制动系统结构和具有制动系统结构的车辆的制作方法
- 国知局
- 2024-10-09 16:13:27
本发明涉及一种用于车辆的制动系统结构、尤其是线控制动系统,在其中尤其用于制动请求的检测装置和实现装置机械地彼此解耦。本发明还涉及一种具有相应的制动系统结构的车辆。
背景技术:
1、线控制动系统是基本上已知的。不仅对于传统的车辆而且对于自动(根据sae定义为4级)直至自主(根据sae定义为5级)行驶的车辆,线控制动系统都可提供多个优点。
2、对于自动行驶的车辆而言,线控制动系统可实现脚踏板机构的翻开和/或收回。由此为驾驶员(该驾驶员在全自动行驶中成为乘客)创造了用于活动、例如睡觉、看报纸、上网等的更多空间。此外,在制动踏板和制动致动器之间的机械解耦避免了在全自动行驶期间发生意外的错误操作:即使在制动踏板没有被收回时,在全自动行驶期间(例如驾驶员在此睡着)无意触碰到制动踏板然而也不导致意外的车辆反应。在自主车辆的情况下没有设置驾驶员,从而在此线控制动系统是强制性需要的。
3、对于传统车辆,线控制动系统可通过翻开和/或收回脚踏板机构来使上车和下车变得容易。制动行为可单个地与驾驶员相适配和个性化。通过制动特征线的电子的可设定性(制动力矩与踏板行程和/或踏板力有关),可以如此改变所述制动特征线,使得驾驶员感觉到制动行为更软或更硬、运动或舒适、直接或有阻尼。这种设定可以单个地对于驾驶员从车辆到车辆进行传输。
4、此外,也可设想在环境保护方面的优点。通过增大在制动盘和制动衬片之间的气隙,可以降低残余制动力矩。这实现了二氧化碳和制动粉尘排放的减少以及电池电力的续驶里程的增加。
5、此外,可实现在安全方面的优点。通过经由压杆/拉杆断开在制动踏板和制动调节系统之间的机械连接,可在碰撞情况下减少踏板侵入。
6、此外,车辆能以简单的方式设计成符合残疾人需求的。对于带有身体残疾的人而言(身体残疾使得操作踏板变得困难或变得不可能),在线控制动系统按照批量进行安装的情况下可提供备选的操作概念,而无需进行耗费的车辆改装。
7、此外,由此减少了变型方案多样性。现在,在所有车辆级别上都可以安装几乎统一的脚踏板机构。
8、在线控制动系统的情况下省却了由驾驶员实现机械的回退层级。为了使具有线控制动系统的车辆在发生首次故障后能以降级行驶模式(如降低的速度)和/或在受限的情况下(如仅在受限的时间内或受限的距离内)继续行驶,可预留回退层级。
9、由de 10 2020 202 477 a1已知一种用于可电驱动的机动车的安全系统,该安全系统具有三个制动设备。该机动车在此构造成能全自动驱动和/或能自主驱动。
10、由de 10 2019 216 896 a1已知一种用于车辆的制动系统,该制动系统具有初级制动系统和次级制动系统。在此,两个制动系统经由两个不同的控制系统彼此独立地控制。
11、在已知系统中的缺点是,在发生二次故障之后和/或在初级制动系统和此外次级制动系统回退之后,不再能确保车辆的继续行驶以及在运行中的安全性。
技术实现思路
1、因此,本发明的任务是为车辆提供一种改善的制动系统结构,尤其是线控制动系统,其中,尤其是用于制动请求的检测装置和实现装置机械地彼此解耦。尤其是,本发明的任务是为车辆提供这种制动系统结构,尤其是这种线控制动系统,该制动系统结构可实现车辆运行中的提高的安全性,并且该制动系统结构创造改善的客户舒适度。此外,本发明的任务是提供一种具有相应的制动系统结构的改善的车辆。
2、根据本发明的任务通过以下来解决:一种具有独立装置权利要求的特征的用于车辆的制动系统结构、尤其是线控制动系统,其中,优选用于制动请求的检测装置和实现装置机械地彼此解耦。此外,本发明还涉及一种具有并列的装置权利要求的特征的相对应的车辆。在此,与本发明的各个方面和/或实施方式相关所描述的特征自然也与其他方面和/或实施方式相关适用,且分别反之亦然,从而关于对于各个发明方面和/或实施方式的公开内容总是相互参考或能相互参考。
