高速磁浮异物侵入轨道控车整体方法与流程
- 国知局
- 2024-08-01 08:34:52
本发明属于高速磁浮灾害防护及运行控制,尤其涉及高速磁浮异物侵入轨道控车整体方法。
背景技术:
1、目前运营的上海高速磁浮示范线只有20多公里,基本在市区内;青岛四方试验线线路更短,作为示范线、试验线仅完成基本运营功能,没有异物侵入轨道情况发生,目前试验系统也没有这方面的考虑。
2、目前铁路尤其是高铁在应对异物侵限有成熟的处理方案,但是高速铁路轮轨与高速磁悬浮在运行速度、运行方式、抗灾害的能力方面存在着本质区别,主要区别如下:
3、速度差异:高铁运营速度最高350公里,高速磁浮时速600公里以上,这样的高速产生的动能更易受外界影响;
4、支撑方式差异:铁路通过轮轨支撑,车底距离轨面1米左右,小的侵入线路物体对高铁运行影响有限;而磁浮列车由于是通过磁力实现悬浮及导向,列车悬浮离开轨面间隙较小,以长导高速磁浮为例,其悬浮高度及导向间隙均为10mm左右,大于10mm的物体就会影响列车的悬浮,稍大的物体在时速600公里情况下对运输的影响更是致命的;高速磁浮长大干线铁路,最典型以京沪高速磁浮为例,南北两地必然要经过山川河谷;复杂的地质地貌滑坡、落石侵入线路与纵横交错的公路交叉、公路落物,这些都是长大干线高速磁浮运控系统必然要面临及应对处理的问题。
技术实现思路
1、本发明梳理、明确长大干线高速磁浮异物侵入轨道情况下,高速磁浮运控系统具体停车应对措施:包括调度员针对故障处理调度指挥工作、高速磁浮列车对现场故障排查的监控、现场异物清除后磁浮列车重启故障后运行模式、磁浮列车在故障重启后进入最近临时停车点停车进行车载电池充电,最后进入正常控车模式的全过程闭环方案。
2、本发明解决其技术问题是采取以下技术方案实现的:
3、高速磁浮异物侵入轨道控车整体方法,其特征在于,包括如下步骤:
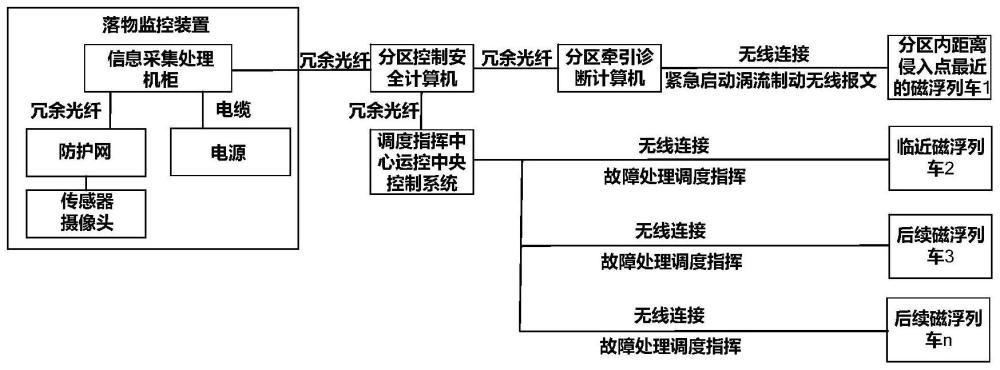
4、建立异物入侵监测系统,所述检测系统包括在磁浮线路待监控路段装设落物监控装置,以及,在磁浮列车前端安装传感器及信息处理计算机,信息处理计算机持续对传感器信息进行分析处理;
5、异物入侵监测系统监测到异物入侵后,分区内的进路控制计算机将发生异物侵限报警信息上传调度指挥中心运控中央控制系统,使得行车调度员得到报警信息,行车调度员针对异物入侵情况进行现场异物清理、调度;
6、现场异物清除后,磁浮列车在经过行车调度员允许后,进行磁浮列车故障后重启运行模式;
7、牵引分区按照行车调度命令,牵引分区安全控制计算机计算制动曲线保证电池失能的磁浮列车能够准确停靠临时停车点供电轨处,进行电池储能充电,充电完毕后,将按照调整后的运行图恢复正常运行。
8、进一步的,在磁浮线路待监控路段装设落物监控装置,落物监控装置监控异物是否击穿防护网进入磁浮线路,并将相关信息传递给临近牵引控制分区内的控制安全计算机设备,控制安全计算机设备与分区牵引诊断计算机通信,根据异物是否击穿防护网进入磁浮线路信息控制磁浮列车的制动与否。
9、进一步的,现场异物清除后,磁浮列车在经过行车调度员允许后,进行磁浮列车故障后重启运行模式的方法为:
10、车载安全计算机启动“异物侵限故障后重启”模式;
11、并在车载显示器上显示“故障后重启按钮”,司机按压该按钮;
12、磁浮列车按照规定的低速运行,并每50米1次的频率持续语音提醒司机注意观察前方情况,直至驶离异物侵限区域;
13、向行车调度员汇报信息持续正常,按照行车调度员后续命令执行操作,在得到新命令后,再次按压按钮解除故障后重启运行模式,转入运控车载设备控车模式。
14、进一步的,控制安全计算机以异物侵限地点200米处为危险点计算制动曲线,与分区牵引诊断计算机通信,命令牵引供电系统紧急制动,增加向高速运行的分区内距离侵入点最近的磁浮列车发送紧急启动涡流制动无线报文命令,实现磁浮列车紧急涡流制动、地面牵引供电利用最大反磁场作用力的双制动力施加,使磁浮列车实现制动停车。
15、进一步的,在磁浮列车前端安装传感器及信息处理计算机,信息处理计算机持续对传感器信息进行分析处理时,一旦发生异物侵限,运控系统通过涡流制动及牵引供电系统提供的反磁场作用力进行紧急制动保证安全,在低速和停车后司机可通过传感器上传的信息,对现场进行监控,并与行车调度员保持电话沟通。
16、进一步的,行车调度员针对异物入侵情况进行现场异物清理、调度的方法为:
