一种跨域无人平台的推进器多模态空间折展装置
- 国知局
- 2024-08-02 16:36:07
本技术属于跨域机器人领域,更具体地,涉及一种跨域无人平台的推进器多模态空间折展装置。
背景技术:
1、跨域无人平台具有环境适应性强、操作范围广、易于实施等特点,是在极端两栖环境下执行岛屿视察、环境监测、救援安防等任务的理想选择。由于海域的探索中会遇到各种复杂环境(如海浪扰动,水下阻力大等),因此跨域无人平台需要具备跨域机动能力,要求在陆域具有高速高通性能,能够快速通过一些狭窄、恶劣环境;要求在水域具有高机动性,能够实现全方位机动。
2、跨域无人平台在水域环境中多采用推进器提供动力,其推进器系统布置决定了跨域无人平台在复杂水域环境下的适应性、通过能力以及行驶效率。目前,大部分跨域无人平台的推进器均为固定布置,机动性较差,而且推进器仅在水下作用,陆上便作为一种负载,会增加无人平台的尺寸,限制其通过性。
3、申请号为202111626551.5的中国专利公开了应用于跨域无人平台的多推进器联动折展装置和方法,其通过曲柄摇杆机构实现四个推进器同步折叠和伸展,但并不能改变推进器高度,且不能改变推进器的角度。申请号为202111626551.5的中国专利公开了一种无人系统柔性传动的变结构水下推进装置,其通过推进器起落机构和柔性传动机构实现了非平行轴的传动,能改变推进器的高度和向外伸展间距,但柔性的传动机构使得推进器不能在任意位置固定,且稳定性较差,容易受到水流等外部干扰,不能在任意位置保持,仅有两种工作模态,不能实现多方位机动。
4、现有相关技术中存在以下问题:现有技术下的跨域无人平台无法同时实现推进器的空间折展和任意位置保持,无法满足不同的运动需求,也无法适用复杂的工作环境。
技术实现思路
1、针对现有技术的缺陷,本技术提供了一种跨域无人平台的推进器多模态空间折展装置,目的在于通过实现推进器的空间折展和在任意位置保持,使推进器的位姿能根据具体场景进行调整,满足不同的运动需求,增加无人平台水域运动自由度,实现多方位机动,从而适用复杂的工作环境。
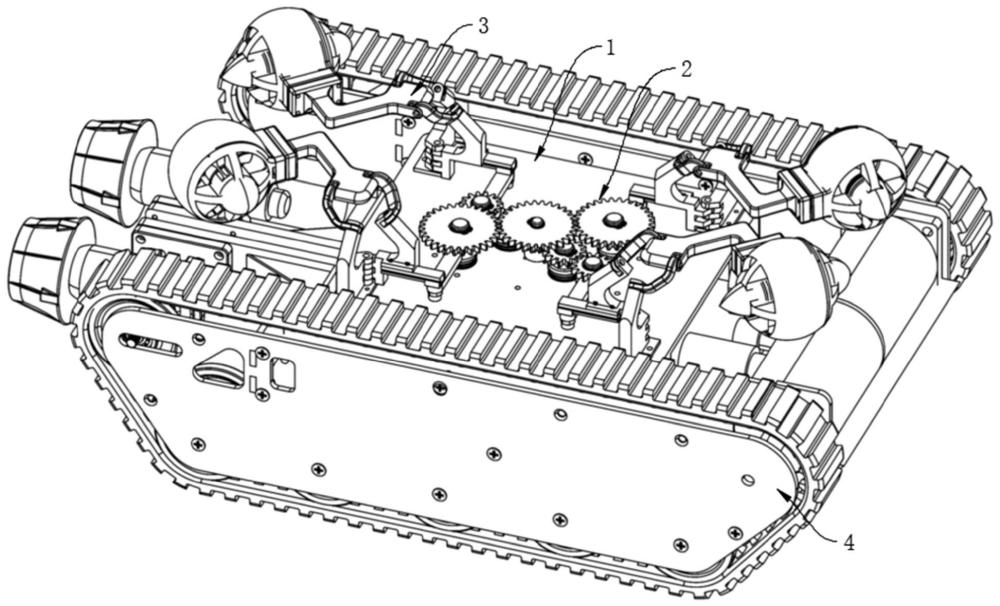
2、本技术提供的一种跨域无人平台的推进器多模态空间折展装置,包括底板、齿轮传动机构和多个推进器折展机构,所述齿轮传动机构和推进器折展机构均设置于所述底板上表面,并且多个所述推进器折展机构围绕齿轮传动机构设置;所述推进器折展机构包括传动组件和折展组件,所述传动组件设置于齿轮传动机构和折展组件之间,所述齿轮传动机构通过所述传动组件驱动折展组件展开或收缩;所述折展组件包括固定座、活动座和推进器支撑架,所述固定座固定连接于底板上,所述活动座与所述固定座转动连接且旋转轴垂直于底板上表面,所述固定座和活动座均与推进器支撑架活动连接,所述推进器支撑架的自由端固定安装有推进器,所述活动座转动以驱动推进器折展。
3、通过本技术所构思的以上技术方案,与现有技术相比,无人平台在航行过程中,实现了推进器空间折展,在不增加车体宽度的条件下,能够实现推进器任意高度变换与锁定,从而实现多种工作模态,以适用于陆地行驶,或者通过水下高度有限的管道和狭窄区域等各种复杂工作环境。
4、作为进一步优选的,所述折展组件还包括第一曲形连杆和第二曲形连杆,所述第一曲形连杆的一端与所述固定座转动连接,所述第一曲形连杆的另一端与所述推进器支撑架转动连接,所述第二曲形连杆的一端与所述活动座转动连接,所述第二曲形连杆的另一端与所述推进器支撑架转动连接。
5、作为进一步优选的,所述第一曲形连杆两端的旋转轴相互垂直,所述第二曲形连杆两端的旋转轴相互垂直。
6、作为进一步优选的,所述传动组件包括曲柄、滑块和导轨,所述滑块转动连接于所述曲柄的一端,所述导轨与所述活动座固定连接,所述滑块与所述导轨之间滑动连接,所述齿轮传动机构驱动所述曲柄的另一端转动,所述曲柄、滑块的旋转轴均与所述活动座旋转轴相平行。
