巡检机器人机械臂
- 国知局
- 2024-07-08 11:04:11
本技术涉及机械臂,具体来说涉及一种巡检机器人机械臂。
背景技术:
1、农业巡检技术在不断发展,涵盖了多种方法和工具,传统的农业巡检方法是人工巡视,随着人工智能技术的发展,无人机、智能农机、巡检机器人在农业巡检中的应用也越来越广泛。机械臂在巡检机器人的巡检过程中具有重要性,为机器人巡检提供了多方面的支持和增强,还能够帮助机器人更好地适应环境、收集数据、执行任务和提高自主性,从而提高巡检效率和精确性,为农业生态牧场等农业领域的巡检工作提供有力支持。
2、目前市面上的机械臂结构采用多种不同的技术,常见的机械臂结构技术有串联式机械臂、并联式机械臂,串联式机械臂具有精度低、有效载荷重量比低、高惯性等缺点,它的低精度源于鸡肋的关节误差和链接中的挠度,低有效载荷重量比源于每个执行器都需要支撑后继链接的重量,高惯量是由于大量的运动部件串联起来,从而形成高惯量的长梁。并联结构克服了串联结构的缺点,但是也有很明显的缺点,例如:工作空间有限,灵巧性低,直接运动学解决方案复杂等等。
技术实现思路
1、本实用新型的目的是提供一种巡检机器人机械臂,用于解决上述问题。
2、为了实现上述目的,本实用新型提供如下技术方案:
3、一种巡检机器人机械臂,包括:
4、通过圆周阵列布置的连杆件装配于后盖上的开合固定后座;
5、通过圆周阵列布置的转换器装配于装载台上的喂料枪以及清洁刷,且装载台装配于后盖上;
6、安装于所述装载台一端,且输出端安装有机械爪的伸缩杆。
7、作为优选的,所述后盖上设置有旋转电机,而装载台则安装于所述旋转电机的输出端。
8、作为优选的,还包括装配于所述转换器上,且靠近端部的侧壁被开合固定后座卡固的外壳。
9、作为优选的,所述连杆件包括第一连杆和第二连杆,所述第一连杆和第二连杆的一端分别铰接于所述后盖侧壁开设的缺槽内,所述第二连杆的另一端铰接于所述开合固定后座的端部,而第一连杆的另一端铰接于所述开合固定后座靠近端部的侧壁上。
10、作为优选的,所述第一连杆的长度为第二连杆长度的二倍。
11、作为优选的,所述第二连杆为长框结构,且长框结构的框槽内设置有拉簧;
12、拉簧默认状态下,所述开合固定后座与所述后盖距离最近。
13、作为优选的,所述清洁刷为长筒状。
14、作为优选的,所述转换器包括第三连杆、第四连杆以及第五连杆,所述第四连杆的一端与所述第三连杆的一端相铰接,另一端与所述第五连杆相铰接;
15、所述第三连杆和所述第五连杆则分别铰接于所述装载台;
16、所述喂料枪/清洁刷则安装于所述第四连杆的端部,并靠近所述第五连杆分布。
