一种危险场景安全驾驶决策获取方法
- 国知局
- 2024-08-02 17:08:45
本发明涉及智能自动驾驶车辆与安全驾驶辅助领域,尤其是涉及一种危险场景安全驾驶决策获取方法。
背景技术:
1、道路交通事故成为威胁人们生命财产安全的重要因素,每年因道路交通事故造成死亡的人数占意外死亡总数的50%以上,对国家造成严重的损失。驾驶任务、驾驶环境和驾驶能力耦合失调导致道路交通事故的发生,其中驾驶任务和驾驶环境的复杂度受不良天气、不良道路因素和周围复杂驾驶环境的影响,驾驶能力受人类生理和物理客观限制对驾驶环境的感知和驾驶信息的处理存在一定限制。例如,在雨雾、冰雪等不良天气环境直接降低驾驶员能见度,也影响驾驶员对周围车辆车距、车速的判断,同时,路面温湿度变化影响路面擦系数导致制动距离的变化。在这些复杂驾驶场景下驾驶员对环境信息的感知精度降低,基于带有偏差甚至错误的环境信息,难以避免产生错误的驾驶决策,从而导致交通事故的发生。
2、为了提升驾驶安全、降低危险驾驶场景的事故率,现有高性能车辆安装驾驶安全辅助系统,指引、帮助驾驶员完成复杂驾驶任务。然而,目前最为有效的驾驶辅助系统,仅从车辆动力学和浅层次的驾驶安全角度来评估驾驶风险,制定驾驶决策。鲜有系统综合不良天气环境下路面摩擦系数、能见度、道路线形和周围复杂交互环境要素,然而,高精度的驾驶辅助系统需综合考虑这些要素的共同影响,进而为驾驶员提供更加精确的驾驶辅助决策。因此,如何针对不良驾驶场景下进行更为精确及时的驾驶安全辅助仍是目前亟待解决的问题。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种危险场景安全驾驶决策获取方法,该方法针对不良气象、道路环境和复杂交通场景下因驾驶员感知精度不足而导致交通事故的问题,融合计算机视觉、道路工程、交通安全等多领域方法,能够进行实时驾驶行为预警,并提供与相应危险交通场景更匹配的驾驶决策。
2、本发明的目的可以通过以下技术方案来实现:
3、本发明提供一种危险场景安全驾驶决策获取方法,包括以下步骤:
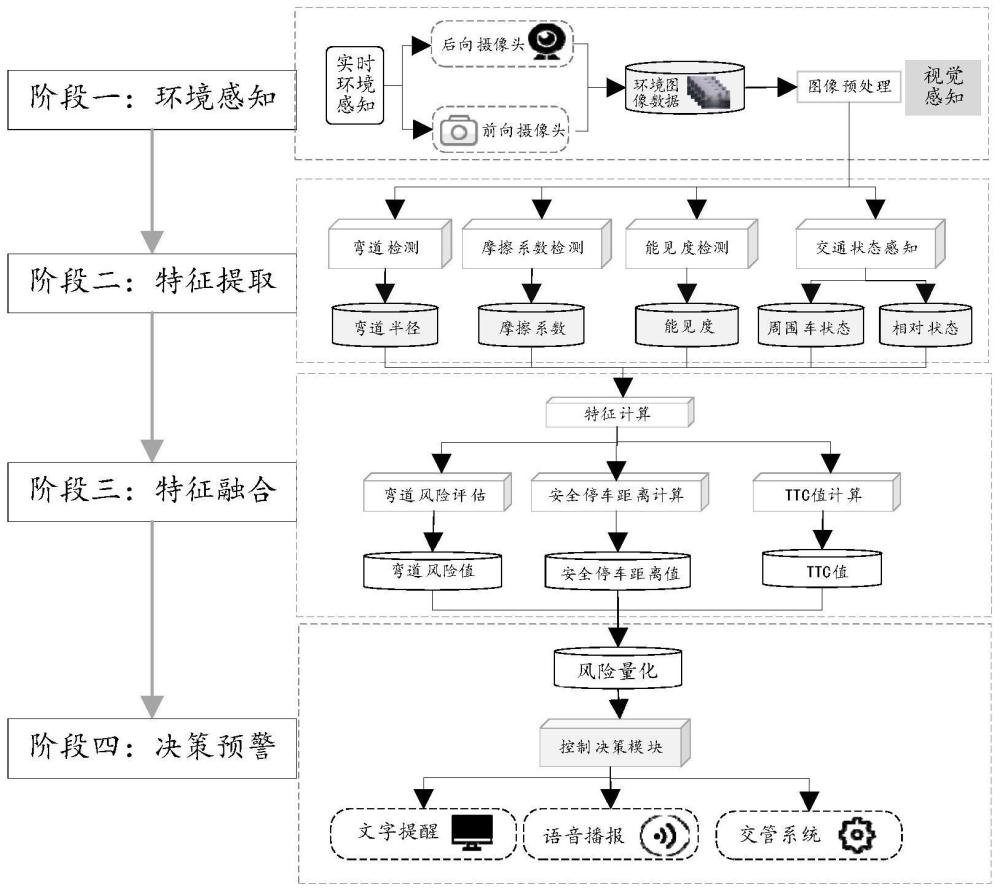
4、环境感知步骤,实时获取环境图像数据以及车辆状态数据;
5、特征提取步骤,基于所述环境图像数据和所述车辆状态数据,利用弯道检测方法、摩擦系数检测方法、能见度检测方法以及车距车速检测方法,分别提取相应的弯道半径、路面摩擦系数、车辆能见度以及周围车辆运动状态,并获取车辆与其周围车辆的相对运动状态;
6、特征融合步骤,对所述弯道半径、所述路面摩擦系数、所述车辆能见度、所述周围车辆运动状态和所述相对运动状态进行融合计算,获取安全限速值、弯道风险值、安全停车距离值和距离碰撞时间值;
7、决策预警步骤,基于所述弯道风险值、所述安全停车距离值和所述距离碰撞时间值量化驾驶风险,根据量化后的驾驶风险和所述安全限速值进行安全预警,提供最终的驾驶决策。
8、作为优选的技术方案,基于所述弯道检测方法提取所述弯道半径的过程,具体包括:
9、获取所述环境图像数据中的道路图像数据;
10、对所述道路图像数据进行预处理,所述预处理的过程包括灰度化、图像滤波和特征增强;
11、利用sobel算子从预处理后的道路图像数据中拟合车道线;
12、基于所述车道线计算弯道半径。
13、作为优选的技术方案,基于所述摩擦系数检测方法提取所述路面摩擦系数的过程,具体包括:
14、获取所述环境图像数据中的路面图像数据;
15、对所述路面图像数据进行预处理;利用提前训练好的残差网络对预处理后的路面图像数据进行检测,得到相应路面摩擦系数;
16、其中,所述残差网络的训练过程包括:
17、通过路面摩擦系数检测实验,获取实验道路路面摩擦系数图像数据集;
18、使用深度卷积生成对抗网络对路面图像数据集进行增强;
19、使用增强后的路面图像数据集训练从残差网络检测的路面摩擦系数,并将训练好的检测模型部署到车端;