7、作为进一步优选的,所述齿轮传动机构包括主动轴组件、两个第一从动轴组件和两个第二从动轴组件,两个所述第一从动轴组件和两个第二从动轴组件围绕主动轴组件设置,所述主动轴组件通过第一从动轴组件和第二从动轴组件驱动对应的所述曲柄转动。
8、作为进一步优选的,两个所述第一从动轴组件互为对角布置,呈中心对称结构,两个所述第二从动轴组件互为对角布置,呈中心对称结构。
9、作为进一步优选的,所述主动轴组件包括电机和第一主动齿轮,所述电机固定安装于所述底板上,所述第一主动齿轮同轴固定连接于所述电机的输出轴上,所述第一从动轴组件包括第一从动轴和第一从动齿轮,所述第一从动轴转动连接于所述底板上,所述第一从动齿轮同轴固定连接于第一从动轴上,所述第一主动齿轮与所述第一从动齿轮啮合,所述曲柄连接于所述第一从动轴上。
10、作为进一步优选的,所述第二从动轴组件包括第二从动轴和第二从动齿轮,所述第二从动轴转动连接于所述底板上,所述第二从动齿轮同轴固定连接于第二从动轴上,所述主动轴组件还包括第二主动齿轮,所述第二主动齿轮同轴固定连接于所述电机的输出轴上,所述齿轮传动机构还包括惰轮轴组件,所述第二主动齿轮通过惰轮轴组件驱动第二从动齿轮转动。
11、作为进一步优选的,所述惰轮轴组件包括惰轮轴和惰轮,所述惰轮轴转动连接于所述底板上,所述惰轮同轴固定连接于惰轮轴上,所述第二从动齿轮和第二主动齿轮均与所述惰轮啮合。
12、作为进一步优选的,所述底板通过螺钉固定连接于无人平台上,所述无人平台与所述电机电性连接,所述无人平台上设置有无人控制系统、陆地行走系统和水平推进系统。
13、综上所述,本技术至少包括以下有益技术效果:
14、1.本技术提供的一种跨域无人平台的推进器多模态空间折展装置,在航行过程中,实现了推进器空间折展,在不增加车体宽度的条件下,能够实现推进器任意高度变换与锁定,从而实现多种工作模态,以适用于陆地行驶,或者通过水下高度有限的管道和狭窄区域等各种复杂工作环境;
15、2.本技术提供的一种跨域无人平台的推进器多模态空间折展装置,折展组件基于厚板折纸原理设计,其组件自由度为1,结构间使用刚性连接,能实现推进器高度在一定范围内自由锁定,实现多种工作模态,能满足更广泛任务需求;
16、3.本技术提供的一种跨域无人平台的推进器多模态空间折展装置,通过一个防水电机结合齿轮传动、变向和折展机构便可以实现四个推进器自主同步空间折展,扩大了机构行程,该结构具有运动可变性,机构简洁,可实现同步控制,操控方法简便;
17、4.本技术提供的一种跨域无人平台的推进器多模态空间折展装置,折展组件利用传动组件与齿轮传动机构连接以实现推进器空间折展,其中活动座的摆动行程等于推进器支撑架带动垂直推进器的摆动行程,曲柄的摆动行程等于活动座的摆动行程,从而实现折展过程中传动关系的简易化,降低无人控制系统的控制难度,利于该折展装置部署;
18、5.本技术提供的一种跨域无人平台的推进器多模态空间折展装置,传动组件基于曲柄导杆机构原理设计,正向传动实现推进器折展过程中,其理论压力角为0度从而实现高效传动,降低电机驱动强度,节约能耗,进而有效增加跨域无人平台续航能力,拓展了跨域无人平台工作范围;
19、6.本技术提供的一种跨域无人平台的推进器多模态空间折展装置,在处于水平与垂直两个特殊点位置时,由于曲柄导杆机构特点,由外部环境造成的反力传递形成死点特性,此时推进器均不会反转,确保了跨域无人平台的工作稳定。
本文地址:https://www.jishuxx.com/zhuanli/20240718/251508.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表