煤矿用自移式设备列车的控制方法和装置与流程
- 国知局
- 2024-08-02 17:03:53
本申请涉及煤矿用车辆的控制,具体而言,涉及一种煤矿用自移式设备列车的控制方法、装置、计算机可读存储介质和煤矿用自移式设备列车系统。
背景技术:
1、煤矿用自移式设备列车是用来运输煤炭或其他物料的车辆,煤矿用自移式设备列车包括依次连接的支撑牵引车、牵引绞车、设备列车和电缆车,溜车是指在牵引绞车行驶过程中,牵引绞车、设备列车和电缆车突然失控滑行的现象,这可能会导致事故发生。在煤矿中,由于牵引车运输的物料重量较大,一旦发生事故可能会造成严重后果,因此进行溜车监测和紧急制动是非常重要的安全措施。
2、目前的紧急制动系统通常是基于驾驶员的手动操作或基于预设的触发条件来实现的,例如添加阻挡块来降低煤矿用自移式设备列车的速度,缺乏对危险情况的准确预测能力。
3、即现有方案对于煤矿用自移式设备列车在行驶过程中的防溜车的处理方式的智能化较低。
技术实现思路
1、本申请的主要目的在于提供一种煤矿用自移式设备列车的控制方法、装置、计算机可读存储介质和煤矿用自移式设备列车系统,以至少解决现有方案对于煤矿用自移式设备列车在行驶过程中的防溜车的处理方式的智能化较低的问题。
2、为了实现上述目的,根据本申请的一个方面,提供了一种煤矿用自移式设备列车的控制方法,该方法包括:
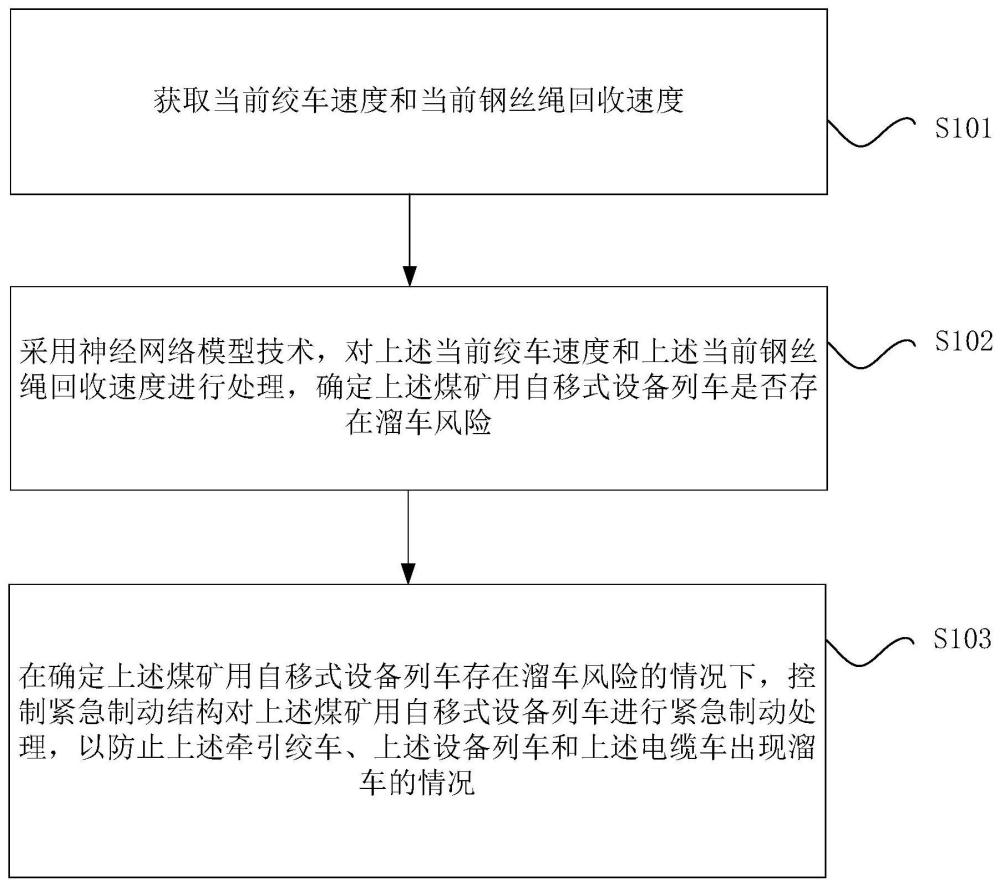
3、获取当前绞车速度和当前钢丝绳回收速度,所述煤矿用自移式设备列车包括依次连接的支撑牵引车、牵引绞车、设备列车和电缆车,所述当前绞车速度为所述牵引绞车在当前时刻的速度,所述当前钢丝绳回收速度为所述牵引绞车的钢丝绳在当前时刻的回收速度;
4、采用神经网络模型技术,对所述当前绞车速度和所述当前钢丝绳回收速度进行处理,确定所述煤矿用自移式设备列车是否存在溜车风险;
5、在确定所述煤矿用自移式设备列车存在溜车风险的情况下,控制紧急制动结构对所述煤矿用自移式设备列车进行紧急制动处理,以防止所述牵引绞车、所述设备列车和所述电缆车出现溜车的情况。
6、可选地,采用神经网络模型技术,对所述当前绞车速度和所述当前钢丝绳回收速度进行处理,确定所述煤矿用自移式设备列车是否存在溜车风险,包括:将所述当前绞车速度和所述当前钢丝绳回收速度作为溜车风险神经网络模型的输入,以使得所述溜车风险神经网络模型对所述当前绞车速度和所述当前钢丝绳回收速度进行处理,其中,所述溜车风险神经网络模型是使用多组第一训练数据训练得到的,所述多组第一训练数据中的每一组第一训练数据均包括历史时间段内获取的:绞车速度、钢丝绳回收速度以及与所述绞车速度和钢丝绳回收速度对应的风险预测结果,所述风险预测结果表征所述煤矿用自移式设备列车存在溜车风险,或者所述煤矿用自移式设备列车不存在溜车风险;获取所述溜车风险神经网络模型的输出,并根据所述溜车风险神经网络模型的输出确定所述煤矿用自移式设备列车是否存在溜车风险。
