用于车辆的制动系统、车辆动力学系统、车辆和用于操作制动系统或车辆的方法与流程
- 国知局
- 2024-08-02 16:33:20
本发明涉及用于电动车辆并且特别是具有高度自动驾驶(had)或完全自动驾驶(fad)的车辆的制动器的液压致动系统的装置。
背景技术:
1、汽车行业正在经历颠覆性的变革过程。除了电动车辆的市场渗透率不断提高外,自动驾驶正在经历各个阶段,这些阶段最初是:3级-高度自动驾驶-had,4级-全自动驾驶-fad,以及5级-自主驾驶-ad,每个级别都增加了对所用的制动系统的要求。
2、这推动了新型制动系统向前发展。在最初的方法之后,2005年开始用电动制动助力器(e-bkv)替代真空制动助力器[atz第6/11版],2013年在市场上推出了所谓的带有电动从动制动助力器和额外esp单元的双箱解决方案[atz第4/18版],随后不久又在2017年推出了带有踏板模拟器的首个集成单箱系统[制动器手册-第20章]。目前正在开发3级(had)的解决方案。
3、从3级(had)开始,首次强制要求冗余的压力供应。另外,在开放式制动系统的情况下,应当尽可能避免制动回路与储液器之间的连接,并且应当使用具有恒定踏板特性的踏板感觉模拟器。还必须提供abs功能的冗余度。根据de 11 2009 005 541 b3的现有技术,在所谓的带有电动制动助力器和esp/abs单元的双箱系统中,以这样的方式实现abs功能的冗余度:电动制动助力器(e-bkv)在esp单元发生故障时接管压力调节功能,以便始终确保较高的车辆减速。在第一步中,引入了所谓的“abs低选控制”。
4、从4级(fad)开始,为了足够的系统可用性需要3倍冗余,例如,踏板传感器的规则是“3选2”。另外,由于电动车辆的恢复性能不断增加,而且因为在切换到领航驾驶时,全自动驾驶(fad)可以在较长的时间段内操作,而使车辆驾驶员对切换到无人驾驶时的踏板特性变化没有准备,从而无法接受踏板特性的变化,因此踏板模拟器是必不可少的。为了监测压力供应,必须提供冗余的压力传感器,或者必须提供替代的诊断选项。还将需要至少具有单独轴控制的冗余abs功能,并且将引入部分冗余。在abs操作中具有封闭制动回路的制动系统具有安全优势。
5、在5级(ad)中,踏板位置传感器和踏板模拟器以及它们的特性不再重要。相反,其余部件和子系统将具有三重冗余或具有多重冗余,在三重冗余中,传感器、控制和调节单元ecu和部分-ecu的规则是“3选2”。另外,必须为车轮特定控制提供完整的冗余。
6、一些新的车辆制造商,比如苹果(apple)、优步(uber)和waymo,正在研究没有车辆驾驶员的完全自主的车辆,该车辆在第一扩展阶段具有带有简单踏板感觉模拟器单元的制动踏板(4级fad),而在最后扩展阶段(5级ad)应当不再有制动踏板。另外,在后轴和前轴上都装有强大的电动驱动马达的车辆正变得越来越流行。
7、除了描述的电液制动系统之外,机电制动器(emb,机电楔形制动器)是已知的解决方案。由于安全问题和高成本,emb在过去没有流行起来。高成本特别是由于每个车轮制动器都需要电动马达和复杂的机电机构的事实。另外,emb具有大量的电气接触点,众所周知,这些接触点比液压管路更容易发生故障。
