用于将光分布投影到车辆的周围环境中的方法和装置与流程
- 国知局
- 2024-08-02 16:53:43
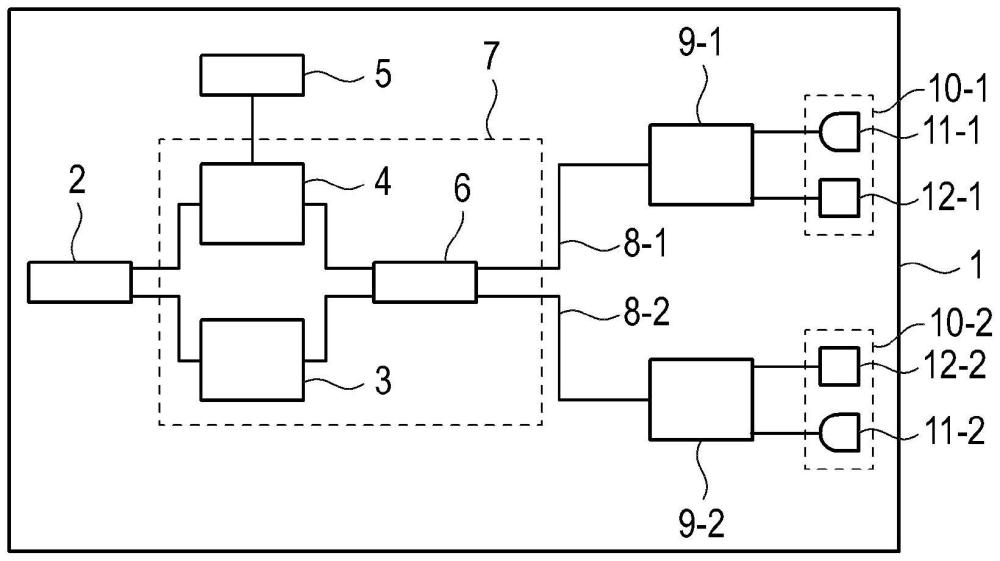
本发明涉及一种用于将光分布投影到车辆的周围环境中的方法。此外,本发明涉及一种用于将光分布投影到车辆的周围环境中的装置,带有构造用于获取车辆的运动数据和/或车辆在第一时刻的周围环境数据的传感器单元、用于存储额定光分布的存储器、用于由所存储的额定光分布产生投影数据的计算单元和构造用于将光分布投影到车辆的周围环境中的光投影器。
背景技术:
1、如下是已知的,将为图形的光分布投影到车辆的周围环境中。在这样的光图形的投影的情形中,车辆的行驶动态运动可被补偿,以便于在任何时候确保这些光图形与周围环境、尤其投影面的在透视上正确且精确的叠加。该补偿应以非常高的图像刷新率(频率)在较少拖延(延迟)中实现。光图形通常在带有图形处理器的硬件渲染系统中计算。然而,该实现方案由于带有图形处理器的硬件渲染系统的使用是成本密集的。此外,在该情况中用于将图像数据传递到光控制器处的数据基础设施须被设计用于非常高的带宽和非常高的传输速率。例如,在该情况中使用用于高速数据传输(lvds,低压差分信号)的导线,其增加了系统的成本。
2、例如,由de 10 2019 217 978 a1已知一种用于借助于车辆的光分布系统投影光分布的方法,在其中车辆的由传感器单元所确定的位置数据被用于校正用于光投影器的投影数据。
技术实现思路
1、本发明基于如下任务,即,提供一种方法和装置,在其中投影的光分布与期望的额定光分布完全不发生偏差或发生较少偏差。
2、根据本发明,该任务通过一种根据本发明的方法和一种根据本发明的装置来解决。
3、在根据本发明的方法的情形中,在第一时刻获取车辆的运动数据和/或车辆的周围环境数据。由经获取的运动数据和/或经获取的周围环境数据计算出对于之后的第二时刻而言的经预测位置数据。由所存储的额定光分布产生用于光投影器的投影数据。所产生的投影数据借助于经预测位置数据来校正,从而产生经校正的投影数据。最后,光投影器在第二时刻基于经校正的投影数据将光分布投影到车辆的周围环境中。
4、经投影的光分布或光分布的投影此处被理解为光在投影面上或在三维空间中的分布的形式和方式。光分布因此尤其是用于车道的适宜的照亮的大灯光的分布,以便于改善驾驶员的能见度,然而避免反向交通的眩光。在此,不同亮度和颜色的用于将图形、尤其符号图示、例如导向线、箭头、斑马线、符号示出在车道上、在其它投影面上或在三维空间中的光的分布同样被包含到该光分布中。在此,额定光分布是以适宜的数据格式被存储的期望的光分布。在此,额定光分布、尤其所包含的光图形可取决于车道走向和交通情况变化。
5、根据本发明如下被识别出,即,经投影的光分布与期望的额定光分布的偏差此外通过以下来产生,即,用于校正投影数据的车辆的所使用的位置数据在发光时刻不再是最新的。对此而言的原因在于在位置数据的获取与通过光投影器的发光之间的延迟。该延迟也可被称为运动光子延迟(motion-to-photon-latency)。因此,利用根据本发明的方法有利地实现经投影的光分布对车辆的变化的定向(也就是说姿势)的更好的适配。车辆定向的变化可例如由于平移或旋转运动(例如俯仰、滚动和偏航运动)实现。在车辆的运动的情形中,尤其平移和旋转的运动叠加。
6、车辆的位置数据尤其包括车辆的定向相对于标准定向或者车辆的标准位置或标准姿态的偏差。车辆的标准定向尤其是车辆在平坦的水平定向的车道上的定向,其中,车辆的纵轴平行于车辆的行驶方向定向。位置数据尤其说明了车辆相对于标准定向的扭转。其可例如包含标准定向鉴于纵轴(x轴)、横轴(y轴)和/或垂直轴(z轴)的角度偏差。