7、可选地,采用神经网络模型技术,对所述当前绞车速度和所述当前钢丝绳回收速度进行处理,确定所述煤矿用自移式设备列车是否存在溜车风险,包括:获取激光雷达采集的多帧前方底板点云图像,所述前方底板点云图像为所述煤矿用自移式设备列车的前方路径巷道底板的点云图像;采用点云拼接技术,对所有的所述前方底板点云图像进行拼接处理,得到前方底板3d模型,并基于所述前方底板3d模型确定前方底板坡度,所述前方底板坡度为所述煤矿用自移式设备列车的前方路径巷道底板的坡度;至少根据所述前方底板坡度,调节所述牵引绞车的驱动电机的扭矩,并采用神经网络模型技术,对所述当前绞车速度和所述当前钢丝绳回收速度进行处理,确定所述煤矿用自移式设备列车是否存在溜车风险。
8、可选地,至少根据所述前方底板坡度,调节所述牵引绞车的驱动电机的扭矩,包括:将所述前方底板坡度作为电机扭矩神经网络模型的输入,以使得所述电机扭矩神经网络模型对所述前方底板坡度进行处理,其中,所述电机扭矩神经网络模型是使用多组第二训练数据训练得到的,所述多组第二训练数据中的每一组第二训练数据均包括历史时间段内获取的:坡度以及与所述坡度对应的电机扭矩;获取所述电机扭矩神经网络模型的输出,并确定第一目标电机扭矩为所述电机扭矩神经网络模型的输出;采用所述第一目标电机扭矩,调节所述牵引绞车的驱动电机的扭矩。
9、可选地,至少根据所述前方底板坡度,调节所述牵引绞车的驱动电机的扭矩,包括:根据所述当前绞车速度和所述前方底板坡度,确定第二目标电机扭矩,所述第二目标电机扭矩是与所述当前绞车速度和所述前方底板坡度对应的电机扭矩;采用所述第二目标电机扭矩调节所述牵引绞车的驱动电机的扭矩。
10、可选地,所述方法还包括:在确定所述煤矿用自移式设备列车不存在溜车风险的情况下,生成提示信息,以提示所述煤矿用自移式设备列车不存在溜车风险。
11、可选地,所述方法还包括:在确定所述煤矿用自移式设备列车存在溜车风险的情况下,生成报警信息,并控制报警闪烁灯进行闪烁,以提示所述煤矿用自移式设备列车存在溜车风险。
12、根据本申请的另一方面,提供了一种煤矿用自移式设备列车的控制装置,该装置包括:
13、获取单元,用于获取当前绞车速度和当前钢丝绳回收速度,所述煤矿用自移式设备列车包括依次连接的支撑牵引车、牵引绞车、设备列车和电缆车,所述当前绞车速度为所述牵引绞车在当前时刻的速度,所述当前钢丝绳回收速度为所述牵引绞车的钢丝绳在当前时刻的回收速度;
14、确定单元,用于采用神经网络模型技术,对所述当前绞车速度和所述当前钢丝绳回收速度进行处理,确定所述煤矿用自移式设备列车是否存在溜车风险;
15、第一处理单元,用于在确定所述煤矿用自移式设备列车存在溜车风险的情况下,控制紧急制动结构对所述煤矿用自移式设备列车进行紧急制动处理,以防止所述牵引绞车、所述设备列车和所述电缆车出现溜车的情况。
16、根据本申请的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行任意一种所述的煤矿用自移式设备列车的控制方法。
17、根据本申请的另一方面,提供了一种煤矿用自移式设备列车系统,该系统包括:煤矿用自移式设备列车和控制器,所述控制器与所述煤矿用自移式设备列车之间进行通信,所述控制器包括用于执行任意一种所述的煤矿用自移式设备列车的控制方法。
