码头自动化快速装卸控制系统的制作方法
- 国知局
- 2025-01-10 13:27:19
本发明是码头自动化快速装卸控制系统,属于运输。
背景技术:
1、在港口码头装卸金属板时,货车装载金属板至码头停泊的货船附近,操作员操作塔吊,利用抓手将金属板吊起,然后转运至货船内部,当金属板较长或者较重时,有时还需要增加另外的操作员在货车车厢内进行配合,将金属板捆绑至塔吊吊钩下,费时费力,塔吊还是单向运输,效率也不高,为此本领域技术人员提出了码头自动化快速装卸控制系统来解决上述背景技术中提出的问题。
技术实现思路
1、本发明要解决的技术问题是针对以上不足,提供码头自动化快速装卸控制系统,本发明设有滑臂,滑臂下方还设有搬运结构,滑臂包括上滑臂和下滑臂,上滑臂和下滑臂可以交替往复移动,利用搬运结构可以不经人工操作的情况下,自动在货车和货船之间来回搬运金属板,提高了金属板的装卸效率。
2、为解决以上技术问题,本发明采用以下技术方案:
3、码头自动化快速装卸控制系统,包括地轨,地轨两端还设有激光测距仪,地轨内设有凹槽,凹槽有平行两条,凹槽内设有滑桩,地轨一端上方还设有液压缸,液压缸末端和滑桩相连接,滑桩上方固接有装卸平台,装卸平台有两个且平行,装卸平台与地轨呈垂直放置,装卸平台上表面固接有固定块,固定块两侧开有凹槽,其中一装卸平台上表面还设有链条输送带,且该侧固定块位于链条输送带内部,固定块上方设有滑臂,滑臂包括上滑臂和下滑臂,滑臂下方还设有搬运结构。
4、进一步,上滑臂和下滑臂呈拱形,且上滑臂高度比下滑臂高度高,下滑臂下方两端位于固定块相对凹槽内,上滑臂下方两端位于固定块相背凹槽内。
5、进一步,链条输送带一侧和下滑臂之间固接有下连接块,链条输送带另一侧和上滑臂之间固接有上连接块。
6、进一步,搬运结构包括滑行轨道,滑行轨道由两条平行轨道构成,位于滑臂下表面,滑行轨道之间还设有转盘,转盘位于滑臂下表面,转盘表面固接有驱动板,驱动板两端设有驱动旋转轴。
7、进一步,所述驱动板两侧还设有载物板,载物板挂载于两滑行轨道之间,载物板中心表面还设有平移旋转轴,驱动旋转轴和平移旋转轴之间通过连杆相连接,载物板两侧还固接有视觉相机。
8、进一步,所述载物板两端还设有升降组件,升降组件包括螺旋凹槽和分合箱,两者之间连接有转接凹槽,螺旋凹槽有相对两个,螺旋凹槽内设有链条,链条表面分布有咬合块,咬合块末端为半圆形结构。
9、进一步,所述分合箱内设有升降齿轮和压合辊,升降齿轮和压合辊都有一组,呈相对分布,中间通过链条,并且其间链条表面的咬合块呈交错分布,升降齿轮齿牙伸入到链条内。
10、进一步,升降齿轮表面还设有第一锥形齿轮,第一锥形齿轮表面还设有第二锥形齿轮,两者通过齿牙相互啮合,第二锥形齿轮侧面还固接有升降电机,升降电机固定安装于分合箱内壁上。