8、因为成本和可靠性的原因,fad和ad级别的制动系统不能仅具有emb或楔形制动器。emb仅适用于车辆的后轴,因为后轴的制动力份额较小,故障不会被视为像前轴上的故障那样严重。因此,优选的是液压制动系统,该系统经由电驱动的活塞-气缸单元在主要的封闭制动回路中进行控制。
9、在de 10 2005 055 751 b4和de 10 2005 018 649 b4中,通过具有主轴驱动器的电驱动活塞-气缸单元实现高精度活塞压力控制(ppc)。使用非线性映射、即所谓的压力-体积特性来控制压力,在该映射中评估了压力与活塞位置之间的关系。替代性地或额外地,通过电动马达的相电流控制来使用压力,电流与转矩之间成比例的物理关系,以及由于已知的活塞面积和固定的齿轮比,电流与压力之间成比例的物理关系也存在并被使用。通过这两个参数,可以非常精确地控制压力和压力变化曲线。
10、在ep 1 874 602 b1和ep 2 396 202 b1中描述了所谓的多路复用方法(mux),该多路复用方法特别适用于4级和5级的要求,因为如之后所解释的,封闭的制动系统没有任何休眠故障。另外,可以仅用一个开关阀或者同时或者一个接一个地对多个车轮制动器进行加压和减压。对电动马达的高动力学要求是不利的,特别是如果所有车轮制动器都由一个马达控制。这需要具有双气隙的特殊马达(ep 1 759 447 b1),或者需要具有非常低的惯性质量的马达。
11、在wo201614622a2中,还实现了开关阀的特殊阀回路,其中开关阀的内部经由液压管路连接至相关的制动回路,并且阀座补偿经由液压管路连接至相关的车轮制动器。这种阀的开关特别适用于每个制动回路仅有一个开关阀的mux方法,因为在发生故障时,电磁阀由于车轮制动器中的压力而打开,从而防止压力继续锁定在车轮制动器中,从而导致不期望的车辆减速。
12、从ep 3 271 221 a2中已知进一步开发的mux方法(mux 2.0),其中每个制动回路仅有一个出口阀。这意味着可以大大降低多路复用操作的动力学要求,因为在压力变化动力学要求极高的情况下,也可以经由出口阀降低压力,而且在正常操作期间,制动系统在封闭的制动回路中运行。结果,对电动马达的动力学要求可以大大降低,或者使用多路复用方法可以实现非常好的调节。
13、从wo 2012 059 175a1中已知带有两个路径传感器和作用于这两个路径传感器之间的弹性元件的有利的致动单元(be),制动系统的控制器利用该致动单元来测量和使用差分路径和/或差分力。具有这样的致动单元的制动系统,辅以踏板感觉模拟器,需要3级至5级的多重冗余的要求。
14、制动系统的某些部件将被视为对安全至关重要。这些是活塞、电磁阀和滚珠丝杠驱动器的密封件。以下列出了各种故障和它们的影响:
15、·活塞:活塞密封件可能发生故障,尽管泄漏可能不会在低压下发生,例如,仅在高压下发生。泄漏会导致活塞功能故障。活塞用于路径模拟器、压力供应器和主制动缸(hz),并且活塞可能导致踏板发生故障或压力供应器发生故障。
16、·电磁阀:污物颗粒会沉降在阀座上。例如,如果开放的制动系统中的电磁阀连接至储液器,则当它们关闭时,颗粒会沉降并且连接会不密封。在打开时则无法诊断出密封性。
17、·滚珠丝杠驱动器:滚珠丝杠驱动器在其使用寿命内会磨损并且可能卡住,特别是如果污物颗粒进入到滚珠丝杠驱动器中。这可能导致压力供应器发生故障。
18、对于3级(had)、4级(fad)和5级(ad)制动系统以及对于在一个或更多个轴上具有越来越强大的电动驱动马达的电动车辆,其要求可以总结如下:
