半径可变式球形机器人及其半径调节方法
- 国知局
- 2024-08-01 07:59:15
本发明涉及球形机器人,具体是涉及一种半径可变式球形机器人及其半径调节方法。
背景技术:
1、球形机器人是一种外表为球形,并像球一样进行滚动运动的机器人,球形的外壳使它几乎不会倾覆。球形机器人造型独特,其转弯半径很小,使得它能够灵活的运动;而且球形的结构使它有着较强的自我恢复能力,也使机器人能够轻易滚过粗糙的地形,适应各种恶劣的环境。
2、其中主流的球形机器人是质心偏移式球型机器人。质心偏移式球形机器人的运动是通过改变球体内部的质心位置来实现的,常常将质心(即重物)设置在球形机器人的内部主轴附近,通过电机控制机器人的主轴进行转动使得重物进行摆动,改变整个机器人的重心,使其朝重心侧偏移,从而实现球形机器人的运动。但是这种质心偏移方式,重物往往比较趋向于机器人的中心处,这样通过重物进行摆动改变质心移动的方式,得到的收益低,转动惯量小,不仅消耗的能源大,而且机器人的越障能力不足。
3、而且,现有的球形机器人多为直径固定式球形机器人,直径固定式球形机器人的运动还是存在工作空间比较单一、对运动地形的要求较高、在狭小不平整的环境中运动能力不足等技术问题,难以适应运动空间、路面情况经常变化的场合。现有直径可变式球形机器人在直径变大的过程中,运动阻力矩逐渐变大,但驱动力矩基本不变,致使驱动力矩略显不足。
4、现有技术中,如申请号为201010615231.5的中国专利申请,公开了一种电磁驱动球形机器人,其为一个电磁驱动质心偏移式的球形,其驱动装置由固定在球壳周围一圈的磁铁,和固定在球体主轴托架上的电磁线圈组成,通过控制电磁线圈的交替变化,使得球形机器人进行运动,该类机器人结构简单,承载能力强,提高了内部空间的利用率,但是其磁铁和电磁线圈的排布要求使得其外部球壳直径固定,无法适应一些狭小非结构化环境或者路面状况多变的环境,环境适应能力不足。
5、又如申请号为201310559139.5的中国专利申请,公开了一种实用快速充气球形机器人,其通过一个双层结构,和内部呈经纬交叉的充气支架实现快速充气,实现球形机器人的体积变化,但是它的内部空间利用率低,重启支架占据了大部分的空间,没有其他空间去优化其驱动系统,因此它的驱动只能靠弹跳完成,自由运动困难。
6、又如申请号为201910904134.9的中国专利申请,公开了一种折展式变径球形机器人,其驱动机构是一种质心偏移原理的机构设置在球壳内部,折展机构设置在球壳外部是由几段电动支撑杆相连组成,通过电动支撑杆的折叠展开实现变径,这种方式实现了球形机器人的变径,并通过质心偏移式的驱动装置实现了球形机器人能在狭小空间内的平稳运行,但是其结构复杂,特别是球壳外部的折展装置,不利于在一些杂物多的恶劣环境中运行,且驱动装置固定不变,在该球形机器人直径变大的过程中,运动阻力矩会逐渐变大,但因为驱动装置不会随着球形机器人的直径的边大而变大,驱动力矩基本不变,致使驱动力矩略显不足,爬坡性能不足。
技术实现思路
1、发明目的:针对以上问题,本发明提供一种驱动力矩随直径同步变化的半径可变式球形机器人。
2、本发明还提供一种由上述半径可变式球形机器人的半径调节方法。
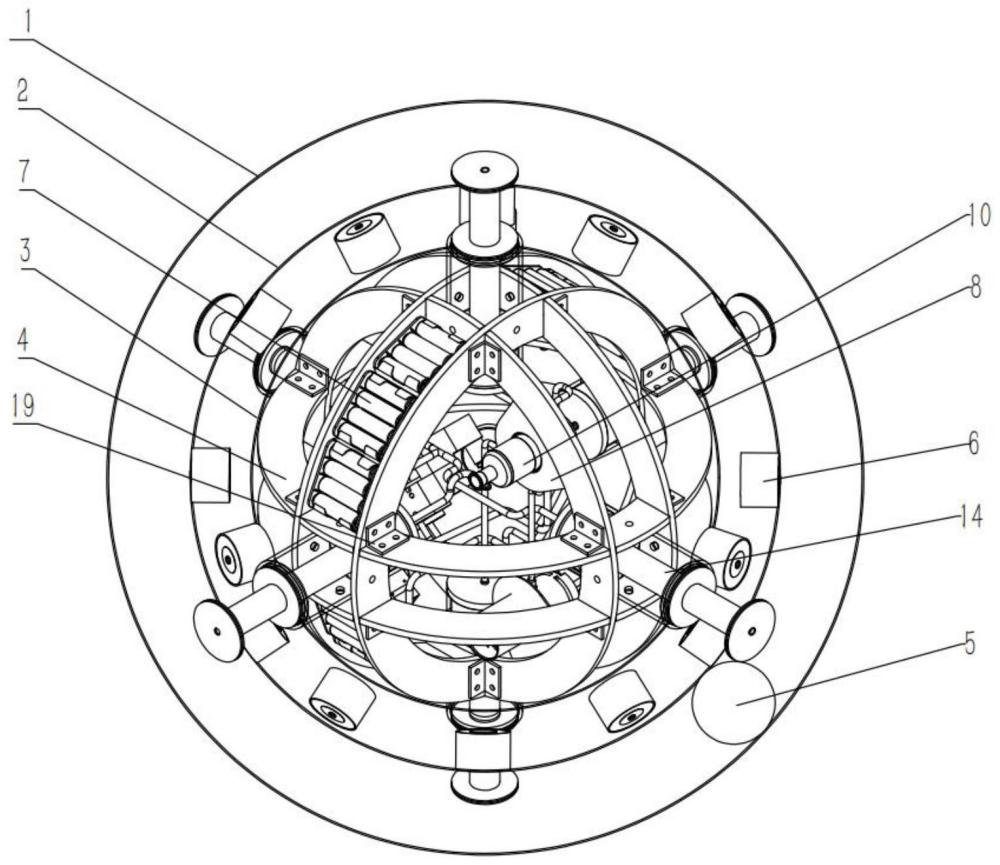
3、技术方案:为解决上述问题,本发明采用一种半径可变式球形机器人,包括双层球膜、位于双层球膜内的球形内壳、磁力驱动装置和气压控制变径装置,所述双层球膜包括外层球膜和内层球膜,外层球膜和内层球膜采用弹性材料,所述磁力驱动装置包括钢球和电磁铁,所述外层球膜和内层球膜之间设置活动的钢球,所述内层球膜上均匀固定排布若干电磁铁,电磁铁位于内层球膜与球形内壳之间,电磁铁得电吸附钢球;
4、所述内层球膜和球形内壳设置若干通孔用于气体流通,所述外层球膜设置若干通孔用于气压控制变径装置向球形机器人内部充入或排出气体。