20、利用残差网络学习当前的路面图像数据集,获取训练好的摩擦系数检测权值文件,将所述权值文件载入所述残差网络,得到所述训练好的残差网络。
21、作为优选的技术方案,所述能见度检测方法包括:白天大雾天气能见度检测和夜间能见度检测,所述夜间能见度检测过程包括:获取夜间光源图像,依次对所述夜间光源图像进行自适应阈值分割、形态学运算处理、光源区域定位后,获取当前图像的灰度总值,根据所述灰度总值计算当前能见度。
22、作为优选的技术方案,基于所述车距车速检测方法提取所述周围车辆运动状态的过程,具体包括:
23、对所述环境图像数据进行预处理;
24、利用目标检测与追踪算法提取所述周围车辆运动状态;
25、基于所述周围车辆运动状态和所述车辆状态数据,计算所述目标车辆与其周围车辆的相对距离、相对速度和方向夹角。
26、作为优选的技术方案,所述安全限速值利用所述弯道半径、所述路面摩擦系数、所述能见度和所述周围车辆运动状态共同确定。
27、作为优选的技术方案,所述安全停车距离值利用所述路面摩擦系数和所述能见度共同确定。
28、作为优选的技术方案,所述距离碰撞时间值利用所述车辆状态数据和所述相对运动状态共同确定。
29、作为优选的技术方案,所述弯道风险值利用所述弯道半径、所述路面摩擦系数和所述车辆状态数据共同确定。
30、作为优选的技术方案,根据量化后的驾驶风险和所述安全限速值进行安全预警的过程,具体包括:
31、根据所述距离碰撞时间值与预设的安全阈值的比较结果,将驾驶风险划分为短距离风险和非短距离风险;
32、当所述驾驶风险为短距离风险时,发送紧急制动驾驶策略;
33、当所述驾驶风险为非短距离风险时,根据所述弯道半径,判断目标车辆是否处于弯道路段:若为是,则目标车辆处于弯道风险,发送弯道驾驶策略;若为否,则目标车辆处于长距离风险,发送安全停车距离保持驾驶策略;
34、根据当前的驾驶策略,结合所述安全限速值进行安全预警,提供最终的驾驶决策。
35、与现有技术相比,本发明具有以下有益效果:
36、1、本发明基于实时视觉感知,利用弯道检测方法、摩擦系数检测方法、能见度检测方法以及车距车速检测方法,分别提取相应的弯道半径、路面摩擦系数、车辆能见度以及周围车辆运动状态,经过融合计算得到安全限速值、弯道风险值、安全停车距离值和距离碰撞时间值,最后利用安全限速与ttc(time to collision)防碰撞预警融合决策,从而向机动车驾驶员提供当前驾驶环境下实时、准确的驾驶决策,能够有效提升驾驶辅助系统在不良天气环境下的感知精度,提高驾驶决策的准确性;
37、2、本发明加入了弯道检测模块,即利用弯道监测方法提取弯道半径数据,能够快速识别转弯场景,基于弯道场景提出的预警方法能有效防止侧滑和翻车事故;
38、3、本发明在摩擦系数检测方面提出非接触式一阶检测方法,相比传统的从路面图像到水膜厚度再到雨量的方法,本方法能够直接完成实现路面图片与摩擦系数的映射,此外,采用基于dcgan网络(deep convolutional generative adversarial networks,深度卷积生成对抗网络)的路面图像数据增强方法,能够有效解决路面图像数据样本量小的问题;
39、4、本发明加入了对周围车辆的检测,也即利用车距车速检测方法提取周围车辆运动状态数据,将周围车辆信息融入车速预警系统,既满足长距离天气状况的需求,又融入近距离周围车的碰撞风险;
40、5、本发明采用的能见度检测方法,系采用基于暗通道先验法的白天能见度改进检测模型,以及基于图像特征处理的夜间能见度检测模型,并将二者进行融合,可以实时获取全天能见度,也即不仅能对白天大雾天气进行能见度检测,同时适用于光线暗弱的夜间场景,相比传统的暗通道方法,性能更好,场景适应性更强;
41、6、本发明所提供的方法可用于开发集成平台,在实际道路上进行测试。
本文地址:https://www.jishuxx.com/zhuanli/20240718/254359.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表