19、-完全无噪音运行,即没有来自舱壁上的各单元的干扰噪音;
20、-由于电动车辆的新车辆平台概念,其结构甚至比传统汽车更短;
21、-即使在模块完全或部分故障的情况下,也能对单个车轮或轴进行制动干预;
22、-即使在模块完全或部分故障的情况下,对功能范围abs、esp、asr、恢复和扭矩矢量的性能的限制也可能最小;
23、-通过最大限度地利用电动马达的制动功率,最大限度地恢复车辆的动能;因此,根据需要对液压制动系统进行动态且精确的控制;
24、-使用可用的制动扭矩,例如来自驱动马达的制动扭矩,以简化制动系统或缩短制动距离;
25、-通过系统、信号传输和电力供应的冗余来提高安全性;
26、-用于检测泄漏或避免休眠故障的诊断方法;
27、-对控制准确度有较高要求,以进一步减少制动距离,特别是当电动驱动马达和液压制动扭矩一起工作时;
28、-系统的高度模块化,即使用相同的零件/模块,特别是对于压力供应器;模块化由大量的车辆驱动概念推动,特别是在带内燃发动机的车辆、混合动力车辆和纯电动车辆(内燃发动机、混合动力发动机、纯电动车辆、无人驾驶车辆)共存的情况下。
技术实现思路
1、本发明的目的是提供一种满足高度自动驾驶(had)和完全自动驾驶(fad)中的高可用性要求并且也适用于电动车辆的制动系统。
2、本发明的目的是通过具有本技术的第一主要方面的特征的制动系统实现的。根据本技术的第一主要方面的制动系统的有利设计源于本技术的附属方面的特征。
3、有利地,本发明的特征在于,根据本发明的制动系统为高度自动化驾驶、完全自动驾驶(had、fad)提供了足够高的系统相关部件的冗余度,同时在制动系统与电动车辆的电动驱动马达的相互作用中可以使用高协同效应。例如,电动马达动能的能量恢复不受制动系统的限制,例如在没有根据de 11 2009 005 541 b3的路径模拟器的从动制动助力器的情况下,同时电动马达可以有助于制动。根据本发明的制动系统对于had和fad来说有利地配备有带有踏板感觉模拟器的致动单元(be)。
4、对于4级(fad),应当为完全自动驾驶提供具有相应冗余的致动单元。致动单元具有与至少一个制动回路连接的液压连接。
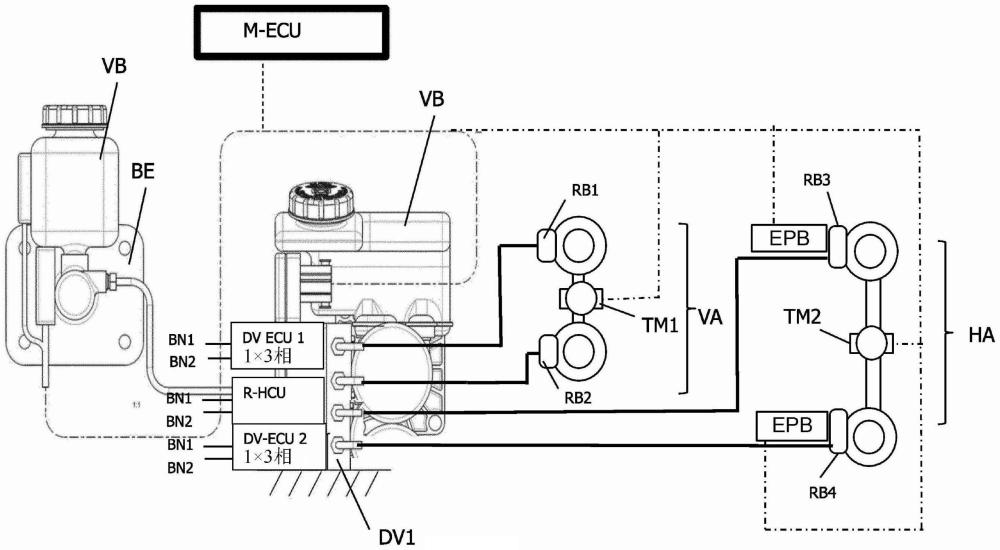
5、提供中央控制和调节单元(m-ecu)也是有利的,该中央控制和调节单元是制动系统的各个部件的上级并且控制制动系统的各个部件。
6、对于车轮特定冗余制动控制,本发明在基本实施方式中规定,压力供应装置或者仅在车辆的一个轴上或者在车辆的两个轴上实行压力控制。压力供应装置有利地具有两个相互独立的电子控制和调节单元或双重冗余控制和调节单元,以用于控制该压力供应装置的电动马达驱动器,使得如果一个控制和调节单元发生故障,则另一个仍然发挥作用的控制和调节单元仍然可以控制驱动器。
7、两个电子控制和调节单元中的每个电子控制和调节单元都有利地控制彼此独立的电动马达驱动器的绕组或相位系统。这有利地确保了如果绕组或相位系统发生故障,驱动马达仍然能以最大扭矩的至少一半运行。这种设计至少为压力供应装置和该压力供应装置的控制提供了多个冗余。
8、在又一实施方式中,压力供应装置,连同阀组件和分配给压力供应装置的至少一个电子控制和调节单元,可以被组合以形成模块或组件。这导致了紧凑且廉价的单元,该单元可以以节省空间且简单的方式容纳并安装在车辆中。