7、周围环境数据尤其包括相对在行驶方向上的车道走向的信息。尤其,车道的几何变化被考虑,其导致车辆的位置变化、尤其车辆的扭转。车道的这样的几何变化例如是车道的倾斜或车道走向的变化,这引起在车道行驶的情形中作用到车辆上的力。这些力尤其引起车辆围绕三个车轴的扭转。
8、在根据本发明的方法的情形中,这些周围环境数据可被用于计算车辆的经预测位置数据。其因此预测车辆的定向如何变化,当车辆驶过借助于周围环境数据所获取的车道走向时。在考虑车辆的当前和/或未来的速度的情形下,经预测位置数据对于之后的第二时刻而言在考虑这些周围环境数据的情形下计算出。
9、按照根据本发明的方法的一种设计方案,第二时刻是光分布以借助于在第一时刻被获取的运动数据和/或周围环境数据计算出的经校正的那些投影数据被投影的时刻。有利地,在计算经校正的投影数据的情形中,在运动数据和/或周围环境数据的获取与光分布的投影之间的延迟被考虑。
10、按照根据本发明的方法的另一设计方案,在计算经预测位置数据的情形中计算出车辆在第二时刻的位置。由车辆的位置,可尤其在考虑车道的几何形状的情形下确定车辆在光分布被投影的第二时刻的定向。有利地,由此可减少在期望的额定光分布与经投影的光分布之间的可能的偏差。
11、有利地,此外车辆的已在第一时刻在获取运动数据的情形中经获取的扭转被额外地获取且在计算经预测位置数据的情形中被考虑。因此,车辆在第一时刻的定向同样被获取。
12、如果例如借助于周围环境数据识别出车道的倾斜度增加,则预测围绕车辆的横轴的俯仰运动。第二时刻可以根据车辆的速度和获取运动数据与光分布投影之间的延迟来计算。此外,车辆在车道上的位置可以在该第二时刻计算出。通过这种方式,在考虑到在该第二时刻的俯仰运动的情况下可以计算出车辆在该位置的情形中的定向。通过这种方式,可以计算出预测位置数据。
13、按照根据本发明的方法的一种设计方案,由周围环境数据此外确定相对交通情况的数据。由这些相对经获取的交通情况的数据可基于即将来临的驾驶操作计算出车辆的定向、也就是说方位的变化。在计算预测位置数据的情形中,根据该设计方案此外考虑车辆的定向由于经预测的驾驶操作的变化。
14、例如,车辆的即将来临的制动或正加速引起车辆的俯仰运动。这样的即将来临的加速可被预测,以便于计算出对于第二时刻而言的经预测的位置数据。此外,即将来临的规避操作可能引起车辆的侧倾运动。借助于周围环境数据,这样的操作可被预测且在计算预测位置数据的情形中被考虑。
15、按照根据本发明的方法的一种设计方案,由预测位置数据计算出光投影器的经预测的指向且投影数据借助于光投影器的经预测的指向来校正。车辆定向的变化直接影响光投影器的指向,因为其被牢固地固定在车辆中。根据本发明,因此车辆的位置数据可被换算为光投影器的指向。因此,车辆的预测位置数据同样可被换算为光投影器的经预测的指向。该经预测的指向然后可在投影数据的校正的情形中被考虑。
16、按照根据本发明的方法的另一设计方案,对于车辆而言的运动数据借助于底盘传感器和/或惯性传感器来计算。有利地,由此可在第一时刻获得特别精确的运动数据。