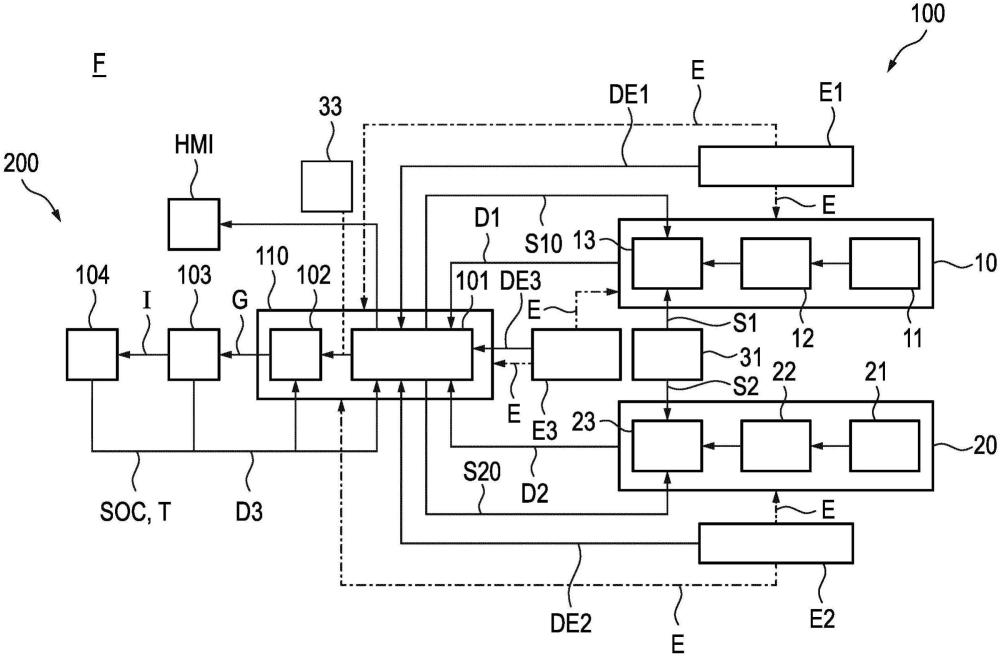
3、本发明提供:用于车辆、例如混合动力车辆或电动车辆、例如全自动(根据sae定义为4级)至自主(根据sae定义为5级)行驶的车辆的制动系统结构、所谓的线控制动系统。在制动系统结构中,有利地用于制动请求(所述制动请求例如可以来自驾驶员或来自车辆)的检测装置和实现装置可以机械地彼此解耦。制动系统结构具有以下子系统:
4、-用于提供制动功能的第一(或初级)制动系统(所谓的自主的制动系统),
5、所述第一制动系统自主地构造和/或具有第一(或初级)能量供应部,
6、-用于为制动功能提供第一回退层级的第二(或次级)制动系统(所谓的自主的制动系统),
7、所述第二制动系统自主地构造和/或具有第二(或次级)能量供应部,
8、-以及用于为制动功能提供第二回退层级的第三制动系统(至少部分间接的和/或在功能上实现的制动系统),例如经由车辆的机电驱动系统,例如通过发电式减速。
9、例如,其中可使用根据本发明的制动系统结构的车辆可具有牵引电池、如高压电池,所述牵引电池能以约60v至约1.5kv的直流电压运行。车辆还可以具有电动马达。此外,车辆可以具有至少一个中央控制单元。此外,车辆可以具有驾驶员-车辆界面,例如呈交互式输入和输出单元形式,例如包括显示器、声音输出装置等。
10、其中可使用根据本发明的制动系统结构的车辆可优选构造为全自动行驶的车辆(根据sae定义为4级)或自主行驶的车辆(根据sae定义为5级)。
11、如果驾驶员具有车辆掌管权(fahrzeugführung),则制动请求可来自驾驶员,例如通过操纵电子制动踏板。如果车辆具有车辆掌管权,则制动请求来自车辆。
12、在全自动行驶的车辆(根据sae定义为4级)中,驾驶员可以成为车辆的乘客或用户。在全自动行驶的车辆中,可以设置驾驶员-车辆界面。在自主行驶的车辆(根据sae定义为5级)中,则不设置驾驶员。在那仅设置用户。在自主行驶的车辆中可以设置用户-车辆界面。
13、发明构思在此在于,在制动系统结构中设置有两个冗余地预留的自主的制动系统,它们构造成自给自足或独立自主的并且它们可以彼此独立地以及独立于车辆的其他功能系统起作用。第一和第二自主制动系统经由两个彼此独立的能量供应部、即第一和第二能量供应部来供应以电能。例如,独立的能量供应部可以分别具有高压电池,该高压电池能以约60v至约1.5kv的直流电压运行。此外,独立的能量供应部可以分别具有合适的dc/dc转换器。
14、此外,这两个制动系统中的每个可以具有多个子系统,例如分别具有制动请求检测机构(或用于检测制动请求的检测装置),并且分别具有制动请求实现机构(或用于实现制动请求的实现装置)。在两个自主的制动系统中,制动请求可经由相应的传输系统、例如总线系统或数据总线、例如带有can或sent协议的总线系统或数据总线从相应的检测机构传输到相应的实现机构。
15、相应的制动请求检测机构可以实施为电子制动踏板。例如,可以经由力传感器和/或位移传感器等来检测由驾驶员对制动踏板的操纵。制动请求检测机构的控制电子装置(其例如包括相应的电子装置和/或软件)可被动获得、主动询问并且必要时评价传感器数据。此外,相应的制动请求检测机构的控制电子装置可经由从属的传输系统将传感器数据和/或评价结果传送给相对应的制动请求实现机构。相应的制动请求实现机构也可以具有控制电子装置,其例如包括相应的电子装置和/或软件。相应的制动请求检测机构的传感器数据的评价可在制动请求检测机构的控制电子装置和/或制动请求实现机构的控制电子装置中执行。制动请求检测机构的控制电子装置和制动请求实现机构的控制电子装置可以作为单独的控制电子装置或作为共同的控制电子装置来提供。
