一种瓶颈路段下CAV速度协同通行的方法
- 国知局
- 2024-09-14 14:55:44
本发明属于智能交通领域,具体涉及一种瓶颈路段下cav速度协同通行的方法。
背景技术:
1、高速公路作为我国公路交通建设的重要组成部分,是连接各大中心城市的主动脉,而高速公路隧道作为其典型路段,其通行效率和安全性直接影响着高速路网整体运行效益。高速公路隧道作为高速路网关键节点,该路段交通状态很大程度上限制着交通系统的最大通行能力。而高速公路隧道场景具有相对统一的建造标准和交通规则,这有利于先进通行策略的研究和实践。
2、有学者发现在道路瓶颈问题中,以混合交通中的网联自动车为载体,引入相关智能驾驶算法(如自适应巡航(acc)、协同自适应算法(cacc)等)能有效改善其通行效率。目前基于网联和智能驾驶算法的瓶颈道路通行控制策略大致可以分为两类:最优控制策略、基于规则的控制策略。其中,最优控制策略通过采集来自路侧设备和网联自动车的交通数据,经过计算分析得到网联自动车的最优顺序或最优路径。li等人认为车辆通过顺序的瓶颈路段通行的核心问题,而改善瓶颈通行效率就是要寻找系统负载和性能之间的最优解。pei等人基于动态规划算法制定道路瓶颈通行顺序和路径策略,仿真结果表明,该策略在效率和安全优化方面具有良好的性能。jing考虑了多驾驶员协同博弈问题设计了优化算法,通过仿真验证了该模型的有效性。李鑫考虑主路车流主动换道对汇流区瓶颈交通效率的影响,采用粒子群优化算法寻求主动换道比例的最优化,设计了主动换道控制策略。ding等人针对瓶颈路段合流通行问题提出了基于规则的调整算法,通过在车流平衡和不平衡场景下进行仿真验证了该方法对于提效,节能的有效性。hu考虑在瓶颈道路上游设置专门用于换道合流的控制区,对该区域内所有车辆实施流量平衡策略进行轨迹优化。实验结果表明,上述方法在一定程度上优于协同汇流策略。
3、但是在高速公路隧道内部出现突发瓶颈时,由于上游车流对道路通行能力感知能力不足以及上述方法存在换道冲突集中的问题,上述方法难以缓和上游车流对瓶颈处的持续冲击,待通行车流纵向跟驰行驶的协调性和稳定性较差,极易影响通行效率。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种瓶颈路段下cav速度协同通行的方法。本发明旨在解决现有方法难以缓和上游车流对瓶颈处的持续冲击,待通行车流纵向跟驰行驶的协调性和稳定性差,极易影响通行效率的问题。
2、本发明提供了一种瓶颈路段下cav速度协同通行的方法,包括以下步骤:
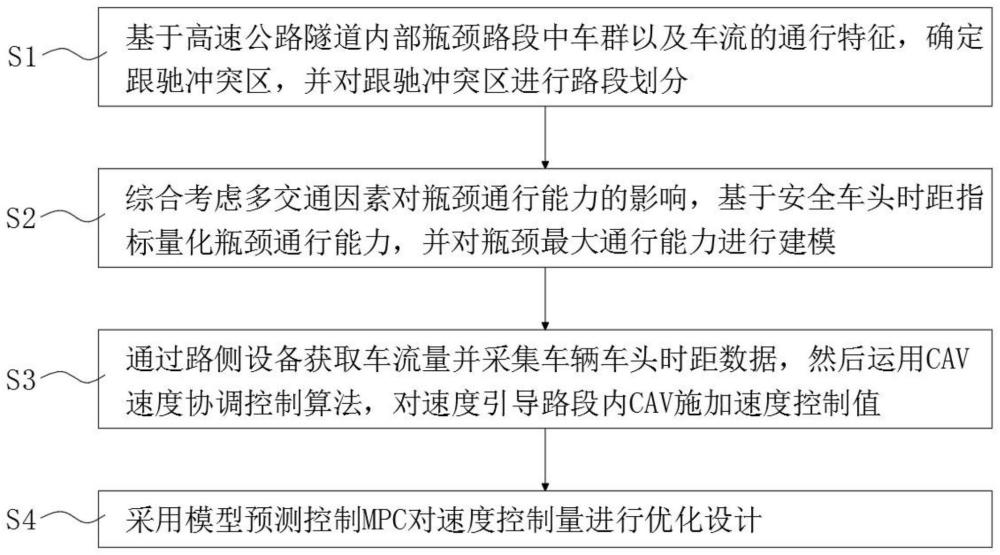
3、s1.基于高速公路隧道内部瓶颈路段中车群以及车流的通行特征,确定跟驰冲突区,并对跟驰冲突区进行路段划分;
4、s2.综合考虑多交通因素对瓶颈通行能力的影响,基于安全车头时距指标量化瓶颈通行能力,并对瓶颈最大通行能力进行建模;
5、s3.通过路侧设备获取车流量并采集车辆车头时距数据,然后运用cav速度协调控制算法,对速度引导路段内cav施加速度控制值;
6、s4.采用模型预测控制mpc对速度控制量进行优化设计。
7、进一步,所述步骤s1中,跟驰冲突区按功能划分为cav车速控制路段、自由演化路段和监测路段;
8、cav车速控制路段设置在跟驰冲突区的中上游路段,cav车速控制路段远离道路瓶颈,车辆拥挤程度相对较低,用于实施cav车速控制;
9、自由演化路段设置在邻近道路瓶颈处的下游区域,用于缓冲调整车速,让车流速度和跟车间距自由演化至稳定状态;
10、监测路段设置在紧邻道路瓶颈的下游区域,用于检测道路瓶颈处的通行能力,并将道路瓶颈处的通行变化情况传输至控制系统,为上游cav速度控制路段中混合车群调控目标提供参考。
