联动式脚掌结构及机器恐龙腿部骨架的制作方法
- 国知局
- 2024-08-01 07:44:32
本技术属于机器人领域,特别涉及一种联动式脚掌结构及机器恐龙腿部骨架。
背景技术:
1、四足仿生机器人在道具、玩具、教具等领域为一种常见种类的机器人,多用来模仿恐龙或大型爬行类动物的动作,其中各个关节的运动细致程度及灵活程度,为判定一台四足仿生机器人性能的关键标准。现有四足仿生机器人脚掌以及腿部通常只能做简单的运动,脚趾关节,踝关节的运动细致程度通常较差,如若增加运动细节,则需要安装更多的驱动部件如气缸,液压缸以及电机,不仅会使成本大幅度增加而且很难保证原有的机械强度,无法在少量应用驱动部件的情况下,便能够提升脚掌以及腿部的灵活度。
2、在申请号为“cn201610301644.3”的专利文献中公开了一种仿生液压四足机器恐龙结构,包括恐龙躯干、连接在恐龙躯干上的头颈部、尾部、四条机械腿,头颈部由四个活动关节组成,上颈关节分别通过前、后转动轴连接于头部的上颌和下颌、下颈关节,下颈关节通过旋转轴与恐龙躯干连接,头部与下颈关节之间通过连杆机构连接,实现下颈关节和头部的联动;尾部通过旋转轴连接在恐龙躯干上,尾部由九个活动关节构成,九个活动关节从头至尾依次通过九个纵横交替的旋转轴连接,九个活动关节内装有九个伺服液压缸,在九个伺服液压缸配合传动下实现尾巴的全方位的摇摆;四条机械腿包括依次连接的髋关节、大腿关节、小腿关节、脚掌;髋关节在髋关节液压缸驱动下实现恐龙机械腿侧向姿态的调整。该对比文件中的脚趾需要额外的液压缸进行驱动才能够实现联动,驱动件过多结构复杂,并且脚掌本身无法实现侧翻等更细致的动作,具有成本高,结构强度底,动作细致度不够的缺陷。
3、以上背景技术内容的公开仅用于辅助理解本实用新型的实用新型构思及技术方案,其并不必然属于本专利申请的现有技术,在没有明确的证据表明上述内容在本专利申请的申请日已经公开的情况下,上述背景技术不应当用于评价本技术的新颖性和创造性。
技术实现思路
1、本实用新型的目的在于提供一种联动式脚掌结构及机器恐龙腿部骨架,从而克服现有仿生机器脚掌无法在简单的结构下满足更细致动作,经济性及结构强度低的缺陷。
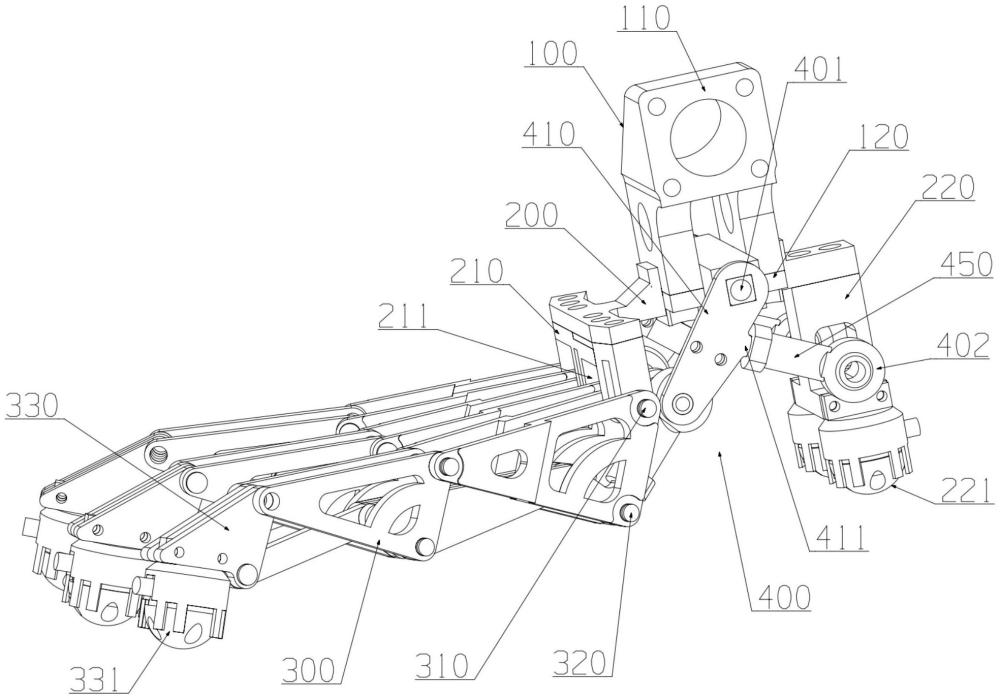
2、为实现上述目的,本实用新型提供了一种联动式脚掌结构,包括:脚踝座,所述脚踝座设有第一连接端和第二连接端,所述第一连接端与腿部固定连接;脚掌座,所述脚掌座的中部以第一转动轴线与所述第二连接端转动连接,且所述第一转动轴线与所述第一连接端与所述第二连接端之间的连线垂直,所述脚掌座的两端的连线与所述第一转动轴线平行;脚趾连杆组件,所述脚趾连杆组件的一端设有第一转动端和第一主动端,所述脚趾连杆组件的另一端设有第一被动端,所述第一转动端与所述脚掌座的一端转动连接;驱动臂组件,所述驱动臂组件的中部设有第二转动端,所述驱动臂组件的两端分别设有第二主动端和第二被动端,所述第二转动端为两个并分别以第二转动轴线与所述脚掌座的两侧转动连接,所述第二转动轴线与所述第一转动轴线垂直,所述第二被动端与所述第一主动端转动连接,所述第二主动端为两个并分别位于所述脚掌座的两侧;当两个所述第二主动端向同一方向转动时能够驱使所述第一被动端弯卷或伸张;当两个所述第二主动端向不同方向转动时能够驱使所述脚掌座沿所述第一转动轴线转动。
3、优选的,上述技术方案中,所述脚趾连杆组件的数量为三组以上,且各所述脚趾连杆组件以所述第一转动轴线为中心对称设置。
4、优选的,上述技术方案中,在所述脚掌座的一端设有可拆卸的趾部连接块,所述趾部连接块上设有若干个连接部,所述连接部的数量与所述脚趾连杆组件的数量相一致,所述第一转动端以第三转动轴线与所述连接部转动连接,各所述第三转动轴线之间具有一定夹角以使各所述第一被动端之间逐渐相互远离。
5、优选的,上述技术方案中,在所述第一被动端设有第一脚垫,在所述第一脚垫内设有第一压力传感器。