17、按照根据本发明的方法的改进方案,运动数据和/或周围环境数据以第一频率来获得且经校正的投影数据以第二频率来产生,其中,第一频率大于第二频率。直至为了产生经校正的投影数据,在该改进方案的情形中在处在第一与第二时刻之间的中间时刻获取车辆的更新的运动数据和/或车辆的更新的周围环境数据。由更新的运动数据和/或更新的周围环境数据然后计算出对于之后的第二时刻而言的更新的预测位置数据。由更新的预测位置数据与预测位置数据的偏差然后计算出对于投影数据而言的校正参数。在投影光分布之前,然后由经校正的投影数据和校正参数计算出更新的经校正的投影数据。光投影器然后在第二时刻基于更新的经校正的投影数据将光分布投影到车辆的周围环境中。通过预测位置数据的更新,在第一与第二时刻之间的时间间隔尤其不被改变,从而有利地可考虑车辆运动紧邻在光分布的投影之前的变化。
18、有利地,在该改进方案的情形中由额定光分布初始获得的投影数据以双重方式被校正:一方面,车辆定向在第二时刻借助于预测位置数据的预测被用于投影数据的校正。另一方面如下被充分利用,即,运动数据相比经校正的投影数据可更频繁地获取地产生。当经校正的投影数据被产生时,已存在相比在投影数据的校正的情形中被考虑的运动数据更新的运动数据。同样的适用于周围环境数据。对于更新的运动数据和/或更新的周围环境数据而言可非常快速地计算出对于第二时刻而言对于车辆的更新的预测位置数据。这些更新的预测位置数据与在投影数据的校正的情形中被使用的预测位置数据的偏差引起校正参数。用于计算经校正的投影数据的时间间隔长于用于获取运动数据和/或周围环境数据的时间间隔,因为投影数据由额定光分布的产生是计算密集的。校正参数到已经经校正的投影数据上的应用然而可在非常短的时间间隔内实现,从而使得经校正的投影数据借助于校正参数在光分布的投影之前可被再次更新。由此,经投影的光分布与期望的额定光分布的偏差还可被进一步降低。
19、运动数据或者周围环境数据以其被获得的第一频率可尤其与在车辆中的实时数据获取相符。校正参数可尤其引起光分布的移动。其尤其是在车辆的最后的与当前的定向的情形中的光投影之间的平均垂直图像移动。这样的图像移动可以以最小的计算成本通过对已存在的经校正的投影数据的简单的存储器访问实现以用于产生更新的经校正的投影数据。例如,存储器访问可在从校正参数推导出的存储器地址处相对于已经存在的经校正的投影数据实现。在此,校正参数的应用尤其紧邻在光分布的投影之前实现,其中,尤其仅应用光分布的垂直移动。
20、按照根据本发明的方法的另一设计方案,经校正的投影数据经由数据线被传递到光投影器的光控制器处。在经校正的投影数据的投影之前,校正参数然后被传递到光控制器处。光控制器然后计算出更新的经校正的投影数据且基于更新的经校正的投影数据操控光投影器。有利地,在该情况中投影数据的产生、也就是说渲染和由此获得的投影数据的更新被局部彼此分开。为了更新经校正的投影数据,因此仅校正参数须经由数据线被传递,而不是更新的经校正的投影数据;后者在光控制器中被计算。有利地,由此得出光投影器的刷新率的提高,而数据线的带宽无须被提高。此外得出延迟到例如几毫秒的降低,因为已经被校正的投影数据紧邻在投影之前才被再次更新。
21、按照根据本发明的方法的一种改进方案,除了由光投影器所投影的光分布之外,基本光功能借助于大灯模块被产生,其叠加于被投影的光分布。有利地,由此光分布可被投影到基本光功能中,从而使得经投影的光分布对于驾驶员和/或其他交通参与者而言可被更好地感知。基本光功能可例如是近光灯、远光灯、遮蔽的连续远光灯或大灯的另一种光分布,在车辆的行驶方向上为了驾驶员的更好的能见度应以其照亮车道。
22、基本光功能可通过对于车辆而言的预测位置数据来校正。在该情况中,经校正的基本光功能借助于预测位置数据来产生。备选地,基本光功能同样可通过在第一时刻所采集的位置数据,而不通过预测位置数据来校正。这是有利的,因为用于产生经校正的基本光功能的延迟时间在该情况中较少。备选地,基本光功能保持独立于车辆的经获取的位置数据和/或运动数据。在该情况中,仅对于光投影器而言的投影数据基于预测位置数据被校正。
