列车自主感知定位方法及系统
- 国知局
- 2024-08-01 08:40:40
本发明涉及列车自主感知定位,具体涉及一种列车自主感知定位方法及系统。
背景技术:
1、列车自主感知定位是指列车通过搭载车载传感器和相应算法,在无需依赖基础设施的情况下,实现对其位置的自主感知和定位。传统的列车定位方法通常依赖于基础设施,例如全球卫星导航系统(gnss)和地面信标,然而,这些方法在某些情况下存在准确性和可靠性方面的限制,例如在隧道等无gps信号的环境中。因此,开发能够在各种复杂环境下实现精准定位的列车自主感知定位技术具有重要意义。
2、随着机器视觉、深度学习和传感器技术的快速发展,列车自主感知定位的研究取得了显著进展。视觉传感器因其高精度、低成本以及丰富的数据信息而成为列车自主感知定位的有力选择。通过利用视觉传感器,列车可以通过图像处理和计算机视觉技术对周围环境进行感知,从而实时获取环境信息和位置信息。
3、在列车自主感知定位的研究中,关键挑战之一是如何准确地提取和匹配环境中的特征。这包括通过图像处理技术提取轨道标志、隧道入口等环境特征,并通过特征匹配算法进行定位。同时,由于列车运行环境的复杂性,例如光照变化、天气变化和障碍物等,导致图像质量下降,进而影响定位的准确性,如何稳健地处理这些干扰因素也是一个重要的研究方向。其次,图像处理和计算机视觉算法的复杂性要求高计算能力,因此需要在列车上配备高性能的计算设备,增加了系统的成本和复杂度。此外,由于列车运行速度较快,对实时性要求较高,视觉定位系统需要实时快速地处理图像信息,确保定位的及时性和稳定性。
4、现有传统的列车定位方法通常依赖于基础设施,这些方法的定位覆盖范围有限,无法适用于复杂的铁路场景,还可能无法提供足够的实时性。现有列车视觉里程计中图像特征匹配方法的不足:列车运行环境的复杂性,例如光照变化、天气变化和障碍物等,导致图像质量下降,难以提取关键特征;图像特征匹配方法需要大量的计算资源,这可能在嵌入式系统或实时应用中限制其使用。
技术实现思路
1、本发明的目的在于提供一种列车自主感知定位方法及系统,以解决上述背景技术中存在的至少一项技术问题。
2、为了实现上述目的,本发明采取了如下技术方案:
3、一方面,本发明提供一种列车自主感知定位方法,包括:
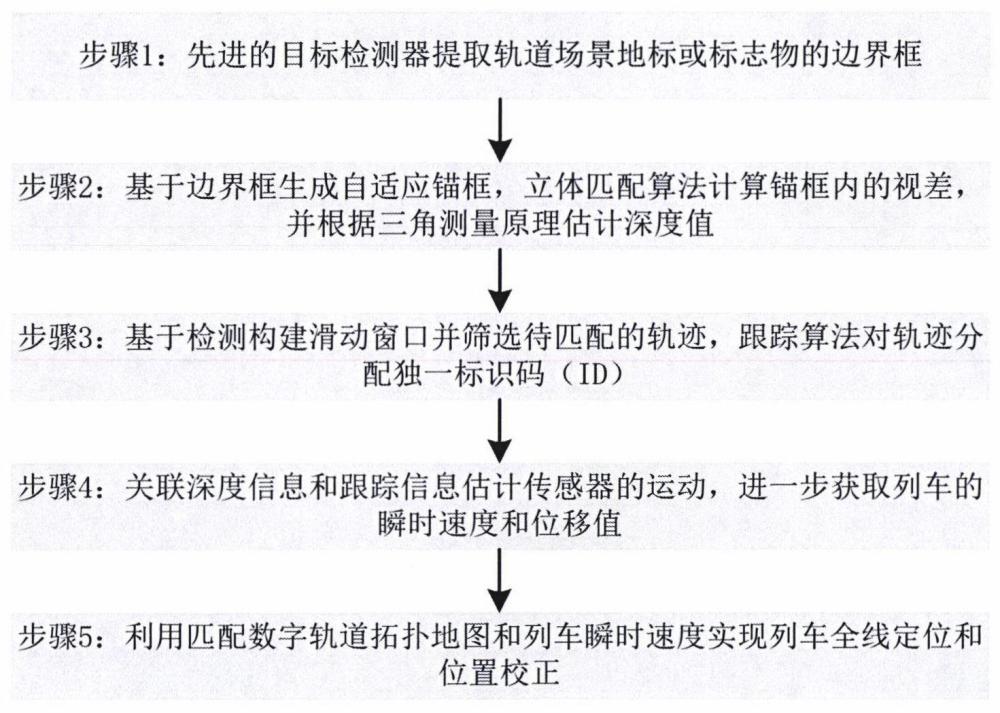
4、采用目标检测算法识别轨道场景中的地标或标志物,提取立体图像对中目标的位置边界框;
5、关联立体图像对中同一目标的边界框生成最小包围的自适应锚框,根据立体匹配算法计算锚框内的像素偏移视差,根据三角测量原理由视差计算深度值;
6、基于检测的跟踪范式,利用滑动窗口筛选待匹配的轨迹,根据跟踪算法对包含相同目标的轨迹分配相同的独一标识码;
7、关联深度值和独一标识码,计算地标深度差,估计传感器在两帧时间内的运动,根据相机的采集帧率估计列车的瞬时速度,并通过时间积分计算得到列车的位移值;
8、对列车的位移值匹配数字轨道拓扑地图,获得列车在全线的位置,结合列车瞬时速度判断线路关键位置,对列车的位置进行校正。
9、进一步的,关联立体图像对中同一目标的边界框生成最小包围的自适应锚框,立体匹配算法计算锚框内的像素偏移视差,根据三角测量原理由视差进一步估计深度值,包括以下步骤:
10、步骤s21:自适应锚框提取:为了限制立体匹配的搜索空间,关联立体图像对中同一目标的边界框生成最小包围的自适应锚框;通过水平极线约束,在右侧图像中搜索与左侧图像中的边界框对齐同一水平线的边界框,计算同一图像坐标下左右边界框的最小包围框作为锚框;
11、步骤s22:计算视差:采用半全局立体匹配算法计算锚框中映射点的像素偏移量获得视差;首先利用census变换计算匹配成本,采用8路径半全局匹配方法进行代价聚合,沿特定方向的进行代价计算,然后通过″赢者通吃″方法确定匹配误差最小的视差值,最后通过视差优化得到最终的视差图,采用锚框内的百分位视差进行空洞插值
12、步骤s23:深度估计:基于三角测量原理,由视差图进一步得到目标的深度值。