17、下发调度命令通知后续、临近列车紧急停车;
18、立即启动现场故障清除工作、启动紧急救援预案操作,并与临近侵限异物的磁浮列车司机紧急通话核实情况;
19、启动现场视频监控信号,持续观察、指挥后续现场工作进程;
20、待现场人员反馈清理完毕及视频确认,并经与磁浮列车司机再次通话后,发调度命令指挥磁浮列车低速前行通过;
21、给发生异物侵限控制的牵引分区下发磁浮列车在临近停车点停车进行电池电力储能操作调度命令,牵引分区安全控制计算机计算控车曲线保证该命令执行;
22、行车调度员持续关注磁浮列车低速运行至临近临时停车点给电池电力储能,现场完成操作后,与司机电话沟通,行调员按照调整后的运行图给对应的牵引分区下调度命令,保证高速磁浮列车整体重新正常运行。
23、本发明的优点和积极效果是:
24、(1)、本发明首次明确了高速磁浮列车运行控制在异物侵限灾害情况下,异物侵限监控系统、运控系统、调度指挥系统等全过程闭环操作技术方案;并首次提出了在长大干线高速磁浮运控系统无线报文中新增“异物侵限紧急启动涡流制动”无线报文的方案,保证磁浮列车在异物侵限情况下紧急制动;
25、(2)、本发明首次明确了调度员针对异物侵限故障处理调度指挥工作的全过程方案;并首次提出了在高速磁浮列车增加视觉、雷达及信息处理计算机方案,保证了司机对现场故障排查的实时监控及后续驶离异物侵限区域操作;
26、(3)本发明首次提出了高速磁浮列车在侵限异物清除后磁浮列车故障后重启运行模式,实现司机、视觉雷达、提醒功能保证磁浮列车顺利驶离异物侵限区域;首次明确了故障后重启的高速磁浮列车车载电池充电的控制方案。
技术特征:1.高速磁浮异物侵入轨道控车整体方法,其特征在于,包括如下步骤:
2.根据权利要求1所述高速磁浮异物侵入轨道控车整体方法,其特征在于:在磁浮线路待监控路段装设落物监控装置,落物监控装置监控异物是否击穿防护网进入磁浮线路,并将相关信息传递给临近牵引控制分区内的控制安全计算机设备,控制安全计算机设备与分区牵引诊断计算机通信,根据异物是否击穿防护网进入磁浮线路信息控制磁浮列车的制动与否。
3.根据权利要求1所述高速磁浮异物侵入轨道控车整体方法,其特征在于,现场异物清除后,磁浮列车在经过行车调度员允许后,进行磁浮列车故障后重启运行模式的方法为:
4.根据权利要求2所述高速磁浮异物侵入轨道控车整体方法,其特征在于:控制安全计算机以异物侵限地点200米处为危险点计算制动曲线,与分区牵引诊断计算机通信,命令牵引供电系统紧急制动,增加向高速运行的分区内距离侵入点最近的磁浮列车发送紧急启动涡流制动无线报文命令,实现磁浮列车紧急涡流制动、地面牵引供电利用最大反磁场作用力的双制动力施加,使磁浮列车实现制动停车。
5.根据权利要求1所述高速磁浮异物侵入轨道控车整体方法,其特征在于:在磁浮列车前端安装传感器及信息处理计算机,信息处理计算机持续对传感器信息进行分析处理时,一旦发生异物侵限,运控系统通过涡流制动及牵引供电系统提供的反磁场作用力进行紧急制动保证安全,在低速和停车后司机可通过传感器上传的信息,对现场进行监控,并与行车调度员保持电话沟通。
6.根据权利要求1所述高速磁浮异物侵入轨道控车整体方法,其特征在于,行车调度员针对异物入侵情况进行现场异物清理、调度的方法为:
技术总结本发明涉及高速磁浮异物侵入轨道控车整体方法,包括如下步骤:建立异物入侵监测系统;监测到异物入侵后,分区内的进路控制计算机将发生异物侵限报警信息上传调度指挥中心运控中央控制系统,使得行车调度员得到报警信息,行车调度员针对异物入侵情况进行现场异物清理、调度;现场异物清除后,磁浮列车在经过行车调度员允许后,进行磁浮列车故障后重启运行模式;牵引分区按照行车调度命令,牵引分区安全控制计算机计算制动曲线保证电池失能的磁浮列车能够准确停靠临时停车点供电轨处,进行电池储能充电,充电完毕后,将恢复正常运行;本发明给出了长大干线高速磁浮异物侵入轨道情况下,高速磁浮运控系统具体停车应对全过程闭环方案。技术研发人员:何永发,刘金瑞,王海忠,孙屹枫,陈瑞朝,张昱,南迪,郎小亮,张兆中受保护的技术使用者:中国铁路设计集团有限公司技术研发日:技术公布日:2024/2/8本文地址:https://www.jishuxx.com/zhuanli/20240718/232401.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。