6、优选的,上述技术方案中,在所述脚掌座的另一端设有跟部连接块,在所述跟部连接块上设有两个第二脚垫,各所述第二脚垫对称设置在所述第一转动轴线的两侧,在所述第二脚垫内设有第二压力传感器。
7、优选的,上述技术方案中,所述驱动臂组件包括第一连接臂、轴杆、第一连接杆和第二连接杆,所述第一连接臂的数量为两根,所述第二转动端设于所述第一连接臂的一端,所述轴杆将两根所述第一连接臂的另一端相互连接;所述第一连接杆的一端与所述轴杆转动连接,所述第一连接杆的另一端与位于中央的一组所述脚趾连杆组件的第一主动端转动连接;所述第二连接杆的数量为两根以上并对称设置在所述第一连接杆的两侧,所述第二连接杆的一端与所述轴杆球面铰接,所述第二连接杆的另一端与位于两侧的所述脚趾连杆组件的第一主动端转动连接。
8、优选的,上述技术方案中,所述第二连接杆的两端之间能够伸缩。
9、优选的,上述技术方案中,在所述第一连接臂的一侧设有向外延伸的插杆,所述插杆上套设有可滑动的套杆,所述套杆的端部设有所述第二主动端。
10、另一方面,为实现上述目的,本实用新型提供了一种机器恐龙腿部骨架,其包括如上所述的联动式脚掌结构,还包括:胯部骨架、第一关节座、第二关节座、第一腿部骨架、第二腿部骨架和第三腿部骨架;所述第一关节座的一端与所述胯部骨架的侧部转动连接,所述胯部骨架上设有第一驱动电机以驱动所述第一关节座的另一端向所述胯部骨架的侧方转动;所述第二关节座的一端与所述第一关节座转动连接,所述第一关节座上设有第二驱动电机以驱动所述第二关节座转动,所述第二关节座的转动轴线与所述第一关节座的转动轴线垂直;所述第一腿部骨架的一端与所述第二关节座的另一端转动连接,所述第二关节座上设有第三驱动电机以驱动所述第一腿部骨架转动,所述第一腿部骨架的转动轴线与所述第二关节座的转动轴线垂直;所述第二腿部骨架的一端与所述第一腿部骨架的另一端转动连接,所述第一腿部骨架上设有第四驱动电机以驱动所述第二腿部骨架转动,所述第二腿部骨架的转动轴线与所述第一腿部骨架的转动轴线相互平行;所述第三腿部骨架的一端与所述第二腿部骨架的另一端转动连接,所述第二腿部骨架上设有第五驱动电机以驱动所述第三腿部骨架转动,所述第三腿部骨架的转动轴线与所述第二腿部骨架的转动轴线相互平行,所述第一连接端与所述第三腿部骨架的另一端固定连接。
11、优选的,上述技术方案中,在所述第一腿部骨架上设有第六驱动电机和第七驱动电机,所述第六驱动电机通过第一曲柄连杆组件与其中一个所述第二主动端球面铰接,所述第七驱动电机通过第二曲柄连杆组件与另一个所述第二主动端球面铰接。
12、与现有的技术相比,本实用新型具有如下有益效果:
13、1.本实用新型中的联动式脚掌结构中的驱动臂组件,不仅能够控制脚趾连杆组件的弯卷和伸张动作,而且还能够控制脚掌座向脚踝座的两侧侧翻,不仅增加了整体动作的细致程度,而且只通过两个独立的第二主动端的动作便能够实现脚趾弯曲和脚掌侧翻两个动作,使驱动部件更少,经济型和结构强度更高。
14、2.本实用新型中的脚趾连杆组件的数量为三组以上,并且各脚趾连杆组件的活动端成分散状态并安装有第一脚垫,在脚掌的后端设置有跟部连接块,在跟部连接块上设置有两个第二脚垫,以能够使脚掌具有更大的支撑面积,使脚掌触地更加稳定,在第一脚垫和第二脚垫内分别设置有第一压力传感器和第二压力传感器,从而能够感知脚掌触地时的偏转状态,以能够通过驱动电机对其进行及时调整。
15、3.本实用新型中的腿部骨架通过第一关节座和第二关节座的设置,能够使腿部骨架除行走的功能外,还能够进行外翻动作,从而提升了腿部骨架的运动的细致程度。
本文地址:https://www.jishuxx.com/zhuanli/20240722/228771.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表