23、按照根据本发明的方法的一种改进方案,对于基本光功能而言借助于校正参数计算出经校正的基本光功能,且大灯模块在第二时刻发射经校正的基本光功能。由此,不仅经投影的光分布而且基本光功能可以以简单的方式在不带有较长延迟的情况下被校正。借助于校正参数的计算可以以与更新的经校正的投影数据的计算相同的方式实现。如下然而备选地是可能的,即,经校正的基本光功能的计算借助于校正参数以不同于在投影数据的情形中的方式实现。由投影数据所产生的光分布可例如被移动以不同于基本光功能的值,尤其可实现另一垂直移动。
24、预测位置数据尤其包括车辆围绕横轴在之后的第二时刻的预测摆动角度。因此有利地车辆的俯仰运动被获取且对于第二时刻而言的俯仰角被预测,以便于校正投影数据。这是尤其有利的,当车辆越过突起或隆起时或当车辆的负的或正的加速被预测时,因为这引起车辆的俯仰运动。
25、光分布的投影可在三维空间中实现。其在该情况中例如在较高湿度或雾的情形中是可见的。尤其,该投影然而实现到面上、例如到车道上、尤其到在车辆的行驶方向上的车道的部分上。
26、按照根据本发明的方法的一种设计方案,光分布应被投影到其上的投影面的定向被获取。在产生经校正的投影数据的情形中,在该情况中由额定光分布实现投影数据的透视畸变,以便于将额定光分布不失真地投影到投影面上。
27、额定光分布借助于光投影器兼容的投影数据来存储,其中,在额定光分布的情形中从如下出发,即,车辆处在标准定向上且实现到标准面上的光投影,例如到在车辆之前的平整的水平面上。如果投影面的几何形状不同于标准投影面,例如投影面总体上不同地定向或投影面具有弯曲,从而使得投影面的不同区域不同地定向,则该定向在产生投影数据的情形中须被考虑,从而被投影到投影面上的光分布对于观察者而言如同期望的额定光分布那样显现。根据本发明,这通过投影数据的透视畸变来实现。透视畸变可例如非常高效地作为扫描过程被计算出。该计算在该情况中相比投影数据的三维渲染尤其更高效。
28、在根据本发明的方法的情形中,以该方式所产生的投影数据然而被再次校正,当车辆相对于投影面的方位与标准定向或者标准位置偏差时。车辆的位置数据和光投影器的指向的考虑是本身已知的。然而在根据本发明的方法的情形中,投影数据借助于预测位置数据来校正,其在光分布的实际投影的时刻考虑车辆的且进而光投影器的预计方位。有利地,由此实现期望的额定光分布到投影面上的非常精确的投影。
29、先前所描述的根据本发明的用于将光分布投影到车辆的周围环境中的装置的特征在于如下,即,其具有与传感器单元相联接的预测单元,该预测单元构造用于由经获取的运动数据和/或经获取的周围环境数据计算出对于之后的第二时刻而言的预测位置数据。此外,该装置具有与计算单元和预测单元相联接的校正单元,其构造用于借助于预测位置数据校正所产生的投影数据,从而产生经校正的投影数据。在根据本发明的装置的情形中,光投影器构造用于在第二时刻基于经校正的投影数据将光分布投影到车辆的周围环境中。
30、根据本发明的装置尤其构造用于实施根据本发明的方法。因此其具有相同的优点。
31、传感器单元在一种实施方案中构造成惯性测量单元。惯性测量单元由多个惯性传感器组成,例如加速度传感器和角速度传感器,其共同形成惯性导航系统。
32、备选地或额外地,传感器单元可包括光学摄像头系统、例如飞行时间相机、立体相机、动态视觉传感器或神经形态传感器。由光学摄像头系统所确定的数据可借助于算法有利地计算出车辆的运动。