16、至少一个或每个制动请求实现机构可以实施为所谓的“湿式”线控制动系统。相应的制动请求实现机构可以具有电动马达、各种传感器和液压阀。制动衬片位于车轮的制动钳中,所述制动衬片通过液压压力压到制动盘处。制动请求实现机构的控制电子装置和制动钳可经由(用于液压阀的)液压管路相互连接。控制电子装置操控电动马达,以便产生与检测到的制动请求相对应的一定的液压压力和因此一定的制动力矩。经由液压阀可以调整、适配和/或调节四个车轮处的压力。
17、至少一个或每个制动请求实现机构可以实施为所谓的“干式”线控制动系统。相应的制动请求实现机构可以包括电动马达、各种传感器和机械的执行元件。制动衬片位于车轮的制动钳中,所述制动衬片经由电动马达和机械的执行元件压到制动盘处。控制电子装置和制动钳可经由(用于电动马达的)能量线路和(用于传感器的)数据线路相互连接。控制电子装置操控制动钳中的电动马达,以便提供与制动请求相对应的一定的制动力矩。经由对电动马达的适当操控可以调节四个车轮处的制动力矩。
18、除了第一和第二自主的制动系统(它们可以具有自身的长时间能量供应部),还可以设置有短时间能量供应部。第三制动系统使用发电式运行的电动马达和电动马达的控制单元。电动马达直接联接到高压电池、尤其是牵引电池处。高压电池、尤其是牵引电池为第一能量供应部和第二能量供应部馈电。电动马达的控制单元联接到第一能量供应部处和短时间能量供应部处。短时间能量供应部可为第三制动系统的一部分。例如,可经由dc/dc转换器实现相应的长时间能量供应部,该dc/dc转换器可联接到相对应的高压电池处。例如,短时间能量供应部可经由低压电池和/或超级电容器(即所谓的超级电容)或类似物实现。低压电池的运行电压可处于12v至14v之间的范围中。
19、如果使用所谓的“湿式”线控制动系统,有利地这种配备有液压阀的制动系统可联接到短时间能量供应部处。因为即使在初级和次级长时间能量供应部同时发生失灵的情况下,也能至少在短时间内维持基本制动功能(如将车辆制动至静止)以及与安全相关的制动调节功能(如abs和esc)。
20、此外,发明构思在于:第三制动系统可以至少部分地作为间接或相关的和/或在功能上实现的或非直接的制动系统(或减速系统)提供,以用于为制动功能提供第二回退层级,例如经由车辆的另外的功能基本系统、如机电驱动系统,例如通过发电式减速。机电驱动系统的电动马达(该电动马达在发电机模式下运行以用于发电式减速)在此作为第三制动请求实现机构(或用于实现制动请求的实现装置)行动。经由发电机模式下的电动马达可以对于发电式减速给车辆的至少一个高压电池、尤其是牵引电池以及如有可能至少一个另外的辅助电池充电。
21、第三制动系统可有利地包括第三制动请求检测机构。例如,制动请求检测机构可经由电子驻车制动器的按钮进行。按钮可经由信号线路直接与初级和次级制动请求实现机构的电子装置连接(即无数据总线)。第三制动请求检测机构可将检测结果提供给第一和/或第二自主的制动系统。
22、制动系统结构可以具有自身的控制单元,该控制单元可以与车辆的中央控制单元处于通信连接。此外,制动系统结构可以具有控制单元,该控制单元可以在软件技术上和/或在硬件技术上集成在车辆的中央控制单元中。
23、由于子系统具有多个部件,这些部件中的一个的失灵可导致相应的子系统的失灵。例如,电子装置、传感器或软件的失灵可导致初级或次级制动请求检测机构的失灵。例如,电子装置、传感器、软件或电动马达的失灵可导致初级或次级制动请求实现机构的失灵。例如,能源线路、电池、dc/dc转换器、保险件、电子装置或软件的失灵可导致初级或次级能量供应部的失灵。数据总线的失灵、例如在制动请求检测机构和制动请求实现机构之间的数据总线的失灵也可导致初级或次级制动系统的失灵。