9、在又一实施方式中,压力供应装置,连同阀组件和分配给压力供应装置的至少一个电子控制和调节单元一起,可以被组合以形成模块或组件。这里可以提供简单的主制动缸或串联式主缸——可选择地带有冗余的密封件,以及绝对必要的路径模拟器。
10、上述制动系统在控制操作中利用封闭的制动回路有利地进行调节,即在控制操作中不存在经由储液器中的电磁阀的压力降低,和/或使用多路复用方法和/或同时地控制或设置各个制动回路的车轮制动器中的压力。为了安全起见,开关阀应当连接至车轮制动器使得该开关阀由于车轮制动器中的压力而自动打开。这有利地确保了车轮制动器中的制动压力在任何情况下都可以降低,并且不会发生不期望的制动或锁定车轮。
11、如果在上述制动系统中,在控制操作中发生压力降低,尤其是在非常高的压力动力学需求下、例如在高-μabs控制下,特别是在车轮制动器中的压力供应的控制和调节装置和/或压力供应装置发生故障时通过打开储液器中的出口阀,特别是在所有车轮制动器的压力供应装置接管压力控制的扩展多路复用操作(所谓的mux 2.0方法)中使压力降低,则也是有利的。
12、在上述制动系统的另外的非常有利的设计中,至少一个车轮制动器——优选地是两个车轮制动器,是液压支持机电制动器(h-emb)、电动驻车制动器(epb)或机电制动器(emb)。类似地,除了常规的液压车轮制动器之外,电动马达、额外的驻车制动器或液压支持制动器或机电制动器可能对车轮有制动作用。该措施产生了额外的冗余。当提供了液压支持机电制动器时,可以有利地以液压方式和以机电方式用该液压支持机电制动器增加制动力。
13、如果为车辆的至少一个轴或车轮提供至少一个电动驱动或牵引马达,这也可以有利地用于制动轴或车轮。这提供了额外的冗余。在正常操作中,或者如果制动系统的部件、例如压力供应装置发生故障,也可以通过牵引马达产生(支持)制动力。通过联合使用压力供应装置、液压支持机电制动器h-emb、电动驻车制动器epb和/或机电制动器emb和/或一个或多个驱动马达,在控制操作中或在制动系统的一个或多个部件发生故障的情况下,可以有利地以更短的锁定时间(ttl)或更高的制动扭矩更快地增加制动力。
14、在上述制动系统中,压力供应装置可以有利地在压力供应器的出口处前面有分离阀,压力供应装置能够通过关闭该分离阀与制动回路断开连接,特别是在该压力供应装置发生故障时。
15、为了使根据本发明的制动系统更加安全地应对故障,阀组件和压力供应装置的至少一个控制和调节装置可以具有独立的电压供应和/或信号传输,特别是压力供应装置的所有模块可以由至少两个车辆电气系统供应和/或压力供应装置的所有模块具有冗余的信号传输。两个车辆电气系统被理解为意味着或者使用不同的电压水平以及/或者使用不同的电压源来对制动系统进行供应。
16、如果在根据本发明的制动系统的上述可能的实施方式中,使用至少一个压力传感器以及/或者经由驱动器的马达电流的电流测量和压力供应装置的活塞的路径控制来进行制动回路中的压力控制,则也是有利的,其可以通过考虑驱动器的温度来进一步在压力控制质量方面细化。这样即使在没有压力传感器的情况下也能实现精确的压力控制,正如申请人在de 10 2005 055 751 b4中已经详细解释的在没有温度传感器的情况下的功能。
