基于BLS过估定位更新的人工车到站方法、设备及介质与流程
- 国知局
- 2024-08-01 08:43:21
本发明涉及列车信号控制系统,尤其是涉及一种基于bls过估定位更新的人工车到站方法、设备及介质。
背景技术:
1、列车自主运行系统(tacs)是指列车基于运行计划和实时位置实现自主资源管理并进行主动间隔防护的信号系统。轨旁列车控制子系统(wtc)是tacs系统列车控制的后备子系统,当车载控制子系统(cc)故障失效或者切除时,列车将转换为wtc控车模式,wtc将保障列车在人工驾驶模式上的安全运行。在wtc控车模式下,wtc会接收来自ats下发的任务,人工驾驶列车根据任务移动列车,在任务执行期间,及时准确的判断列车是否到站关乎线路资源的占用与释放,直接影响着wtc控车模式下的运行效率。
2、目前wtc控车模式判断列车到站方法为,在接收到ats发送任务后,统一按照任务下发后间隔240s丢掉正在执行的任务,任务丢掉后,即判定列车到站。此种方式不考虑站间距离,不考虑列车行驶速度,对列车到站的判断会出现较大的误差,会极大降低wtc控车模式下的运行效率,这样的设计存在不科学性,不符合tacs系统的高效灵活的特点。
3、经过检索中国专利公开号cn104554350a公开了一种列车定位过程中的信标检测方法,具体公开了包括步骤:设置信标窗口状态机,状态机初始处于第一状态;列车运行后经过第一个信标窗口时,状态机切换状态,列车天线读取第一个信标并建立列车位置,列车离开第一个信标窗口后状态机切换状态;列车运行过程中持续更新位置,搜索并确定天线是否位于某个信标窗口内;在某个窗口内时状态机切换到第二状态并将信标标记为期望信标;在窗口内如果检测到期望信标,通过期望信标对列车的位置进行更新;列车离开期望信标的窗口后,切换到第一状态并继续后续其它信标检测。但是该现有专利并未涉及如何来实现在不同站间距和不同车速的人工车准确的到站。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于bls过估定位更新的人工车到站方法、设备及介质。
2、本发明的目的可以通过以下技术方案来实现:
3、根据本发明的第一方面,提供了一种基于bls过估定位更新的人工车到站方法,该方法通过bls天线采集到的信标信息计算出保证列车安全的车端过估位置信息,并通过过估的车头位置到达任务终点位置后,延迟设定时间再判断列车到站,其中bls为列车后备定位系统。
4、作为优选的技术方案,所述方法具体包括以下步骤:
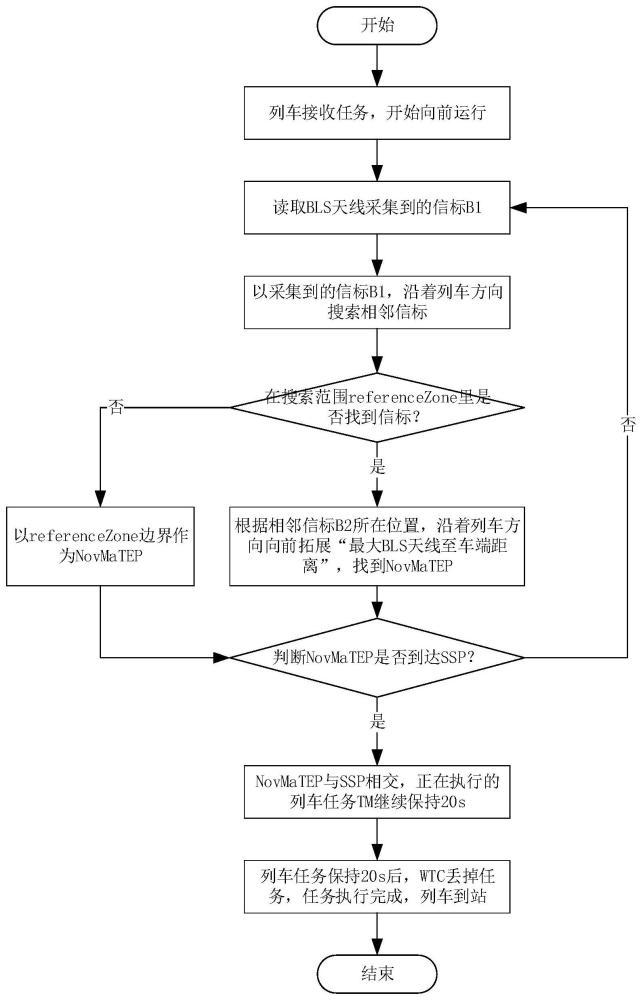
5、步骤s1,wtc控车模式下的人工驾驶列车接收来自ats下发的运行任务,列车根据任务方向开始运行,其中wtc为轨旁列车控制子系统;
6、步骤s2,布置在列车中部的bls天线实时采集下方线路上的信标,并将采集到的信标命名为b1;
7、步骤s3,根据采集到的信标b1,获得b1信标坐标位置,通过任务执行路径和列车最坏情况可达位置路径交集获得搜索范围referencezone,并以列车运行方向为搜索方向,向前搜索下一个信标,若找到相邻信标b2,执行步骤s4;否则以referencezone边界作为过估后的车端位置novmatep,并执行步骤s5;
8、步骤s4,根据相邻信标b2获得坐标位置,沿着列车运行方向向前搜索,如果搜索长度达到“最大bls天线至车端距离”,则以相邻信标前方“最大bls天线至车端距离”位置作为novmatep,并执行步骤s5;如果提前搜索到referencezone边界,则以边界位置为novmatep,并执行步骤s5;
9、步骤s5,判断novmatep的位置是否已到达任务的ssp,如果已到达,执行步骤s7,如果没有,则返回步骤s2;
10、步骤s6,继续保持正在执行的列车任务一段时间;
11、步骤s7,任务保持设定时间后,wtc丢掉当前正在执行的任务,任务执行完成,列车到站。