24、控制单元可以不仅从第一和第二自主的制动系统以及从第三间接制动系统而且从第一和第二能量供应部以及从第三能量供应部获得诊断消息、“存活”信号和/或故障状态,例如经由合适的传输系统、例如总线系统或数据总线,例如具有can或sent协议的总线系统或数据总线,例如通过can总线和/或无线传输、例如无线电传输。控制单元可以从牵引电池获得运行参数、例如荷电状态和温度,例如经由合适的传输系统、例如总线系统或数据总线、例如具有can或sent协议的总线系统或数据总线,例如通过can总线和/或无线传输、例如无线电传输。
25、根据所述输入信号(诊断消息和/或故障状态和/或运行参数),控制单元可以决定是否可以完全进行发电式减速、能以何种程度进行发电式减速和/或是否可以进行发电式减速直至静止。此外,控制单元可以决定在相应的制动系统中和/或在能量供应部中出现首次或二次故障后,是否可以继续行驶。此外,控制单元可以决定是否必须要求进行自动制动和/或强制制动,和/或是否应发电式借助电动马达和/或经由第一制动请求实现机构和/或经由第二制动请求实现机构借助制动钳进行自动制动和/或强制制动。
26、控制单元可以要求电动马达的控制单元执行发电式减速。控制单元可以要求第一制动请求实现机构和/或第二制动请求实现机构借助制动钳进行减速。此外,控制单元可以操控驾驶员-车辆界面,以便通知驾驶员有关故障的信息和/或警告驾驶员,和/或输出用于进一步运行车辆的建议,例如寻找维修车间。此外,控制单元可以通知驾驶员有关剩余的行驶距离和/或剩余的行驶时间的信息。
27、控制单元和电动马达的控制单元可以作为一个共同的控制单元或者可以作为两个单独的控制单元提供。
28、下面示例性地描述一些故障情况,从这些故障情况中得知在制动系统中的一个中发生单重故障之后根据本发明的制动系统结构的优点。优点尤其在于,可以确保车辆的继续行驶。在发生单重故障后,车辆的继续行驶是可能的,因为在发生单重故障后总是仍存在有两种可使车辆继续运行的可能性。
29、-一种相关的故障情况是初级或次级制动请求检测机构的失灵。在这种故障情况下,经由剩余的次级或初级制动请求检测机构以及经由第三制动请求检测机构(例如电子驻车制动器的按钮)继续确保对制动请求的冗余检测。车辆可以至少受限地、例如在一定时间和/或一定距离内、必要时以受限的速度继续行驶。可以经由驾驶员-车辆界面通知驾驶员有关这种情况的信息。
30、-另一种相关的故障情况是初级或次级制动请求实现机构的失灵,当可以同时进行发电式减速时。控制单元根据高压电池、尤其是牵引电池的运行参数、如荷电状态和温度来识别是否可以进行发电式减速。在这种故障情况下,经由剩余的次级或初级制动请求实现机构以及经由发电式减速来继续确保对制动请求的冗余实现。车辆可以至少受限地、例如在一定时间内和/或在一定距离内、必要时以受限的速度继续行驶。可以经由驾驶员-车辆界面通知驾驶员有关这种情况的信息。
31、-另一种相关的故障情况是用于第一或第二制动系统的第一或第二能量供应部的失灵。在第一能量供应部出现失灵的情况下,在短时间内经由第三能量供应部继续确保第一制动系统的能量供应部,并且经由第二能量供应部继续确保次级制动系统的能量供应部。在第二长时间能量供应部出现失灵的情况下,经由第一长时间能量供应部e1以及在短时间内经由第三能量供应部继续确保第一制动系统的能量供应部。车辆可以至少受限地、例如在一定时间内和/或在一定距离内、必要时以受限的速度继续行驶。可以经由驾驶员-车辆界面通知驾驶员有关这种情况的信息。