11、进一步,所述步骤s2构建的瓶颈最大通行能力的模型为:
12、
13、式中,pi表示表示监测路段车流中第i辆车为cav的概率,若监测路段车流中cav渗透率为p0,则监测路段中第i辆车为cav的概率为p0,第i辆车为chv的概率为p1,p0+p1=1;aij表示相邻两车中前车为i类型,后车为j类型的概率;tij表示相邻两车中前车为i类型后车为j类型的车头时距;s表示监测路段混合车流对应的状态空间。
14、进一步,所述步骤s3包括以下子步骤:
15、s3.1采集车流量以及车辆车头时距数据,以路段车流量f为主要指标,通过对比监测路段当前车流量与路段理论最大车流量的大小关系,判断是否满足实施控制的临界条件;
16、s3.2在满足控制临界条件的前提下,实施cav速度协调控制策略,借助模型预测控制算法优化设计控制速度vlb,然后对车速引导路段中的cav施加控制速度vlb,每个控制周期对cav施加相同的控制速度vlb;
17、s3.3通过宏观交通流cnn演化模型预测下一时刻车流量f*(t+1)。
18、进一步,所述步骤s3中,实施控制的临界条件为:流量f(t)大于瓶颈最小稳定通行能力(1-δ)f(t),小于最大通行能力为f(t),具体表达式如下:
19、f(t)∈[(1-δ)f(t),f(t)]
20、式中,f(t)为监测路段路侧实时采集的车流量;(1-δ)f(t)为车流受扰动后的瓶颈处最小稳定通行能力;δ表示波动影响系数。
21、进一步,所述步骤s3中,控制速度vlb的表达式为:
22、
23、
24、式中,为路段期望车流量,kl为控制系数。
25、进一步,所述步骤s4中,模型预测控制mpc优化设计速度控制量的步骤为:
26、将cav车速控制路段均分为a,b,c三个控制区间,分别施加不同的控制速度综合优化目标函数,最小目标函数值,通过排列算法枚举获得速度组合,即为最优解;
27、优化目标函数为:
28、
29、式中,f*(t+1)为施加控制速度vlb(t)后,速度引导路段下一时刻的车流量。
30、进一步,所述约束条件为:
31、vlb(t)∈[0,80]
32、式中,控制速度vlb(t)取10或5的倍速。
33、有益效果:
34、1、本发明针对高速公路隧道内部出现突发瓶颈时,上游车流对道路通行能力的感知能力不足以及换道冲突集中的问题,利用信息物理系统(cyber-physical system,cps)思想,结合跟驰冲突区通行难点,设计了结合瓶颈通行能力的cav速度协调通行策略。以车头时距为量化指标,考虑了车辆安全车头时距差异,完成了瓶颈通行能力的建模,为协调算法的研究提供可靠模型依据。
35、2、另外,在设计cav速度协调控制算法基础上,结合车流宏观演化模型,利用mpc算法对目标控制速度进行优化求解。将速度控制路段划分为三个调控区间,对同一区间中cav施加相同控制速度,在保障控制效果的同时,降低了优化求解难度和耗时,该策略为缓和上游车流对瓶颈处的持续冲击、提高待通行车流纵向跟驰行驶的协调性和稳定性提供了新途径,改善了跟驰冲突区车辆通行效率。
36、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究,对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
本文地址:https://www.jishuxx.com/zhuanli/20240914/296408.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。