18、应用本申请的技术方案,通过考虑当前绞车速度和当前钢丝绳回收速度,同时采用神经网络模型技术,得以实时精确判断牵引绞车、设备列车和电缆车是否会有溜车的风险,并在确定煤矿用自移式设备列车存在溜车风险的情况下,控制紧急制动结构对煤矿用自移式设备列车进行紧急制动处理,以防止牵引绞车、设备列车和电缆车出现溜车的情况,相比现有方案更加智能化,从而解决了现有方案对于煤矿用自移式设备列车在行驶过程中的防溜车的处理方式的智能化较低的问题。
技术特征:1.一种煤矿用自移式设备列车的控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,采用神经网络模型技术,对所述当前绞车速度和所述当前钢丝绳回收速度进行处理,确定所述煤矿用自移式设备列车是否存在溜车风险,包括:
3.根据权利要求1所述的方法,其特征在于,采用神经网络模型技术,对所述当前绞车速度和所述当前钢丝绳回收速度进行处理,确定所述煤矿用自移式设备列车是否存在溜车风险,包括:
4.根据权利要求3所述的方法,其特征在于,至少根据所述前方底板坡度,调节所述牵引绞车的驱动电机的扭矩,包括:
5.根据权利要求3所述的方法,其特征在于,至少根据所述前方底板坡度,调节所述牵引绞车的驱动电机的扭矩,包括:
6.根据权利要求1至5中任一项所述的方法,其特征在于,所述方法还包括:
7.根据权利要求1至5中任一项所述的方法,其特征在于,所述方法还包括:
8.一种煤矿用自移式设备列车的控制装置,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行权利要求1至7中任意一项所述的煤矿用自移式设备列车的控制方法。
10.一种煤矿用自移式设备列车系统,其特征在于,包括:煤矿用自移式设备列车和控制器,所述控制器与所述煤矿用自移式设备列车之间进行通信,所述控制器包括用于执行权利要求1至7中任意一项所述的煤矿用自移式设备列车的控制方法。
技术总结本申请提供了一种煤矿用自移式设备列车的控制方法和装置,该方法通过考虑当前绞车速度和当前钢丝绳回收速度,同时采用神经网络模型技术,得以实时精确判断牵引绞车、设备列车和电缆车是否会有溜车的风险,并在确定煤矿用自移式设备列车存在溜车风险的情况下,控制紧急制动结构对煤矿用自移式设备列车进行紧急制动处理,以防止牵引绞车、设备列车和电缆车出现溜车的情况,相比现有方案更加智能化,从而解决了现有方案对于煤矿用自移式设备列车在行驶过程中的防溜车的处理方式的智能化较低的问题。技术研发人员:魏子良,乔永军,张云飞,王志强,罗宇,闫慧,金城,张建铭,刘混田,郭爱军,李铮,戴卫东受保护的技术使用者:国能神东煤炭集团有限责任公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240718/253819.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表