基于液压传动控制系统的无人驾驶多功能履带车的制作方法
- 国知局
- 2024-08-01 07:26:15
本发明涉及农机领域,具体为一种基于液压传动控制系统的无人驾驶多功能履带车。
背景技术:
1、农用履带车一般包括履带总成、安装于履带总成上的机架、安装于机架上的传动系统、安装于机架后端的悬挂总成以及驾驶总成,通过悬挂总成拖挂农机具。现有的农用履带车需要操作人员在驾驶总成上进行操作,无法实现无人驾驶。
技术实现思路
1、本发明的目的在于提供一种基于液压传动控制系统的无人驾驶多功能履带车,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种基于液压传动控制系统的无人驾驶多功能履带车,包括:
4、履带总成,所述履带总成包括左右两个履带机构,所述履带机构包括液压马达;
5、机架,所述机架设置于履带总成上;
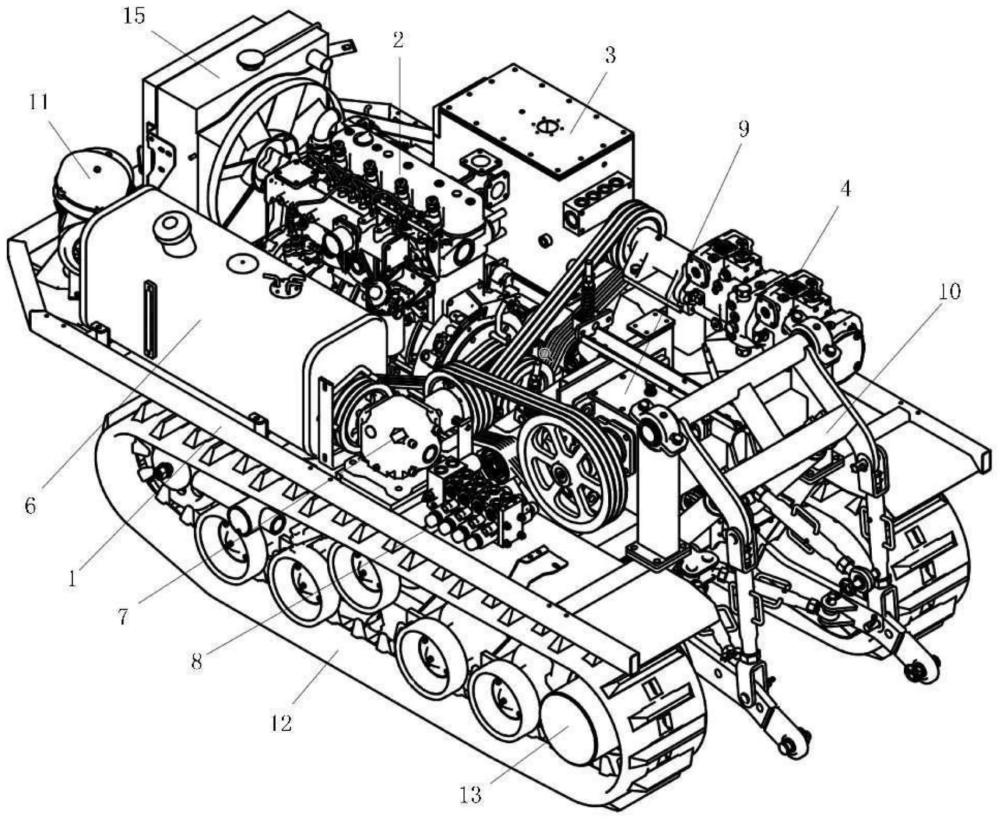
6、传动系统,所述传动系统设置于机架上,其包括发动机、液压油箱、液压泵、齿轮泵、换向齿轮箱、液压阀、后输出齿轮箱及悬挂总成,所述发动机的输出端分别与换向齿轮箱、液压泵、齿轮泵传动配合,所述换向齿轮箱与后输出齿轮箱传动配合,所述后输出齿轮箱用以对安装于悬挂总成上农机具进行驱动,所述液压泵从液压油箱抽送液压油至履带总成的液压马达,所述液压油箱、齿轮泵、液压阀、油冷却器与悬挂总成的油缸构成液压回路;以及
7、远程控制系统,所述远程控制系统包括控制单元、无线通讯单元,控制单元分别与无线通讯单元、发动机、液压阀电连接。
8、进一步地,所述液压泵有两台,两台液压泵分别通过管路与履带总成左右两侧的液压马达连接;
9、所述无人驾驶多功能履带车的转向控制方法包括:
10、a、直线前进,需满足以下情况:两台液压泵分别给两台液压马达正向供油且供油量相同;
11、b、直线倒退,需满足以下情况:两台液压泵分别给两台液压马达反向供油且供油量相同;
12、c、左转,需满足以下任意一种情况:
13、c1、左右两台液压马达均正向供油,但是右边液压马达的供油量大于左边液压马达的供油量;
14、c2、右边液压马达正向供油,左边液压马达停止供油;
15、c3、右边液压马达正向供油,左边液压马达反向供油;
16、c4、左右两台液压马达均反向供油,但是左边液压马达的供油量大于右边液压马达的供油量;
17、d、右转,需满足以下任意一种情况:
18、d1、左右两台液压马达均正向供油,但是左边液压马达的供油量大于右边液压马达的供油量;
19、d2、左边液压马达正向供油,右边液压马达停止供油;
20、d3、左边液压马达正向供油,右边液压马达反向供油;
21、d4、左右两台液压马达均反向供油,但是右边液压马达的供油量大于左边液压马达的供油量。
22、进一步地,所述c3中,当正向供油量和反向供油量相同时,履带总成原地左转。
23、进一步地,所述d3中,当正向供油量和反向供油量相同时,履带总成原地右转。