17、同样有利的是,如果制动系统的活塞-气缸单元具有冗余的密封件和液压诊断管路,并且,还提供冗余的控制和调节单元,压力供应装置的驱动器具有2×3相,并且,通过马达电流i相的传感器,在压力控制中测量和考虑马达角度α、特别是温度t,并且,特别是存在经由两个车辆电气系统或电压等级的冗余供应,并且,提供有冗余的信号传输。所有这些措施的提供有利地产生了非常安全的系统,该系统适用于3级和4级。
18、上述制动系统可以有利地以这样的方式运行:通过压力供应装置、电动驱动马达和液压支持机电制动器(h-emb)至少为每个轴、优选地为每个车轮或机电制动器(emb)进行车轮的减速。扭矩矢量也可以通过压力供应装置、电动驱动马达(tm)和液压支持机电制动器(h-emb)或机电制动器(emb)来进行。
19、当使用温度传感器时,压力供应装置的驱动器的温度也可以被确定,并且该温度可以用来更精确地确定扭矩常数,该扭矩常数由于温度升高而以系数(1-br%*δt)线性下降。这样允许甚至更精确地控制扭矩,并且因此控制压力,只要这是基于相电流i的,因为扭矩=kt(t)*相电流i的关系适用。
20、对于压力控制,除了电流控制之外,还可以使用活塞位置和压力体积特性,并且在例如夹杂空气的情况下,压力体积特性的变化可以由压力传感器或h-emb进行调整。联合使用上述两种方法产生了高精度的压力控制,这在没有压力传感器的情况下也是可能的。这种方法在压力传感器发生故障时提供额外的冗余,或者这种方法也可以用来简化冗余要求低的系统(例如,只有一个压力传感器或没有压力传感器的系统)。
21、根据本发明的制动系统也可以用于转向/扭矩矢量,其中,可以使用具有至少一个压力供应器和液压支持机电制动器h-emb、电动驻车制动器epb和/或机电制动器emb和/或驱动马达或转向器eps的车轮特定控制选项。
22、因此,本发明的特征在于结构非常简单,可用性非常高,即在模块完全或部分故障的情况下,功能不受限制或限制在非常小的范围内。即使各种部件发生故障,也能始终确保几乎最大的减速和驱动稳定性。为此,即使压力供应装置发生故障,也能保证高达大约0.9g的减速和基于轴的控制,优选地是具有转向干预/稳定干预的车轮特定控制。因此,高水平的可用性和性能是通过以下措施实现的——再次集体实现,这些措施可以单独地或组合提供:
23、-主要在制动助力器(e-bkv)、恢复操作以及主要在abs控制操作中的封闭的制动回路中运行(>90%的运行时间),从而避免休眠故障。如果系统以开放的方式运行,例如在abs中以开放的方式运行,则系统通过打开车轮回路的出口阀而与储液器液压连接,这使得特别难以检测阀和密封件中未检测到的泄漏(休眠故障)。因此,应当避免该操作状态,或者在每次abs操作后对密封性进行诊断是有用的;诊断可以以这样的方式进行:例如,当阀关闭时,移动压力供应器的活塞,并且确定和评估体积损失或压力增加;
24、-dv马达电子器件的冗余和部分冗余:例如,将dv的马达设计为2×3相马达以及马达控制的部分冗余。这意味着,如果电子部件中的一个电子部件发生故障(绕组短路、3相线路故障),仍然能以一半的扭矩运行马达。在设计为200巴的情况下,则在发生故障时也可以实现100巴,即大约是阻断压力。这意味着,即使电子器件中的一个电子器件发生故障,abs操作也可以在低摩擦系数的情况下实现最大性能并且在高摩擦系数的道路条件下实现令人满意的性能;