11、进一步,升降组件下方设有电磁板,电磁板固接于两相对链条末端,电磁板表面还设有超声波传感器。
12、进一步,还包括中央控制器,中央控制器连接有输入部分和输出部分,中央控制器用于接收输入部分检测的数据,并且向输出部分发送运行的指令,实现本码头自动化快速装卸控制系统自动化运行,中央控制器还连接有操作屏,操作屏用于显示本码头自动化快速装卸控制系统的运行状态。
13、本发明采用以上技术方案,与现有技术相比,具有如下技术效果:
14、1、本发明在港口货车和货船之间上方设有滑臂,滑臂包括上滑臂和下滑臂,上滑臂和下滑臂通过链条输送带驱动往复运动,且互补干涉,在货车和货船之间实现装卸与吊装同步进行,提高了金属板在码头的装卸效率。
15、2、本发明滑臂下方设有升降组件,升降组件包括两条平行的链条,链条可以蜷缩与伸长,在不占用工作面积的同时,还可以自由的控制其伸长缩短的尺寸,链条下方固接有电磁板,电磁板可以快速吸附与释放金属板,在装卸与吊装时,节省了人力与时间。
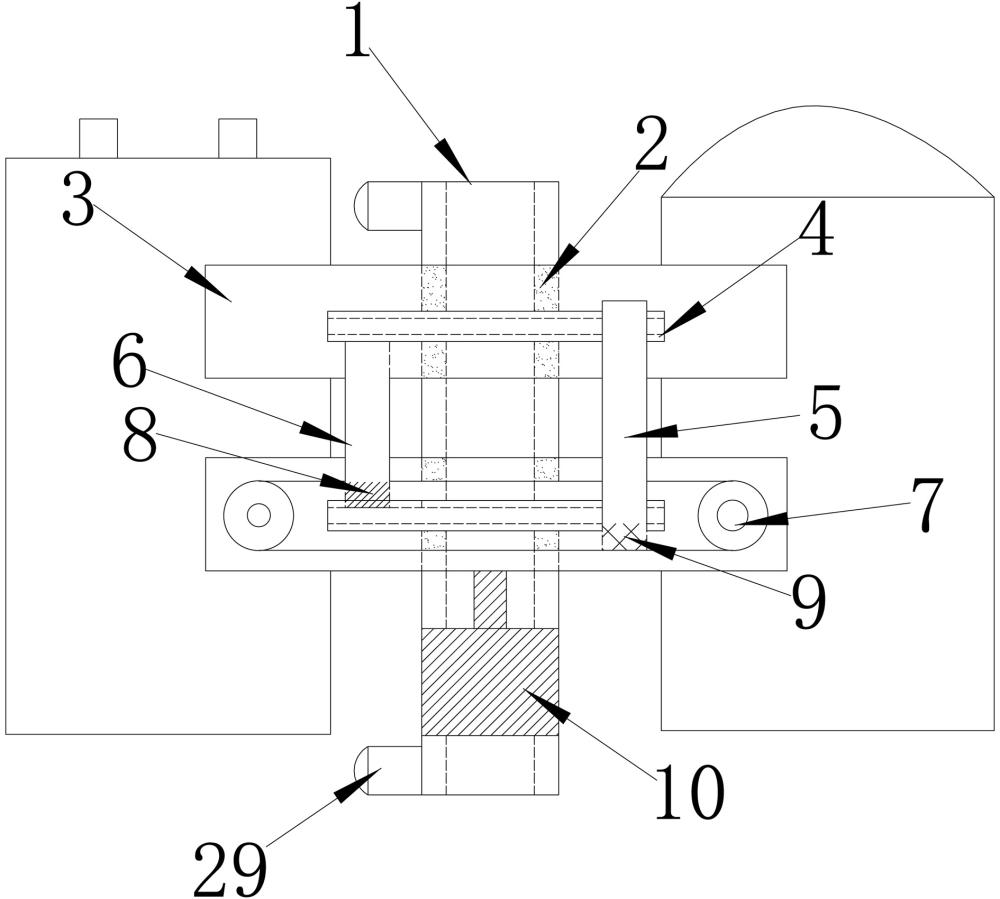
技术特征:1.码头自动化快速装卸控制系统,其特征在于:包括地轨(1),地轨(1)两端还设有激光测距仪(29),地轨(1)内设有凹槽,凹槽有平行两条,凹槽内设有滑桩(2),地轨(1)一端上方还设有液压缸(10),液压缸(10)末端和滑桩(2)相连接,滑桩(2)上方固接有装卸平台(3),装卸平台(3)有两个且平行,装卸平台(3)与地轨(1)呈垂直放置,装卸平台(3)上表面固接有固定块(4),固定块(4)两侧开有凹槽,其中一装卸平台(3)上表面还设有链条输送带(7),固定块(4)位于链条输送带(7)内部,固定块(4)上方设有滑臂,滑臂包括上滑臂(5)和下滑臂(6),滑臂下方还设有搬运结构(27)。
2.如权利要求1所述的码头自动化快速装卸控制系统,其特征在于:上滑臂(5)和下滑臂(6)呈拱形,且上滑臂(5)高度比下滑臂(6)高度高,下滑臂(6)下方两端位于固定块(4)相对凹槽内,上滑臂(5)下方两端位于固定块(4)相背凹槽内。
3.如权利要求1所述的码头自动化快速装卸控制系统,其特征在于:链条输送带(7)一侧和下滑臂(6)之间固接有下连接块(8),链条输送带(7)另一侧和上滑臂(5)之间固接有上连接块(9)。
4.如权利要求1所述的码头自动化快速装卸控制系统,其特征在于:搬运结构(27)包括滑行轨道(30),滑行轨道(30)由两条平行轨道构成,位于滑臂下表面,滑行轨道(30)之间还设有转盘(11),转盘(11)位于滑臂下表面,转盘(11)表面固接有驱动板(12),驱动板(12)两端设有驱动旋转轴(13)。