33、备选地或额外地,传感器单元同样可包括车辆的速度表。
34、备选地或额外地,传感器单元可包括投影器-摄像头-系统,其借助于图案投影产生周围环境的动态3d模型。由动态3d模型可推导出车辆的相对方位、其自身运动和车道的几何形状,从而可有利地计算出车辆的预测位置数据、车道在第二时刻的几何形状和/或投影面的几何形状。
35、此外,多个传感器单元、例如惯性传感器和摄像头系统可与车辆数据、例如速度和转向角被一起结合。
36、按照根据本发明的装置的一种改进方案,校正单元构造用于以第二频率产生投影数据,且传感器单元构造用于以第一频率获得运动数据,其中,第一频率大于第二频率。此外,传感器单元构造用于直至为了产生校正的投影数据在处在第一与第二时刻之间的中间时刻获取车辆的更新的运动数据和/或车辆的更新的周围环境数据。预测单元然后构造用于由更新的运动数据和/或更新的周围环境数据计算出对于之后的第二时刻而言的更新的预测位置数据。在该设计方案的情形中,校正单元构造用于由更新的预测位置数据与预测位置数据的偏差计算出对于投影数据而言的校正参数。在投影光分布之前,然后可由经校正的投影数据和校正参数计算出更新的经校正的投影数据。在该情况中,光投影器构造用于在第二时刻基于更新的经校正的投影数据将光分布投影到车辆的周围环境中。
37、有利地,在该设计方案的情形中可经由校正参数实现进一步的校正,其中,不同的频率在获取运动数据或周围环境数据的情形中且为了产生投影数据被充分利用,以便于再次借助于校正参数更新经校正的投影数据。以该方式可实现额定光分布到车辆的周围环境中的更精确的投影。
38、按照根据本发明的装置的一种改进方案,在光投影器的情形中布置有光控制器,其构造用于操控光投影器的一个或多个光源。预测单元、计算单元和校正单元可尤其布置在中央控制单元中,其经由数据线与光控制器相联接。光控制器然后构造用于计算出更新的经校正的投影数据且传递到光投影器的一个或多个光源处。由此有利地实现如下,即,数据线的带宽由于更新的经校正的投影数据的传递无须被提高,因为除了已经被传递的经校正的投影数据以外仅校正参数被传递,其然后在光控制器中被应用到经校正的投影数据上,以便于产生更新的经校正的投影数据。由此此外可减少系统延迟,因为更新的经校正的投影数据紧邻在这些投影数据到光源处的传递之前被计算出。
39、此外,本发明涉及一种带有两个相应地包括大灯模块和上述装置的大灯单元的车辆。大灯模块尤其构造用于产生基本光功能、例如近光灯和远光灯或大灯的其它功能。大灯模块可以是led模块、高分辨率的微像素模块或所谓的dmd(数字微镜设备)模块。
40、如上面所说明的那样,基本光功能同样可被校正,更确切地说类似于经投影的光分布或独立于经投影的光分布。此外,经投影的光分布同样可在静态基本光功能内被改变,从而使得基本光功能不被改变。
41、借助于高分辨率像素大灯不仅同样可产生基本光功能而且可产生经投影的光分布。在此,经投影的光分布可与基本光功能分开地被产生且只有在光控制器中然后经投影的光分布才可叠加于高分辨率的基本光功能。
42、按照根据本发明的车辆的一种设计方案,大灯单元在横向上彼此间隔地布置,且两个大灯单元的光投影器构造用于通过两个光投影器的光发射的叠加产生经投影的光分布。在该情况中如下通过投影数据的校正是可能的,即,叠加两个光投影器的经投影的光分布,从而不得出双重图像。
本文地址:https://www.jishuxx.com/zhuanli/20240718/252952.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表