25、-用于阀控制的电子器件的部分冗余。在电子装置发生故障的情况下,如果开关阀仍然可以操作,这对可用性是非常有利的。因此,在电子器件中要提供用于阀控制的冗余,使得如果发动机控制发生故障,阀致动仍然能发挥作用;
26、-在发生故障的情况下,即压力供应发生故障或部分故障的情况下,用开关阀在封闭的mux操作中运行,并且使用出口阀(每个轴至少1个av)。这意味着仍然能以低马达功率维持压力动态控制,因为压力可以由压力供应器依次或同时增加和降低,而且也可以经由出口阀降低压力;
27、-在制动操作中使用h-emb、emb或epb,特别是在模块故障的情况下使用epb或h-emb。这意味着,一方面,可以经由液压通道和经由内置在h-emb中的电动马达对车轮进行制动。电动马达可以设计成ec马达或有刷马达。因此,可以通过各个车轮上的电动马达提供制动支持;
28、-使用所使用的牵引马达来增加制动扭矩,同时恢复车辆动能。然而,由于驱动马达的高惯性,必须考虑到经由牵引马达增加的制动扭矩比经由压力供应器和h-emb、epb或emb增加的制动扭矩的动态性要小;
29、-使用带有踏板感觉模拟器、冗余位移传感器和力-位移传感器(kws)的故障安全和能够诊断的致动单元以及用于诊断踏板感觉模拟器的特殊回路;
30、-通过滞留在车轮制动器中的压力,特别是在断电状态下,使用具有自开机制的阀;
31、-通过经由开关阀fv连接致动单元,在制动回路或轴中使用液压回落水平;
32、-当达到体积限制时,后续输送dv的体积;
33、-在没有压力传感器的情况下,通过从相电流中智能、精确的扭矩估计来操作压力位置,这考虑到马达温度和压力体积特性,其经由压力传感器或h-emb功能进行比较;
34、-在dv发生故障的情况下,使用av从mux方法中的正常操作2轮操作切换到mux 2.0方法中的4轮操作;
35、-使用梯形主轴(不会由滚珠丝杠驱动器的滚道中的污物颗粒堵塞主轴);
36、-自锁梯形主轴->省去了fv和tv。
37、表1列出了正常操作(控制操作)和四种不同的故障情况故障1至故障4的各种车轮控制功能。
38、在第一行显示和解释正常操作。压力供应装置dv产生最大的所需控制功率。出口阀av在90%至99%的控制时间内不使用,仅在极端情况下打开以快速降低储液器中的压力。踏板感觉是恒定的,因为线控制动操作是完全解耦的。能量通过电动驱动马达tm1和tm2进行恢复,并且压力供应器的压力曲线与驱动马达随时间变化的扭矩曲线相适应,使得车辆驾驶员无法确定电动液压制动系统是单独使用还是与恢复一起使用。
39、发生故障f1时,压力供应装置dv的驱动装置的3相系统发生故障,压力供应装置仍然可以经由第二3相系统增加制动压力并且控制abs控制操作。这里可以在较大程度上将av阀用于减压控制,以避免abs控制性能的明显损失。因为压力供应器仅能输送正常状态下的压力的一半,所以使用电动驱动马达来增加制动扭矩。在强大的电动马达的情况下,因此可以安全地实现车轮锁定压力。
40、发生故障f2时,通过压力供应装置dv的压力供应不再可能。在这种情况下,致动装置用于使车辆减速,通过该致动装置可以增加车轮制动器的制动压力。此外,牵引马达可以用于对车辆进行制动。液压支持机电制动器h-emb或纯机电制动器emb也可以提供制动力以使车辆减速。