32、下面示例性地描述一些故障情况,从这些故障情况中得知在制动系统中的一个中发生单重故障或双重故障之后根据本发明的制动系统结构的优点。优点尤其在于,在发生双重故障后,车辆可以通过自动制动减速到安全状态,尽可能转移直至静止。在双重故障之后的自动制动是可能的,因为在双重故障之后仍总是还存在至少一种用于对车辆自动减速和/或基于制动请求减速的可能性。
33、-一种相关的故障情况是第一和第二制动系统的同时失灵。在这种故障情况下,控制单元要求电动马达的控制单元例如在短时间之后、例如在1分钟之后通过发电式减速进行自动制动和/或尽可能强制制动。然后,电动马达的控制单元如此操控电动马达,使得该电动马达转移到发电机运行中并且再生式减速,有利地在考虑到高压电池、尤其是牵引电池的荷电状态和/或温度的情况下。由此,车辆可以减速,有利地和/或在可能的情况下减速直至静止,并且为车辆的高压电池、尤其是牵引电池和如有可能至少一个另外的辅助电池充电。可以经由驾驶员-车辆界面通知驾驶员有关这种情况的信息和/或警告驾驶员。
34、-另一种相关的故障情况是用于第一和第二制动系统的第一和第二能量供应部的同时失灵。在这种故障情况下,控制单元和第一制动系统的能量供应部在短时间内通过第三能量供应部确保。在这种故障情况下,控制单元要求第一制动系统立即制动和/或强制制动至静止。可以经由驾驶员-车辆界面通知驾驶员有关这种情况的信息和/或警告驾驶员。
35、-另一种相关的故障情况是要么初级制动请求实现机构要么次级制动请求实现机构的失灵,当无法同时进行发电式减速时。控制单元根据高压电池、尤其是牵引电池的运行参数、如荷电状态和温度来识别是否可以进行发电式减速。对于阻止发电式减速的可能原因例如是:
36、-充满电的高压电池、尤其是牵引电池。高压电池、尤其是牵引电池不能接收能量,这阻止了通过再生式减速对高压电池充电。当高压电池、尤其是牵引电池通过再生充满电到100%时,这种情况可例如在较长的下坡行驶时出现。与此相对,在充电桩处充电时,高压电池、尤其是牵引电池通常不充满电到100%,以便保护高压电池。
37、-高压电池、尤其是牵引电池的很低的温度(例如-30℃)。不取决于高压电池、尤其是牵引电池的荷电状态,它们在很低的温度的情况下都不会接收电功率,这阻止了通过再生式减速对高压电池、尤其是牵引电池充电。
38、在这种故障情况下,控制单元要求剩余的起作用的制动系统在短时间后自动制动和/或强制制动至静止。可以经由驾驶员-车辆界面hmi通知驾驶员有关这种情况的信息和/或警告驾驶员。
39、如上文已经表明的,有利的可以是,第三制动系统可以至少部分地在功能上通过车辆的另外的功能基本系统实现、尤其是通过机电驱动系统和/或电子驻车制动器实现。以这种方式,车辆中的现有资源可用于提供用于提供制动功能的第二回退层级。第一或初级制动系统在此在正常情况下提供制动功能。用于提供制动功能的第一回退层级创造第二或次级制动系统。第二回退层级在功能上或间接地经由车辆的另外的功能基本系统创造第三(至少部分间接的)制动系统。
40、有利地,第三制动系统可以实施成用于通过发电式或再生式减速来提供制动功能。以这种方式,机电驱动系统的电动马达能以有利的方式不仅用于车辆的驱动而且用于车辆的减速。因此,电动马达可以用作用于实现制动请求的第三实现装置。
41、此外有利的可以是,第三制动系统具有用于检测制动请求的第三检测装置。以这种方式,第三(至少部分间接的)制动系统不仅可以提供制动请求检测机构(或用于检测制动请求的检测装置)而且可以提供制动请求实现机构(或用于实现制动请求的实现装置)。用于检测第三制动系统中的制动请求的检测装置是第三检测装置。用于实现第三制动系统中的制动请求的实现装置优选可以是车辆的机电驱动系统的电动马达,如果电动马达在发电机运行中运行。