5、进一步的,所述气压控制变径装置包括若干围绕球形内壳球心均匀分布的弹簧缸,所述弹簧缸的延伸方向沿球形内壳的径向,所述弹簧缸包括缸体、由缸体内向外延伸的活塞、设置于缸体和活塞之间的弹簧,所述缸体贯穿球形内壳,且端部设置通孔与球形内壳连通,所述活塞内部中空通过缸体的通孔与球形内壳连通,活塞由缸体内向外延伸部分穿过内层球膜,且与内层球膜固定连接,活塞端部与外层球膜固定连接,且活塞内部中空部分与外层球膜的通孔连通;所述活塞与内层球膜和外层球膜固定连接处之间的距离不小于钢球的直径。
6、进一步的,所述活塞通过嵌套装置与内层球膜和外层球膜固定连接,嵌套装置包括固定套设于活塞上的上固定层和下固定层,所述内层球膜和外层球膜固定于上固定层和下固定层之间。
7、进一步的,所述气压控制变径装置还包括气泵、换向阀,所述气泵的进气口与外层球膜的部分通孔连通,气泵的出气口与换向阀的第一进气口连通,换向阀的第二进气口和第一出气口与球形内壳内部连通,换向阀的第二出气口与外层球膜的部分通孔连通。
8、进一步的,所述气压控制变径装置还包括溢流阀,所述溢流阀的进气口与气泵的出气口连通,溢流阀的出气口与外层球膜的部分通孔连通,外层球膜的全部通孔均与气泵的进气口、换向阀的第二出气口、溢流阀的出气口中的其一连通。
9、本发明还采用一种用于上述半径可变式球形机器人的半径调节方法,包括以下步骤:
10、确定球形机器人的工作模式,工作模式包括坡面模式、坡面跃障模式、坡面迎风模式;
11、当工作模式为坡面模式时,确定坡面角度,若坡面角度大于球形机器人的最大爬坡角度,则返回无法爬坡提示,否则,计算该坡面角度下球形机器人的最小半径,调整球形机器人的半径大于或等于最小半径;
12、当工作模式为坡面跃障模式时,确定坡面角度及障碍高度,将障碍高度等效于附加坡面角度,若坡面角度加附加坡面角度大于球形机器人的最大爬坡角度,则返回无法爬坡提示,否则,计算坡面角度加附加坡面角度下球形机器人的最小半径,调整球形机器人的半径大于或等于最小半径;
13、当工作模式为坡面迎风模式时,确定风速,若风速大于球形机器人的最大爬坡能力下的风速,则返回无法爬坡提示,否则,根据风速确定球形机器人最大爬坡能力时的半径。
14、进一步的,所述球形机器人的最大爬坡角度γmax为:
15、
16、其中,m3为钢球的质量,mt为球形机器人的总质量,rb为钢球的半径,ramax为球形机器人的最大半径。
17、进一步的,所述球形机器人爬坡时的最小半径ra为:
18、
19、其中,γ为坡面角度或者为坡面角度加附加坡面角度α,h为障碍物的高度。
20、进一步的,所述根据风速vw确定球形机器人最大爬坡能力时的半径包括:
21、(1)当时,其中,g为重力加速度,ρ为空气密度,cd为阻尼系数,将球形机器人半径调节到最大值ramax,球形机器人达到最大爬坡能力;
22、(2)当时,ramin为球形机器人可以调节到的最小半径,将球形机器人半径调节到球形机器人达到最大爬坡能力;
23、(3)当时,将球形机器人半径调节到最小值ramin,球形机器人达到最大爬坡能力。
24、有益效果:本发明相对于现有技术,其显著优点是通过在在该球形机器人体积发生变化后,驱动装置提供的驱动力能够随着球形机器人体积的变化而变化,能够满足球形机器人在不同体积时运动对驱动力的需求,使得转动惯量大,节省能源,提升了越障能力。半径可变使得该球形机器人能够适应各种运动空间,包括狭窄的、路面经常变化的环境,相对于半径不可变球形机器人,环境适应能力强。
本文地址:https://www.jishuxx.com/zhuanli/20240722/229789.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表