41、发生故障f3时,只有压力传感器dg发生了故障,通过压力供应装置的测量的马达电流和使用压力-体积特性的路径控制仍然可以进行压力控制,这可以通过温度测量进一步改进。在发生这种故障时,诊断功能也可以继续运行。
42、发生故障f4时,环境影响(例如,气泡)和磨损导致需要向制动回路供应更多的制动流体,这可以在任何时候使用压力供应装置实行,并且不影响踏板感觉。
43、表2显示了制动和各种动力学控制功能(电动制动助力器e-bkv、abs操作、转向/扭矩矢量、稳定性控制/esp、恢复和驻车制动器),这些功能可以由以下部件形成:压力供应器dv1、驱动马达tm1、tm2、转向器eps和液压支持的h-emb或驻车制动器epb。因此,确定了主要功能和次要功能/冗余。这清楚地表明,本发明中最重要的车辆动力学功能至少是双重冗余的,并且该系统因此适用于3级(had)甚至4级(fad)。
44、制动系统也可以以这样的方式简化:从该系统中得出具有较低的冗余要求以及主要供电装置与制动单元的合理组合的非常有成本效益的系统,例如用于诸如印度、巴西、中国的金砖国家。这里,省去了带有冗余ecu的压力供应装置的冗余,例如2×3相,并且通过由车辆驾驶员经由致动单元产生的压力和电动马达tm的减速使用液压回落水平。这意味着,即使用简单的带活塞(hz)的致动单元,也可以达到当前法律要求的用于1级至2级自主驾驶的直至0.3g至0.5g的制动减速。另外,例如,可以省去压力传感器,完全根据ppc方法进行控制。这意味着,故障f1和f3不能再出现。如果使用h-emb,或者使用根据de 10 2007015809的液压支持驻车制动器,并且用电磁阀锁定驻车制动器中的压力,则也可以省略电动驻车制动器。如果液压管路发生故障或存在泄漏,则可以进行另外的输送或仍然可以经由牵引马达产生保持扭矩。
45、同样可以想象的是,如果产生的压力供应非常可靠,以至于可以用足够的fit率来排除活塞密封故障和滚珠丝杠驱动器的阻塞,则可以省略致动单元。
46、根据本发明的压力供应装置也可以由旋转泵驱动,该旋转泵特别地可以是齿轮泵。然后它可以具有马达壳体,该马达壳体中布置有驱动齿轮泵的电动马达驱动器。为此,驱动器具有定子和转子。经由驱动器的转子移动齿轮泵的内部齿轮。根据本发明,驱动器通过至少一个密封件设计成干式转轮,该密封件布置在转子与内齿轮之间,或者驱动器具有干式运行的转子,即由齿轮泵输送的介质不在驱动器的转子周围流动,和/或驱动器的转子不被介质包围。由于设计为干式转轮,转子旋转时没有大的摩擦和流动阻力,这意味着可以实现更高的速度和更好的效率。
47、当马达壳体具有侧壁,齿轮泵布置在该侧壁上,特别是该侧壁具有凹槽,齿轮泵至少部分地或全部插入该凹槽中时,就可以获得特别紧凑和简单的压力供应装置。马达壳体的侧壁可以由轴穿透,该轴以在旋转上固定的方式连接至转子,齿轮或者以在旋转上固定的方式连接至该轴,或者经由插入的齿轮和/或离合器联接至该轴。
48、如果驱动器及其壳体靠在液压壳体上,而该液压壳体内布置有至少一个阀和/或液压管路或通道,或者驱动器及其壳体与该液压壳体形成一单元,则可以获得上述压力供应装置的有利的紧凑和集成设计。驱动器壳体的侧壁可以与液压壳体的侧壁邻接或毗连、特别是附接至液压壳体的侧壁,特别地呈罐形的凹槽至少部分地或完全地接纳齿轮泵并且朝向液压壳体打开。在壳体相邻布置的情况下,齿轮泵可以完全停留在驱动器壳体的壁的凹槽中、完全停留在液压壳体的凹槽中、或者停留在驱动器壳体的侧壁的凹槽中和液压壳体的侧壁的凹槽中。在后一种情况下,这两个凹槽的开口则相互面对。可以提供额外的密封件,以便将两个壳体相互密封并对外部密封。