42、有利地,第三检测装置可以具有电子驻车制动器的按钮。以这种方式可以提供在结构技术上简单的且有利的用于检测第三制动系统中的制动请求的检测装置。
43、因此,第三检测装置至少可以部分在功能上通过车辆的另外的功能基本系统、尤其是通过电子驻车制动器,优选电子驻车制动器的按钮实现。
44、此外有利的可以是,第三检测装置可以经由第一信号线路、尤其是直接与第一制动系统的第一实现装置的电子装置在信号技术上连接,和/或其中,第三检测装置可以经由第二信号线路、尤其是直接与第二制动系统的第二实现装置的电子装置在信号技术上连接。以这种方式,第三检测装置可以直接地、有利地在没有数据总线的情况下动用用于实现制动请求的第一和/或第二实现装置。
45、此外,可以设置有至少用于第一制动系统的第三能量供应部。优选地,第三能量供应部可实施成用于供应控制装置。在此可以设想,第三能量供应部可以构造为短时间能量供应部,其尤其包括低压电池和/或超级电容器。因此,可以在制动系统结构中提供三个能量供应部,即两个长时间能量供应部和一个短时间能量供应部,以便在能量供应部中的一个中出现单重故障的情况下或甚至在出现双重故障的情况下实现车辆的安全制动。
46、如上文已经表明的,第一制动系统或初级制动系统可以自主地实施并且可以独立于车辆中的其他系统以及自给自足地行动。为此,第一制动系统可以具有用于检测制动请求的第一检测装置、用于实现制动请求的第一实现装置和/或用于将检测到的制动请求从第一检测装置转发给第一实现装置的第一传输系统。此外,第一制动系统可以具有用于第一检测装置、第一实现装置和第一传输系统的至少一个控制电子装置。
47、如上文已经表明的,第二制动系统或次级制动系统也可以自主地实施并且可以独立于车辆中的其他系统以及自给自足地行动。为此,第二制动系统可以具有用于检测制动请求的第二检测装置、用于实现制动请求的第二实现装置和/或用于将检测到的制动请求从第二检测装置转发给第二实现装置的第二传输系统。此外,第二制动系统可以具有用于第二检测装置、第二实现装置和第二传输系统的至少一个控制电子装置,
48、有利地,第一能量供应部可构造为长时间能量供应部,其例如包括高压电池和/或dc/dc转换器。根据另一个优点,第二能量供应部可构造为长时间能量供应部,其例如包括高压电池和/或dc/dc转换器。
49、此外可以设想,第一能量供应部和/或第二能量供应部可以实施成用于供应控制单元。以这种方式,第一能量供应部和/或第二能量供应部可以跨功能地使用。
50、此外可以设想,第一制动系统在信号技术上、例如经由传输系统、如总线系统与控制单元连接,例如用于传输诊断数据。
51、此外可以设想,第一制动系统在控制技术上、例如经由传输系统、如总线系统与控制单元连接,例如用于实施自动制动和/或强制制动。
52、但是,第二制动系统也可以在信号技术上、例如经由传输系统、如总线系统与控制单元连接,例如用于传输诊断数据。
53、更进一步地,第二制动系统可以在控制技术上、例如经由传输系统、如总线系统与控制单元连接,例如用于实施自动制动和/或强制制动。
54、此外,第三制动系统也可以在信号技术上、例如经由传输系统、如总线系统与控制单元连接,例如用于传输诊断数据。
55、有利地,第一能量供应部可以在信号技术上、例如经由传输系统、如总线系统与控制单元连接,例如用于传输诊断数据。
56、此外有利的可以是,第二能量供应部在信号技术上、例如经由传输系统、如总线系统与控制单元连接,例如用于传输诊断数据。
57、此外有利的可以是,第三能量供应部在信号技术上、例如经由传输系统、如总线系统与控制单元连接,例如用于传输诊断数据。
58、如上文已经提到的,在制动系统结构中设置有控制单元。控制单元可以例如在软件技术上和/或在硬件技术上集成在车辆的中央控制单元中。备选地可以设想,控制单元可以设置为单独的控制单元。
