电动自行车助力车模式的辅助动力输出控制方法及系统
- 国知局
- 2024-08-01 07:50:42
本发明属于电动自行车,具体涉及一种可满足多工况的辅助动力输出控制方法及系统。
背景技术:
1、在目前的社会生活中,电动自行车凭借其独到的便捷性被广泛使用,其中常见的工作模数包括:电动车模式、助力车模式及自行车模式。其中,助力模式作为电动自行车重要的骑行模式在交通、医疗康复、健身休闲中被越来越重视。
2、在电动自行车的助力车模式下,安装在电动自行车上的传感器负责监测骑行者对踏板施加的载荷信息,并将信号传递至控制器,当控制器收到信号后基于一定的计算结果对电机发出指令,电机收到控制信号后通过一定的机械传动装置为电动自行车提供一定动力辅助,其中电动自行车辅助动力控制方法主要可分为两类:
3、1、使用力矩传感器检测骑行者对电动自行车踏板施加的动态扭矩,控制器根据输入扭矩大小控制电机辅助动力输出,这种方法精度较高,实时性好,且可实现电机输出的平滑过渡,骑行体验较好,但力矩传感器在实际应用过程中需要安装在电动自行车的中轴上,需要对电动自行车中轴结构进行一定修改,这将提高成本,降低电动自行车经济效益。
4、2、使用转速传感器对骑行者对电动自行车踏板转速进行监测,电机输出的辅助动力大小随着踏板转速的提高而提高,这种方法虽然成本相对较低,但在某些环境下会使控制器会对电动自行车工作状态发生误判,例如在上坡及逆风等需要较大辅助动力时,由于骑行者无法对踏板施加较大转速,反而出现动力减小。
技术实现思路
1、本发明提供了一种电动自行车助力车模式的辅助动力输出控制方法及系统,通过传感器测量电动自行车行驶状态,结合电机输入输出特性更新电动自行车行驶过程中的实时二阶系统模型,以此为依据实现电动自行车辅助动力输出的控制。
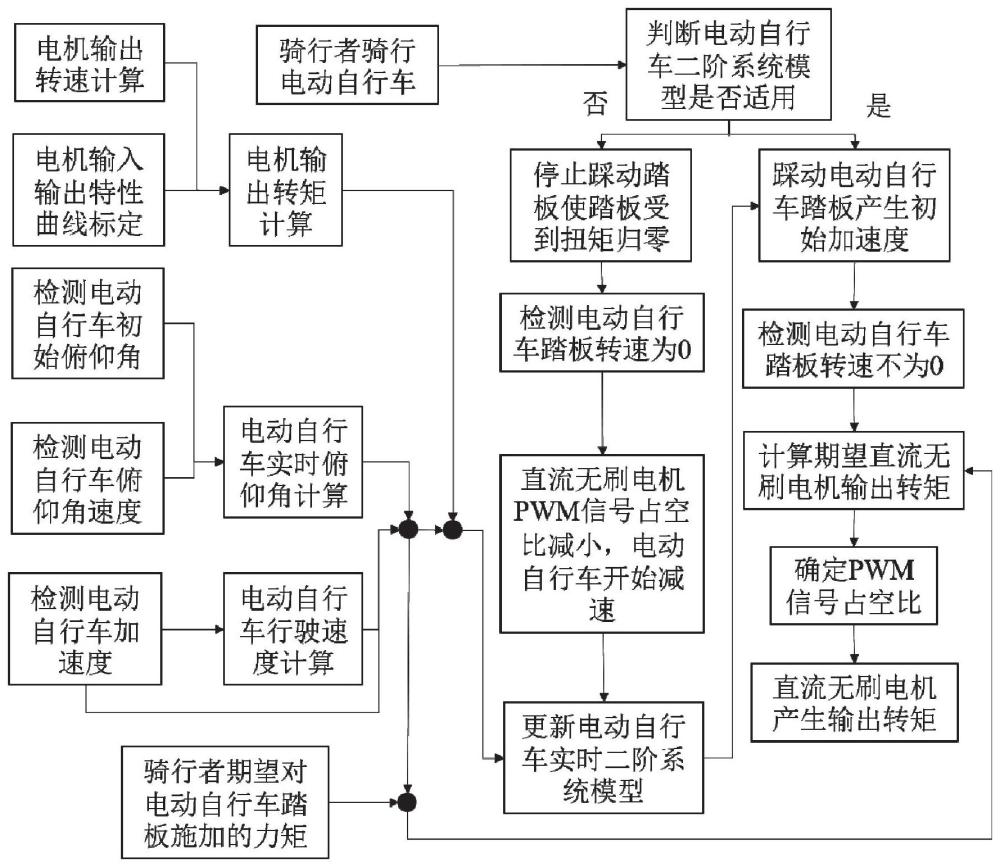
2、为达到上述目的,本发明所述一种电动自行车助力车模式的辅助动力输出控制方法,包括以下步骤:
3、s1、对电动自行车用的直流无刷电机进行标定,得到在额定电压下不同占空比驱动信号的电机转矩-转速特性曲线;
4、s2、测量电动自行车在行驶过程中的俯仰角、加速度和速度;
5、s3、在骑行过程中,检测骑行者是否对踏板产生踩踏动作;
6、s4、当骑行者停止踩动踏板,此时检测到的电动自行车踏板转速为0,使电动自行车减速,根据电动自行车在行驶过程中的俯仰角、加速度、速度、直流无刷电机转矩对二阶系统模型更新;
7、s5、当骑行者踩动电动自行车踏板时,检测到电动自行车踏板转速不为0,根据二阶系统模型、电动自行车俯仰角、加速度、速度、骑行者期望给电动自行车踏板施加力矩计算期望直流无刷电机输出的转矩;
8、s6、根据期望直流无刷电机输出的转矩和直流无刷电机转速,结合转矩-转速特性曲线进行pwm信号输出,驱动直流无刷电机转动进行辅助力矩输出。
9、进一步的,步骤s2中,通过惯性测量单元检测电动自行车初始俯仰角、俯仰角速度及在行驶方向的加速度,根据初始俯仰角、俯仰角速度及在行驶方向的加速度计算自行车在行驶过程中的俯仰角、加速度和速度。
10、进一步的,步骤s3中,用霍尔传感器检测骑行者是否对踏板产生踩踏动作。
11、进一步的,步骤s3中,二阶系统模型表达式为:
12、
13、其中,m为质量系数,θ(t)为电动自行车实时俯仰角,c为阻尼系数,v(t)为电动自行车实时速度,r为电动自行车车轮半径,m电机为直流无刷电机输出转矩,m人为骑行者对电动自行车踏板施加力矩,n电机为直流无刷电机至电动自行车车轮传动比,n人为电动自行车踏板至电动自行车车轮传动比,μ为电动自行车与路面的动摩擦因子。
14、进一步的,步骤s4中,根据电动自行车在行驶过程中的俯仰角、加速度、速度、直流无刷电机转矩对二阶系统模型更新包括以下步骤:
