轨道交通列车远程驾驶系统及其切换方法、设备及介质与流程
- 国知局
- 2024-08-01 09:04:45
本发明涉及轨道交通信号系统,尤其是涉及一种轨道交通列车远程驾驶系统及其切换方法、设备及介质。
背景技术:
1、在目前国内城市轨道交通线路正常运行过程中,当信号系统由于系统限制或发生特定故障(如区域控制器故障或车载控制器完全故障等),在区间停车,无法继续向前或向后运行时,需由司机切换人工驾驶模式或atp切除模式继续运行列车到临近车站清客下线。在无人驾驶线路中,如果发生类似的故障,则需要将乘客在区间疏散,或由司机从站台走到区间列车登乘,对线路运营的影响非常大,将直接导致至少30分钟以上的晚点,甚至在疏散过程中发生恶劣的公共安全危害事件。
2、目前有一些技术方法,可通过远程控制技术远程驾驶列车,使可以列车继续运行。经过检索中国专利公开号cn113022653a公开了一种基于低时延传输技术的远程列车驾驶系统及方法,具体公开了远程驾驶控制模块与每辆列车上的远程驾驶命令接收器之间通过低时延传输网络进行信号传输,远程驾驶命令接收器与车载cc的tod连接,获取车辆本地的操作界面信息并发送给远程驾驶控制模块,远程驾驶控制模块将该信息发送给远程驾驶控制台,通过远程驾驶控制台进行tod界面显示;远程驾驶控制台用于接受远程驾驶员的控制,并向远程驾驶控制模块下发控制命令,远程驾驶控制模块将控制命令转换为控制量,并通过低时延传输网络发送至远程驾驶命令接收器。
3、但是该现有专利通过一套独立的车载控制器实现,只描述了如何控制列车运行,然后,并未说明其与主用车载信号系统的关系,如何进行切换,正常情况下如何不影响主用车载信号系统的使用,避免其输出命令对车辆产生作用。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种轨道交通列车远程驾驶系统及其切换方法、设备及介质。
2、本发明的目的可以通过以下技术方案来实现:
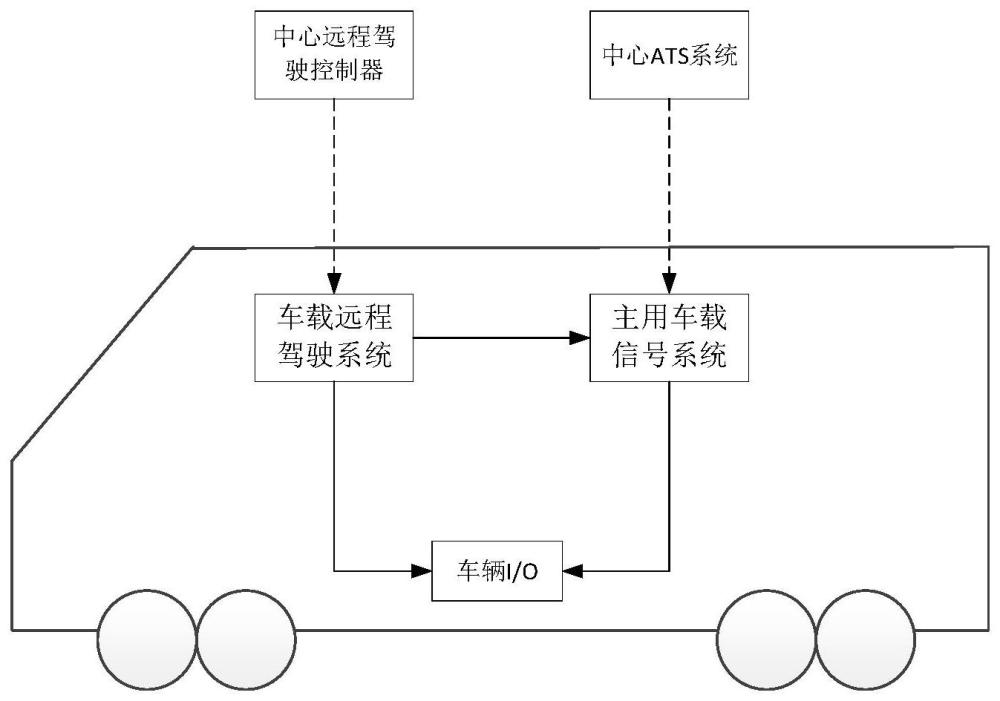
3、根据本发明的第一方面,提供了一种轨道交通列车远程驾驶系统,该系统作为主用车载信号系统的后备系统,该系统包括车载远程驾驶系统以及设在轨旁的中心远程驾驶控制器,所述车载远程驾驶系统分别与主用车载信号系统和中心远程驾驶控制器通信连接;
4、所述中心远程驾驶控制器在主用车载信号系统切除后,激活需要前进方向侧的车载远程驾驶系统,所述车载远程驾驶系统通过安全确认操作来下发控制动车指令。
5、作为优选的技术方案,所述车载远程驾驶系统识别前方环境、轨道及轨行区域,并界定“行车限界”,并以非接触方式探测“障碍物”目标的距离,发现障碍物侵入“行车限界”内,通过中心车辆调度提示调度人员。
6、作为优选的技术方案,所述中心远程驾驶控制器对列车进行牵引、制动或发送紧急制动控车指令,在行车过程中,监控列车当前车速,当列车车速大于预定值时,提示操作人员或施加紧急制动。
7、作为优选的技术方案,所述车载远程驾驶系统还与车辆接口连接,所述车辆接口内置远程驾驶模式允许电路、远程驾驶模式激活电路、atc切除电路和车辆驾驶命令执行电路。
8、作为优选的技术方案,所述远程驾驶模式允许电路包括继电器k1;
9、当主用信号车载系统不允许切换到车载远程驾驶系统控车时,所述继电器k1得电,主用信号车载系统允许远程驾驶安全输出触点闭合;
10、当主用信号车载系统允许切换到车载远程驾驶系统控车,或主用信号车载系统故障时,所述继电器k1失电,主用信号车载系统允许远程驾驶安全输出触点断开。
11、作为优选的技术方案,所述远程驾驶模式激活电路包括继电器k2;