5.如权利要求4所述的码头自动化快速装卸控制系统,其特征在于:所述驱动板(12)两侧还设有载物板(14),载物板(14)挂载于两滑行轨道(30)之间,载物板(14)中心表面还设有平移旋转轴(17),驱动旋转轴(13)和平移旋转轴(17)之间通过连杆相连接,载物板(14)两侧还固接有视觉相机(31)。
6.如权利要求5所述的码头自动化快速装卸控制系统,其特征在于:所述载物板(14)两端还设有升降组件(15),升降组件(15)包括螺旋凹槽(18)和分合箱(32),两者之间连接有转接凹槽(21),螺旋凹槽(18)有相对两个,螺旋凹槽(18)内设有链条(19),链条(19)表面分布有咬合块(20),咬合块(20)末端为半圆形结构。
7.如权利要求6所述的码头自动化快速装卸控制系统,其特征在于:所述分合箱(32)内设有升降齿轮(23)和压合辊(26),升降齿轮(23)和压合辊(26)都有一组,呈相对分布,中间通过链条(19),并且其间链条(19)表面的咬合块(20)呈交错分布,升降齿轮(23)齿牙伸入到链条(19)内。
8.如权利要求7所述的码头自动化快速装卸控制系统,其特征在于:升降齿轮(23)表面还设有第一锥形齿轮(24),第一锥形齿轮(24)表面还设有第二锥形齿轮(25),两者通过齿牙相互啮合,第二锥形齿轮(25)侧面还固接有升降电机(22),升降电机(22)固定安装于分合箱(32)内壁上。
9.如权利要求6所述的码头自动化快速装卸控制系统,其特征在于:升降组件(15)下方设有电磁板(16),电磁板(16)固接于两相对链条(19)末端,电磁板(16)表面还设有超声波传感器(28)。
10.如权利要求1所述的码头自动化快速装卸控制系统,其特征在于:还包括中央控制器,中央控制器连接有输入部分和输出部分,中央控制器用于接收输入部分检测的数据,并且向输出部分发送运行的指令,实现本码头自动化快速装卸控制系统自动化运行,中央控制器还连接有操作屏,操作屏用于显示本码头自动化快速装卸控制系统的运行状态。
技术总结本申请公开了码头自动化快速装卸控制系统,属于运输的技术领域,本申请在港口货车和货船之间上方设有滑臂,滑臂包括上滑臂和下滑臂,上滑臂和下滑臂在货车和货船之间往复交替运送金属板,滑臂下方设有升降组件,升降组件包括链条,在不占用工作面积的同时,还可以自由控制其伸长缩短的尺寸,链条下方固接有电磁板,电磁板可以快速吸附与释放金属板,使金属板在码头装卸与吊装时,既节省了人力与时间,又提高了装卸效率。技术研发人员:杨贵声,王玉福,艾常师,王志强,宿鹏,李正华,王中峰,刘强,王虎,王青,许佳锐,张小龙,张帆,葛秀军受保护的技术使用者:山东港口科技集团潍坊有限公司技术研发日:技术公布日:2025/1/6本文地址:https://www.jishuxx.com/zhuanli/20250110/353184.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表