49、上述驱动器壳体的侧壁上的凹槽有利地向外部敞开,并且如果存在液压壳体,则向该液压壳体敞开。凹槽本身可以有利地设计成罐的形状。凹槽也可以有横截面是圆形的筒状部分,并且齿轮泵与该齿轮泵的齿轮停留在该凹槽中。
50、驱动器壳体的侧壁也可以有利地设计成凸缘,驱动器可以通过该凸缘紧固至另一零件或单元。
51、在根据本发明的压力供应装置中使用的齿轮泵可以是带有镰刀的内部齿轮泵、外部齿轮泵或齿环泵。
52、如果驱动器的定子和/或转子的结构和尺寸不受齿轮泵的不利限制,则齿轮泵也可以有利地轴向布置在该定子和/或转子旁边。齿轮泵的尺寸和结构则不依赖于定子和转子的尺寸。
53、驱动器壳体可以设计成至少两个部分,侧壁是第一壳体部分的一部分或形成第一壳体部分。第二壳体部分例如可以是罐形的,并且容纳驱动器的定子和转子。
54、如前所述,转子通过驱动轴直接地或经由变速器和/或离合器连接至齿轮。齿轮可以或者通过力配合连接或者通过形状配合连接——特别是通过销钉或锯齿形成的连接——以在旋转上固定的方式连接至驱动轴。在齿轮环泵中,内部齿轮偏心地布置在与驱动轴连接的部分上,特别是以圆盘或凸轮盘的形式。
55、当根据本发明的压力供应装置的齿轮泵设计成内部齿轮泵或设计成齿环泵时,除了内部齿轮之外,还需要外部的内环齿轮圈。在内部齿轮泵的情况下,内环齿轮通过由驱动轴驱动的内部齿轮绕该内环齿轮的旋转轴旋转,内齿轮与内环齿轮偏心地布置。内环齿轮在围绕该内环齿轮的外环或气缸中旋转。此外,必须提供镰刀,该镰刀必须布置在内环齿轮与内齿轮之间因偏心而产生的空间中。
56、与内部齿轮泵相反,内环齿轮固定地布置在齿轮环泵中,内齿轮滚动由于其偏心地安装在圆盘上而通过内环齿轮中的驱动轴旋转。不需要与内部齿轮泵一样的镰刀。
57、根据本发明,驱动轴可以通过合适的轴承、特别是径向轴承以球轴承或滚柱轴承和/或轴向轴承的形式或者支承或者安装在以下位置:
58、a)一方面在马达壳体内,另一方面在齿轮泵和/或液压壳体中,或者
59、b)仅在齿轮泵中,或者
60、c)在液压壳体和马达壳体中,或者
61、d)在齿轮泵和液压壳体中。
62、如果提供液压壳体,则驱动轴可以延伸到液压壳体中,特别是直到该液压壳体的与驱动器相对的一侧。例如,传感器的目标可以布置在驱动轴上,传感器布置在控制和调节单元(ecu)中。额外的密封件可以防止输送的介质进入控制和调节单元。也有可能驱动轴直接延伸穿过液压壳体,并且终止于与该液压壳体相邻的壳体,例如控制和调节单元。
63、齿轮泵可以不同地设计为内部齿轮泵。因此,在第一实施方式中,内齿轮、内环齿轮、镰刀和外环可以布置在两个圆盘之间,在对零件互相进行适当的定心和调整后,圆盘牢固地连接至外环。内聚的连接可以一直围绕圆周延伸,从而形成稳定和紧凑的实施方式,在该实施方式中,各个运动零件彼此之间仅具有较小的间距和间隙,由此实现了良好的效率并且可以实现高压。
本文地址:https://www.jishuxx.com/zhuanli/20240718/251263.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表