12、当所述继电器k1失电时,同时车载远程驾驶系统收到中心远程驾驶控制器的激活命令后,控制继电器k2得电,使车载远程驾驶系统激活输出的接点闭合。
13、作为优选的技术方案,所述atc切除电路包括与继电器k2接点并联的atc切除按钮;
14、所述继电器k2得电后,所述继电器k2接点闭合,所述atc切除按钮闭合,从而使主用车载系统安全输入得电,进入atc切除模式,将主用车载系统对车辆输出设置为限制状态。
15、作为优选的技术方案,所述车辆驾驶命令执行电路包括继电器k3;
16、所述继电器k2得电后,所述继电器k3受车载远程驾驶系统的输出控制,完成主用车载信号系统到车载远程驾驶系统对车辆的控制切换。
17、根据本发明的第二方面,提供了一种采用所述轨道交通列车远程驾驶系统的切换方法,该方法包括主用车载信号系统切换到车载远程驾驶系统的过程,以及车载远程驾驶系统切换到主用车载信号系统的过程。
18、作为优选的技术方案,所述主用车载信号系统切换到车载远程驾驶系统的过程具体包括以下步骤:
19、步骤s101,列车在区间应急停车;
20、步骤s102,在主用信号系统的ats界面上封锁应用车载远程驾驶系统控车的区域;
21、步骤s103,根据ats界面上的列车状态判断主用车载信号系统是否工作正常,若正常,执行步骤s104,否则执行步骤s105;
22、步骤s104,向主用车载信号系统发送命令,使主用车载信号系统允许切换为车载远程驾驶系统控车;
23、步骤s105,中心远程驾驶控制器向车载远程驾驶系统发送远程驾驶控车命令;
24、步骤s106,车载远程驾驶系统收到命令后,向车辆发送远程驾驶模式激活;
25、步骤s107,车辆使用远程驾驶模式控车;
26、步骤s108,中心远程驾驶控制器控制车载远程驾驶系统牵引及制动,使列车向前运行。
27、作为优选的技术方案,所述车载远程驾驶系统切换到主用车载信号系统的过程具体包括以下步骤:
28、步骤s201,中心远程驾驶控制器发送取消远程驾驶控车命令;
29、步骤s202,车载远程驾驶系统收到后,向车辆发送取消远程驾驶模式激活;
30、步骤s203,向列车发送命令,取消允许远程驾驶控车命令;
31、步骤s204,车辆恢复主用车载信号系统控制,车载远程驾驶系统控车无效;
32、步骤s205,在ats界面上取消封锁应用远程驾驶系统控车的区域。
33、根据本发明的第三方面,提供了一种电子设备,包括存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现所述的方法。
34、根据本发明的第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现所述的方法。
35、与现有技术相比,本发明具有以下优点:
36、1)本发明可作为主用车载信号系统的后备系统,并能安全地进行两个系统之间的切换,与车辆的接口简单;通过中心调度/维护人员即可完成远程控制列车向前或向后运行,使列车以低速自动运行到临近车站站台。
37、2)本发明实现了“远程驾驶系统不能干扰主用系统的正常运行,非远程驾驶系统控车时,其输出对车辆无效”的效果。
38、3)本发明系统检测到触发事件后,不需要实时计算联动动作及区域,只需查找配置文件中的数据执行相应动作即可,节省了软件实时处理的系统资源开销。
39、4)本发明配置文件可读性好,便于设计及验证人员核对确认设计与需求的一致性,软件测试时不需要由软件遍历每个场景在线路每个地方的响应是否与预期设计一直,节省了软件测试时间。
本文地址:https://www.jishuxx.com/zhuanli/20240718/234742.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表