17、在上述技术方案中,本实用新型提供的一种巡检机器人机械臂,具备以下有益效果:实用性更强,更换模块时,不需要拆开机械臂,只需转动转换器就可以实现对应模块的转换,使得机械臂功能的更换变得简单方便,杆件设计使得机械臂的负载能力提高,从而提高机械臂的生产效率,同时也节省了机械臂后期维护的成本。
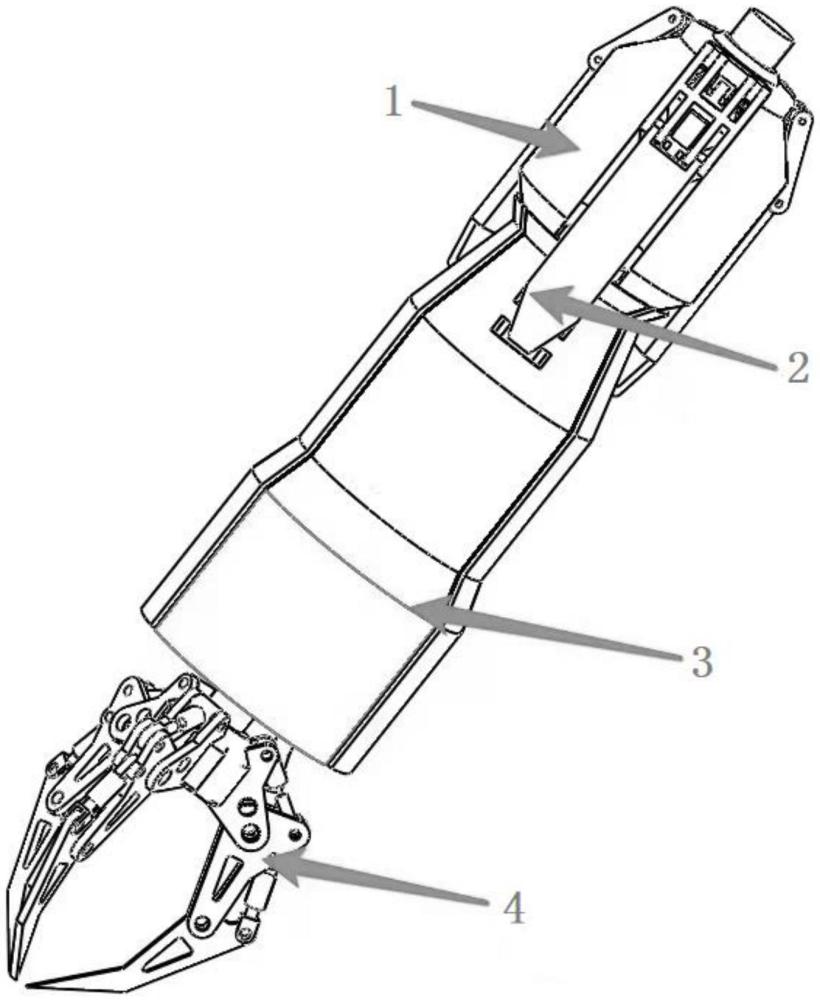
技术特征:1.一种巡检机器人机械臂,其特征在于,包括:
2.根据权利要求1所述的巡检机器人机械臂,其特征在于,所述后盖(1)上设置有旋转电机,而装载台(8)则安装于所述旋转电机的输出端。
3.根据权利要求1所述的一种巡检机器人机械臂,其特征在于,还包括装配于所述转换器(10)上,且靠近端部的侧壁被开合固定后座(2)卡固的外壳(3)。
4.根据权利要求1所述的巡检机器人机械臂,其特征在于,所述连杆件包括第一连杆(12)和第二连杆(13),所述第一连杆(12)和第二连杆(13)的一端分别铰接于所述后盖(1)侧壁开设的缺槽内,所述第二连杆(13)的另一端铰接于所述开合固定后座(2)的端部,而第一连杆(12)的另一端铰接于所述开合固定后座(2)靠近端部的侧壁上。
5.根据权利要求4所述的巡检机器人机械臂,其特征在于,所述第一连杆(12)的长度为第二连杆(13)长度的二倍。
6.根据权利要求4所述的巡检机器人机械臂,其特征在于,所述第二连杆(13)为长框结构,且长框结构的框槽内设置有拉簧;
7.根据权利要求1所述的巡检机器人机械臂,其特征在于,所述清洁刷(9)为长筒状。
8.根据权利要求1所述的巡检机器人机械臂,其特征在于,所述转换器(10)包括第三连杆、第四连杆以及第五连杆,所述第四连杆的一端与所述第三连杆的一端相铰接,另一端与所述第五连杆相铰接;
技术总结本技术公开了一种巡检机器人机械臂,包括:通过圆周阵列布置的连杆件装配于后盖上的开合固定后座;通过圆周阵列布置的转换器装配于装载台上的喂料枪以及清洁刷,且装载台装配于后盖上;安装于所述装载台一端,且输出端安装有机械爪的伸缩杆。该技术提供的巡检机器人机械臂,实用性更强,更换模块时,不需要拆开机械臂,只需转动转换器就可以实现对应模块的转换。技术研发人员:高金喆,寇志伟,史宏博,郑钧诚,孔哲,景高乐,杨尚茜,高鹏,段轲赫,许寒琪受保护的技术使用者:内蒙古工业大学技术研发日:20230922技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240617/51837.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。