24、进一步地,所述传动系统还包括齿轮泵和液压阀,所述液压油箱、齿轮泵、液压阀、油缸依次通过管路连接。
25、进一步地,所述传动系统还包括油冷却器,所述液压阀、油冷却器和液压油箱依次通过管路连接。
26、进一步地,所述远程控制系统还包括定位单元,所述定位单元与控制单元电连接。
27、与现有技术相比,本发明的有益效果是:本发明的远程控制系统包括控制单元、无线通讯单元等结构,能够实现履带车的远程控制,配合传动系统能够实现履带车的无人驾驶,便于在丘陵、山区等复杂地形进行作业。
技术特征:1.一种基于液压传动控制系统的无人驾驶多功能履带车,其特征在于,包括:
2.根据权利要求1所述的一种基于液压传动控制系统的无人驾驶多功能履带车,其特征在于,所述液压泵(4)有两台,两台液压泵(4)分别通过管路与履带总成(12)左右两侧的液压马达(13)连接;
3.根据权利要求2所述的一种基于液压传动控制系统的无人驾驶多功能履带车,其特征在于,所述c3中,当正向供油量和反向供油量相同时,履带总成(12)原地左转。
4.根据权利要求2所述的一种基于液压传动控制系统的无人驾驶多功能履带车,其特征在于,所述d3中,当正向供油量和反向供油量相同时,履带总成(12)原地右转。
5.根据权利要求1所述的一种基于液压传动控制系统的无人驾驶多功能履带车,其特征在于,所述传动系统还包括齿轮泵(16)和液压阀(8),所述液压油箱(3)、齿轮泵(16)、液压阀(8)、油缸(14)依次通过管路连接。
6.根据权利要求5所述的一种基于液压传动控制系统的无人驾驶多功能履带车,其特征在于,所述传动系统还包括油冷却器(17),所述液压阀(8)、油冷却器(17)和液压油箱(3)依次通过管路连接。
7.根据权利要求1所述的一种基于液压传动控制系统的无人驾驶多功能履带车,其特征在于,所述远程控制系统还包括定位单元(18),所述定位单元(18)与控制单元(19)电连接。
技术总结本发明属于农机领域,公开了一种基于液压传动控制系统的无人驾驶多功能履带车,包括履带总成、机架、传动系统及远程控制系统,履带机构包括液压马达,机架设置于履带总成上,传动系统设置于机架上,其包括发动机、液压油箱、液压泵、齿轮泵、换向齿轮箱、液压阀、后输出齿轮箱及悬挂总成,所述远程控制系统包括控制单元、无线通讯单元。本发明的远程控制系统包括控制单元、无线通讯单元等结构,能够实现履带车的远程控制,配合传动系统能够实现履带车的无人驾驶,便于在丘陵、山区等复杂地形进行作业。技术研发人员:何维勇,连挺,杨庆明,陈培敏,张学林,周斌,莫德顺,李海利,梁振海,徐晓敏,叶洪晓,孙飞龙,朱奕州,王利,刘期文受保护的技术使用者:中联重机浙江有限公司技术研发日:技术公布日:2024/6/20本文地址:https://www.jishuxx.com/zhuanli/20240722/227583.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。