15、采集t1、t2、t3三个时间点电动自行车的实时俯仰角θ(t1)、θ(t2)、θ(t3),电动自行车在行驶方向上的加速度a(t1)、a(t2)、a(t3)与实时速度v(t1)、v(t2)、v(t3),将以上数值代入二阶系统模型得到式(2),基于式(2)对质量系数m、阻尼系数c及电动自行车与路面的动摩擦因子μ重新计算,完成对电动自行车实时二阶模型的更新;
16、
17、其中,m电机(t1)为t1时刻直流无刷电机输出转矩,m电机(t2)为t2时刻直流无刷电机输出转矩,m电机(t3)为t3时刻直流无刷电机输出转矩。
18、进一步的,t1、t2、t3间隔时间大于0.5s。
19、进一步的,步骤s4中,根据电动自行车在行驶过程中的二阶系统模型、电动自行车俯仰角、加速度、速度、骑行者期望给电动自行车踏板施加力矩计算期望直流无刷电机输出的转矩的计算方法如下:
20、
21、其中,θ(t)为电动自行车的实时俯仰角、a(t)为电动自行车行驶方向上的加速度、v(t)为电动自行车行驶方向上的实时速度、m’人为骑行者期望对电动自行车踏板施加的力矩,m’电机为期望的直流无刷电机输出转矩。
22、一种电动自行车助力车模式的辅助动力输出控制系统,包括电动自行车踏板、惯性测量单元、霍尔传感器、ad转换电路、控制电路和开关电源电路;
23、惯性测量单元固定安装在电动自行车车架上,霍尔传感器安装在电动自行车踏板处,惯性测量单元和霍尔传感器均与ad转换电路连接,ad转换电路与控制电路连接,控制电路连接与开关电源电路连接,开关电源电路与直流无刷电机连接;
24、所述控制电路中内置有电动自行车的二阶系统模型,用于根据霍尔传感器、惯性测量单元测量的数据以及与直流无刷电机的转矩更新二阶系统模型,并根据更新二阶系统模型、电动自行车俯仰角、加速度、速度、骑行者期望给电动自行车踏板施加力矩计算期望直流无刷电机输出的转矩;根据期望直流无刷电机输出的转矩计算结果和直流无刷电机转速,结合电动自行车的转矩-转速特性曲线进行pwm信号输出,驱动直流无刷电机转动进行辅助力矩输出。
25、进一步的,惯性测量单元和霍尔传感器与ad转换电路之间连接有信号处理电路。
26、与现有技术相比,本发明至少具有以下有益的技术效果:
27、本发明在控制方案设计及系统的构建过程中不使用力矩传感器,大大降低了电动自行车制造成本。使用惯性测量单元对电动自行车行驶状态进行实时监测,以此为依据并结合电动自行车的实时二阶系统模型对直流无刷电机输出转矩进行控制,使得骑行者在不同路况、地形、载重等不同骑行环境下对电动自行车踏板施加力矩基本恒定,在遇到爬坡等情况时,骑行者不必增加对电动自行车踏板施加的力矩,仍然能够正常行驶,从而提升骑行者的骑行体验。
28、本发明提供的二阶系统模型是根据电动自行车在行驶过程中实际二阶微分方程建立的,由于在行驶过程中位移大小不会对电动自行车行驶产生影响,故在模型建立过程中不包含位移项,该二阶系统模型具有较高的可信度,在不改变电动自行车结构的同时,最大程度上实现了对电机输出转矩的精确控制,使骑行者可在不同使用条件下均能保证对踏板的力矩保持恒定,提高骑行者骑行体验。
29、此外,本发明在模型更新过程中,基于三个时间点的电动自行车状态对模型参数进行重新计算,通过对方程组的求解实现对电动自行车二阶系统模型的更新,该方法求解速度快,在骑行过程中不会因为模型更新产生长时间的停顿,大大提高了骑行者的骑行体验。
本文地址:https://www.jishuxx.com/zhuanli/20240722/229142.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表