障的诊断,是亟待解决的技术问题。
技术实现思路
1、针对现有技术中存在的上述问题,本发明提供一种无人驾驶车辆的感知传感器故障诊断方法和装置,用以准确、高效地实现无人驾驶车辆的车载感知传感器故障的诊断。
2、本发明提供一种无人驾驶车辆的感知传感器故障诊断方法,包括:
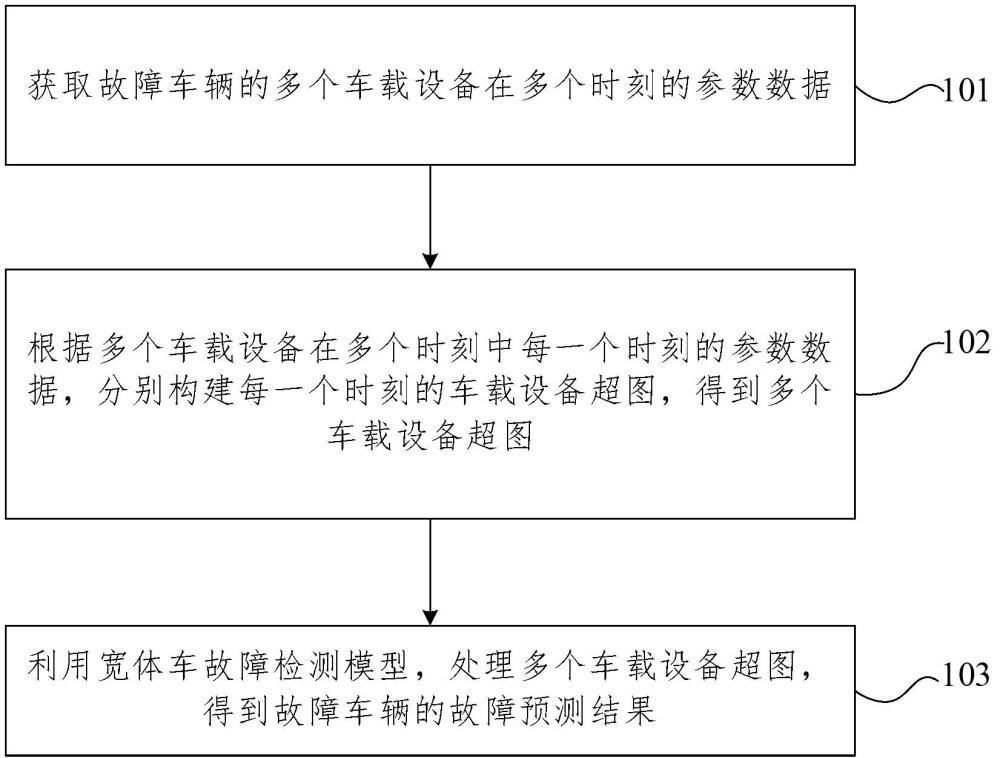
3、获取故障车辆的多个车载设备在多个时刻的参数数据;其中,所述多个车载设备包括:车载感知传感器以及与所述车载感知传感器相关联的车载设备;根据所述多个车载设备在所述多个时刻中每一个时刻的参数数据,分别构建所述每一个时刻的车载设备超图,得到多个车载设备超图;其中,所述车载设备超图包括多个超节点,每一个超节点包括一个子图,所述子图与所述多个车载设备中的一种车载设备对应,所述子图包括至少一个节点,所述节点的值为所述子图对应的车载设备的一种参数数据;利用宽体车故障检测模型,处理所述多个车载设备超图,得到所述故障车辆的故障预测结果;其中,所述宽体车故障检测模型是基于历史故障车辆的多个车载设备的参数数据,对至少一个图注意力网络卷积层、基于时序的神经网络以及多层感知机进行训练得到的。
4、根据本发明提供的一种无人驾驶车辆的感知传感器故障诊断方法,利用以下方式得到所述车载设备超图中各超节点的初始值:针对所述多个车载设备在所述每一个时刻的参数数据,执行如下操作,确定所述时刻的车载设备超图中各超节点的初始值:根据每一个所述车载设备的参数数据,得到所述车载设备超图中每一个所述车载设备对应子图的节点数值;利用预设算法,处理所述车载设备超图中各子图的节点数值,得到所述车载设备超图中各子图的节点特征向量;融合所述车载设备超图中各子图的节点特征向量,得到所述车载设备超图中各个超节点的初始值。
5、根据本发明提供的一种无人驾驶车辆的感知传感器故障诊断方法,所述利用宽体车故障检测模型,处理所述多个车载设备超图,得到所述故障车辆的故障预测结果,包括:利用所述至少一层图注意力网络卷积层,对每一个所述车载设备超图进行迭代处理,得到每一个所述车载设备超图中各个超节点的第一融合特征向量;基于每一个所述车载设备超图中所述车载感知传感器对应超节点的第一融合特征向量,得到所述车载感知传感器在每一个时刻的状态特征;利用所述基于时序的神经网络,基于所述车载感知传感器在所述多个时刻的状态特征,得到所述车载感知传感器的时序状态特征向量;利用所述多层感知机,根据所述车载感知传感器的时序状态特征向量,得到所述故障车辆的故障预测结果。
6、根据本发明提供的一种无人驾驶车辆的感知传感器故障诊断方法,所述基于每一个所述车载设备超图中所述车载感知传感器对应超节点的第一融合特征向量,得到所述车载感知传感器在每一个时刻的状态特征,包括:针对每一个所述车载设备超图中所有所述车载感知传感器对应的超节点,作图卷积运算和图池化运算,得到每一个所述车载感知传感器在每一个所述车载设备超图中对应超节点的第二融合特征向量;将每一个所述车载感知传感器在每一个所述车载设备超图中对应超节点的第二融合特征向量,作为所述车载感知传感器在每一个时刻的状态特征。
7、根据本发明提供的一种无人驾驶车辆的感知传感器故障诊断方法,通过以下方式训练得到所述宽体车故障检测模型:根据历史故障车辆的多个车载设备的参数数据,得到训练数据集;所述训练数据集包括作为样本数据的参数数据以及作为标签的所述历史故障车辆的故障原因;利用所述训练数据集,对至少一个初始图注意力网络卷积层、初始多层感知机以及初始基于时序的神经网络进行训练,得到所述宽体车故障检测模型。