59、优选地,所述控制单元实施成用于,
60、询问、接收和/或处理
61、-来自第一制动系统的诊断数据,
62、-来自第二制动系统的诊断数据,
63、-来自第三制动系统的诊断数据,
64、-来自第一能量供应部的诊断数据,
65、-来自第二能量供应部的诊断数据,
66、-来自第三能量供应部的诊断数据,和/或
67、-车辆的高压电池、尤其是牵引电池的至少一个运行参数。
68、以这种方式,控制单元可决定制动系统是否有功能能力、是否存在故障、是否存在双重故障和/或车辆的高压电池、尤其是牵引电池以及如有可能至少一个另外的辅助电池是否可以充电。
69、此外,控制单元可以实施成用于,
70、-操控第一制动系统和/或第二制动系统,以用于实施自动制动和/或强制制动。
71、优选根据来自第一制动系统、第二制动系统、第三制动系统、第一能量供应部、第二能量供应部、第三能量供应部的诊断数据和/或根据车辆的高压电池、尤其是牵引电池的至少一个运行参数进行操控。
72、此外,所述控制单元可以实施成用于,
73、-操控车辆的另外的功能基本系统、尤其机电驱动系统,以便通过发电式减速提供制动功能,
74、优选根据来自第一制动系统、第二制动系统、第三制动系统、第一能量供应部、第二能量供应部、第三能量供应部的诊断数据和/或根据车辆的高压电池、尤其是牵引电池的至少一个运行参数进行操控。
75、此外,控制单元实施成用于,
76、-操控驾驶员-车辆界面,以便通知驾驶员有关故障的信息和/或警告驾驶员和/或以便输出用于进一步运行车辆的建议,例如寻找维修车间。在自主行驶的车辆中,驾驶员-车辆界面可称为用户-车辆界面或乘客-车辆界面。
77、此外,控制单元可以实施成用于,
78、-通知驾驶员有关剩余的行驶距离和/或剩余的行驶时间的信息。
79、本发明此外提供:一种具有制动系统结构的车辆,该制动系统结构可以如上所述实施。借助根据本发明的车辆,可实现上文与根据本发明的制动系统结构相关所描述的相同的优点。当前全面参考这些优点。
80、此外,在车辆中可以设置有转向系统或线控转向系统,该转向系统或线控转向系统可具有以下子系统:
81、-用于提供转向功能的第一转向系统,
82、该第一转向系统自主地构造和/或具有第一能量供应部;
83、-用于为转向功能提供第一回退层级的第二转向系统,
84、该第二转向系统自主地构造和/或具有第二能量供应部;
85、-以及用于为转向功能提供第二回退层级的第三转向系统,尤其是通过车轮选择性的制动。
86、在此,第三转向系统可以至少部分在功能上通过车辆的另外的基本功能系统、尤其是通过初级制动系统和/或次级制动系统和/或驾驶员辅助系统实现。
87、有利地,第三转向系统可以实施成用于通过车轮选择性的制动来提供转向功能。
88、第三转向系统还可以具有用于检测转向请求的第三检测装置。例如,第三检测装置可以具有用于检测转向请求的第三方向盘角度传感器。此外,第三检测装置可以至少部分在功能上通过车辆的其他功能基本系统实现,尤其是通过驾驶员辅助系统、优选车道保持辅助装置、自动导航装置等来实现。
89、第三检测装置可以具有用于将检测到的转向请求转发给控制单元的第三传输系统。此外,可以设置有第一信号线路,该第一信号线路实施成用于将检测到的转向请求从控制单元转发给第一转向系统。此外,可以设置有第二信号线路,该第二信号线路实施成用于将检测到的转向请求从控制单元转发给第二转向系统。
90、第三能量供应部可用于第一转向系统。
本文地址:https://www.jishuxx.com/zhuanli/20240929/312255.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表