13、进一步的,所述的基于检测的跟踪范式,利用滑动窗口筛选待匹配的轨迹,跟踪算法对包含相同目标的轨迹分配相同的独一标识码,包括以下步骤:
14、步骤s31:通过滑动窗口筛选待匹配轨迹:滑动窗口是由当前帧中所有目标边界框的位置信息构建的包围域,用于限制跟踪算法的搜索空间,任何不在搜索空间中的历史轨迹都不再符合与当前检测关联的条件,通过滑动窗口法对所有历史轨迹进行初步筛选;
15、步骤s32:相似度计算:利用动量方向一致性和距离交叉联合计算检测与轨迹之间的相似度矩阵,表明它们之间的关联程度;
16、步骤s33:轨迹关联:匈牙利匹配算法利用步骤s32中的相似度矩阵生成匹配策略,并利用目标在三维空间中的位置拓扑先验来修正匈牙利匹配结果。
17、进一步的,关联深度值和独一标识码,计算地标的深度差,由此估计传感器在两帧时间内的运动,根据相机的采集帧率估计列车的瞬时速度,并通过时间积分计算得到列车的位移值,包括以下步骤:
18、步骤s41:传感器运动估计:运动信息表示为:m1,m2,..,mn,其中n是滑窗范围内检测目标的数量,f为视频当前帧序,bbox为边界框信息,z为深度信息,具体表示如下式:
19、步骤s42:列车瞬时速度估计:由步骤s41中的id信息关联目标的运动信息,得到同一目标在视频序列中深度变化,并根据相机的采集帧率估计列车的瞬时速度,计算如下式:
20、
21、
22、式中,指同id的轨迹在δf内的深度变化值,除以δf得到当前f帧定位标尺i单位深度变化量median[.]取中位数,vf第f帧的列车瞬时速度。
23、步骤s43:列车位移估计:基于列车的瞬时速度对时间求积分得到列车的位移:
24、
25、其中,pf是当前帧的位置,pf-1是前一帧的列车位置。
26、第二方面,本发明提供一种列车自主感知定位系统,包括:
27、提取模块,用于采用目标检测算法识别轨道场景中的地标或标志物,提取立体图像对中目标的位置边界框;
28、第一计算模块,用于关联立体图像对中同一目标的边界框生成最小包围的自适应锚框,根据立体匹配算法计算锚框内的像素偏移视差,根据三角测量原理由视差计算深度值;
29、分配模块,用于基于检测的跟踪范式,利用滑动窗口筛选待匹配的轨迹,根据跟踪算法对包含相同目标的轨迹分配相同的独一标识码;
30、第二计算模块,用于关联深度值和独一标识码,计算地标深度差,估计传感器在两帧时间内的运动,根据相机的采集帧率估计列车的瞬时速度,并通过时间积分计算得到列车的位移值;
31、校正模块,用于对列车的位移值匹配数字轨道拓扑地图,获得列车在全线的位置,结合列车瞬时速度判断线路关键位置,对列车的位置进行校正。
32、第三方面,本发明提供一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质用于存储计算机指令,所述计算机指令被处理器执行时,实现如上所述的列车自主感知定位方法。
33、第四方面,本发明提供一种计算机设备,包括存储器和处理器,所述处理器和所述存储器相互通信,所述存储器存储有可被所述处理器执行的程序指令,所述处理器调用所述程序指令执行如上所述的列车自主感知定位方法。
34、第五方面,本发明提供一种电子设备,包括:处理器、存储器以及计算机程序;其中,处理器与存储器连接,计算机程序被存储在存储器中,当电子设备运行时,所述处理器执行所述存储器存储的计算机程序,以使电子设备执行实现如上所述的列车自主感知定位方法的指令。
35、本发明有益效果:轨道列车自主定位减少对地面设备的依赖,提高了系统的灵活性和可靠性,可以应对地面设备故障或覆盖不足的情况,并为列车的自主运行和导航提供了技术支持。
36、本发明附加方面的优点,将在下述的描述部分中更加明显的给出,或通过本发明的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20240718/232801.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。