8、根据本发明提供的一种无人驾驶车辆的感知传感器故障诊断方法,所述根据历史故障车辆的多个车载设备的参数数据,得到训练数据集,包括:响应于检测到所述历史故障车辆发生故障,采集所述历史故障车辆的多个车载设备的参数数据,将其作为样本数据;确定所述历史故障宽体的故障原因,将所述故障原因作为对应样本数据的标签。
9、根据本发明提供的一种无人驾驶车辆的感知传感器故障诊断方法,所述多个车载设备包括:车载感知传感器、域控设备、网关设备以及组合导航设备;所述根据所述多个车载设备在所述多个时刻中每一个时刻的参数数据,分别构建所述每一个时刻的车载设备超图,得到多个车载设备超图,包括:根据所述车载感知传感器、所述域控设备、所述网关设备以及所述组合导航设备在所述每一个时刻的参数数据,将所述车载感知传感器、所述域控设备、所述网关设备以及所述组合导航设备之间的关联度作为边的值,构建所述每一个时刻的车载设备超图,得到多个车载设备超图。
10、本发明还提供一种无人驾驶车辆的感知传感器故障诊断装置,包括:
11、获取模块,用于获取故障车辆的多个车载设备在多个时刻的参数数据;其中,所述多个车载设备包括:车载感知传感器以及与所述车载感知传感器相关联的车载设备;构建模块,用于根据所述多个车载设备在所述多个时刻中每一个时刻的参数数据,分别构建所述每一个时刻的车载设备超图,得到多个车载设备超图;其中,所述车载设备超图包括多个超节点,每一个超节点包括一个子图,所述子图与所述多个车载设备中的一种车载设备对应,所述子图包括至少一个节点,所述节点的值为所述子图对应的车载设备的一种参数数据;预测模块,用于利用宽体车故障检测模型,处理所述多个车载设备超图,得到所述故障车辆的故障预测结果;其中,所述宽体车故障检测模型是基于历史故障车辆的多个车载设备的参数数据,对至少一个图注意力网络卷积层、基于时序的神经网络以及多层感知机进行训练得到的。
12、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述无人驾驶车辆的感知传感器故障诊断方法的步骤。
13、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述无人驾驶车辆的感知传感器故障诊断方法的步骤。
14、本发明提供的无人驾驶车辆的感知传感器故障诊断方法和装置,根据多个车载设备在多个时刻中每一个时刻的参数数据,分别构建每一个时刻的车载设备超图,得到多个车载设备超图,从而可以利用车载设备超图,对多个车载设备的参数数据的进行全面、细致的组织与表示。利用宽体车故障检测模型,处理多个车载设备超图,得到故障车辆的故障预测结果。由于该宽体车故障检测模型是基于历史故障车辆的多个车载设备的参数数据,通过训练至少一个图注意力网络卷积层、基于时序的神经网络以及多层感知机而得到的,因此它具备机器学习网络强大的数据处理和以及时序特征提取能力,可以从多个车载设备在多个时刻的参数数据中提取有效故障信息,从而可以准确、高效地实现无人驾驶车辆的车载感知传感器故障的诊断。
本文地址:https://www.jishuxx.com/zhuanli/20241118/331435.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。