12、作为优选的技术方案,所述步骤s1中ats下发的运行任务中包括列车从始发站到终点站的运行范围,并在任务中定义了任务终点位置ssp,该位置为列车在站台停车的车头对标位置。
13、作为优选的技术方案,所述步骤s2中bls天线通过采集到的信标信息,向wtc提供相应的列车id信息和列车位置信息。
14、作为优选的技术方案,所述bls布置在列车上,配合wtc完成列车的运行。
15、作为优选的技术方案,所述步骤s3中的任务执行路径为ats下发的任务中,列车所需要移动的路径。
16、作为优选的技术方案,所述步骤s3中的列车最坏情况可达位置路径为列车实时根据列车速度和质量状态计算的可达路径。
17、作为优选的技术方案,所述步骤s3中过估后的车端位置novmatepp,用于保证车头在最坏情况下不会超过该位置。
18、作为优选的技术方案,所述步骤s3具体实施过程如下:
19、步骤s3.1,通过任务执行路径和列车最坏情况可达位置路径交集获得搜索范围referencezone;
20、步骤s3.2,获得全线所有信标位置作为搜索停止条件;
21、步骤s3.3,以bls天线采集到的信标b1所在位置为搜索起点,以列车运行方向为搜索方向,开始向前方搜索;
22、步骤s3.4,判断是否搜索到信标的位置坐标,如果搜索到,搜索结束,找到在该位置的相邻信标b2,执行步骤s4;如果搜索到referencezone边界,则搜索结束,referencezone边界作为novmatep,执行步骤s5。
23、作为优选的技术方案,所述步骤s4中最大bls天线至车端距离为部署在列车中部的bls天线离车两端的最大距离。
24、作为优选的技术方案,所述步骤s4具体实施过程如下:
25、步骤s4.1,通过任务执行路径和列车最坏情况可达位置路径交集获得搜索范围referencezone;
26、步骤s4.2,以搜索长度“最大bls天线至车端距离”作为搜索停止条件;
27、步骤s4.3,以相邻信标b2位置为搜索起点,以列车运行方向为搜索方向,开始向前搜索;
28、步骤s4.4,判断搜索长度是否达到“最大bls天线至车端距离”,如果达到,则搜索结束,以相邻信标前方“最大bls天线至车端距离”位置作为novmatep,执行步骤s5;如果没有达到,则以边界位置为novmatep,搜索结束,执行步骤s5。
29、作为优选的技术方案,所述步骤s6中设定一个延迟时间,用于继续保持任务。
30、作为优选的技术方案,所述延迟时间根据信标布置情况、列车长度和列车速度来定,保证使列车能够到达ssp。
31、作为优选的技术方案,所述延迟时间为20s。
32、根据本发明的第二方面,提供了一种电子设备,包括存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现所述的方法。
33、根据本发明的第三方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现所述的方法。
34、与现有技术相比,本发明具有以下优点:
35、1)本发明设计了一种过估定位方法,通过bls天线采集到的信标,计算出保证列车安全的车端过估位置信息,能够根据信标位置精确获得列车车端位置;
36、2)本发明通过列车bls天线采集到的信标,实时计算出车端过估位置信息,通过过估的车头位置到达任务终点位置后20s判断列车到站,此种方法相较原方案保持240s,能够实现在不同站间距和不同车速的人工车准确的到站,提高任务执行效率;
37、3)本发明通过准确的判断列车到站,能够及时的释放线路资源,提高wtc控车模式下的运行效率。
本文地址:https://www.jishuxx.com/zhuanli/20240718/232977.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。