驾驶支援装置、驾驶支援方法及程序与流程
- 国知局
- 2024-10-15 10:25:09
本发明涉及驾驶支援装置、驾驶支援方法及程序。
背景技术:
1、近年来,公开了进行自动减速控制和自动转向控制的车辆控制装置的发明(例如参照专利文献1)。
2、在先技术文献
3、专利文献
4、专利文献1:日本特开2020-50010号公报
技术实现思路
1、发明要解决的课题
2、关于除了自动减速控制以外还能够进行自动转向控制的车辆,对于车辆的周边环境的骤变也能够迅速应对的概率变高,控制的富余度变得比较高。另一方面,在对象物体的侧方不存在躲避空间的情况下难以进行自动转向控制,因此关于控制的富余度而与仅进行自动减速控制的车辆相比无变化。在以往的技术中,有时不能进行与这样的环境的不同相应的动作。
3、本发明是考虑这样的情况而完成的,其目的之一在于提供能够进行与车辆的周边状况相应的恰当的预备动作的驾驶支援装置、驾驶支援方法及程序。
4、用于解决课题的方案
5、本发明所涉及的驾驶支援装置、驾驶支援方法及程序采用了以下的结构。
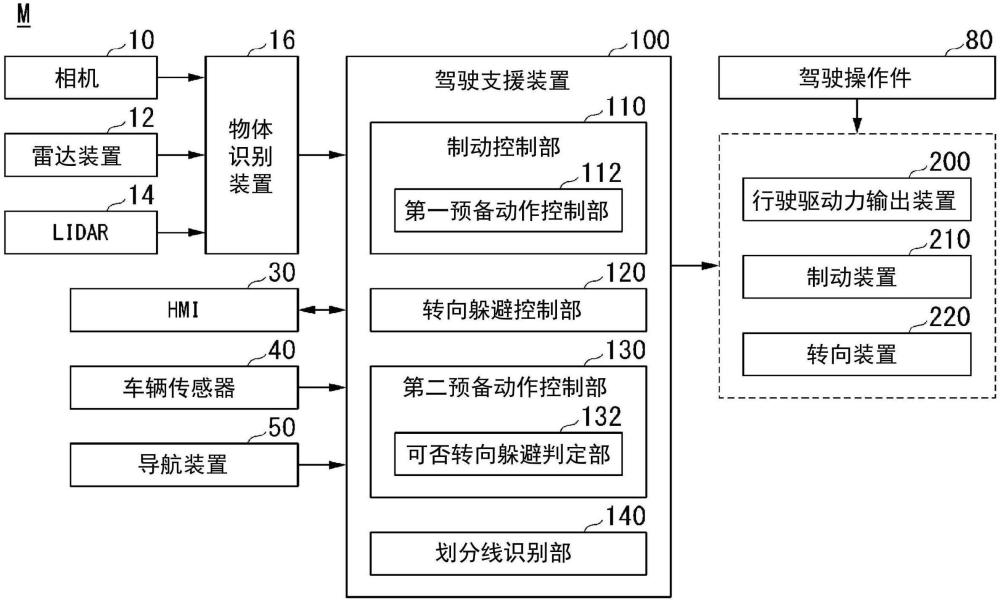
6、(1):本发明的一方案所涉及的驾驶支援装置具备:划分线识别部,其识别对车辆的周边的行驶路进行划分的划分线;制动控制部,其参照对存在于所述车辆的前方的物体的存在进行检知的检知器件的输出,在所述物体中的对象物体与所述车辆之间的接近程度满足第一条件的情况下,指示所述车辆的制动装置使所述车辆停止;以及转向躲避控制部,其指示所述车辆的转向装置通过转向来躲避与所述对象物体接触,所述制动控制部包括第一预备动作控制部,所述第一预备动作控制部在所述接近程度满足第二条件的情况下,进行第一预备动作,所述驾驶支援装置还具备第二预备动作控制部,所述第二预备动作控制部在所述接近程度满足第三条件、且在满足所述第三条件的时间点判定为在所述对象物体的侧方的行驶路中的任一方均不存在在进行基于所述转向的躲避之后能够行进的空间的情况下,进行第二预备动作,所述第一条件是与所述第二条件相比在所述接近程度较高的情况下满足的条件,所述第二条件是与所述第三条件相比在所述接近程度较高的情况下满足的条件,所述第二预备动作控制部在基于由所述划分线识别部识别出的多条划分线中的两条划分线划分的车道的宽度而判定为存在误识别着的车道的情况下,基于误识别着的车道以外的车道的信息来确定所述对象物体的侧方的行驶路。
7、(2):在上述(1)的方案的基础上,在由所述划分线识别部识别出的多条划分线中的两条划分线划分的车道的宽度小于阈值的情况下,删除所述两条划分线中的一方而识别车道,并基于识别出的车道来确定所述对象物体的侧方的行驶路。
8、(3):在上述(2)的方案的基础上,所述阈值是基于所述车辆行驶的车道的宽度而设定的值。
9、(4):在上述(1)~(3)中任一项的方案的基础上,所述第二预备动作控制部在由所述两条划分线划分的车道的宽度小于阈值的情况下,删除所述两条划分线中的距所述车辆远的一方的划分线。
10、(5):在上述(1)~(3)中任一项的方案的基础上,所述第二预备动作控制部在由所述两条划分线划分的车道的宽度小于阈值的情况下,删除所述两条划分线中的由所述划分线识别部识别的识别程度小的一方的划分线。
11、(6):在上述(1)~(5)中任一项的方案的基础上,所述第二预备动作控制部在由所述两条划分线划分的车道的宽度小于阈值的情况下,基于所述两条划分线的线种类来删除一方的划分线。
12、(7):在上述(1)~(6)中任一项的方案的基础上,所述第二预备动作是与所述第一预备动作相比在较早的时机开始的动作。
13、(8):在上述(1)~(7)中任一项的方案的基础上,所述第一预备动作和所述第二预备动作中的至少一方是指示所述制动装置输出比所述制动控制部指示所述制动装置输出的制动力小的制动力的动作。
14、(9):在上述(1)~(8)中任一项的方案的基础上,所述第一预备动作和所述第二预备动作中的至少一方是指示输出装置进行用于引起注意的显示、声音输出或振动输出的动作。
15、(10):本发明的其他方案所涉及的驾驶支援方法使驾驶支援装置进行如下处理:识别对车辆的周边的行驶路进行划分的划分线;参照对存在于所述车辆的前方的物体的存在进行检知的检知器件的输出,在所述物体中的对象物体与所述车辆之间的接近程度满足第一条件的情况下,进行指示所述车辆的制动装置使所述车辆停止这一处理、以及指示所述车辆的转向装置通过转向来躲避与所述对象物体接触这一处理中的一方或双方;在所述对象物体与所述车辆之间的接近程度满足第二条件的情况下,进行第一预备动作;以及在所述对象物体与所述车辆之间的接近程度满足第三条件、且在满足所述第三条件的时间点判定为在所述对象物体的侧方的行驶路中的任一方均不存在在进行基于所述转向的躲避之后能够行进的空间的情况下,进行第二预备动作,所述第一条件是与所述第二条件相比在接近程度较高的情况下满足的条件,所述第二条件是与所述第三条件相比在接近程度较高的情况下满足的条件,在基于由识别出的多条划分线中的两条划分线划分的车道的宽度而判定为存在误识别着的车道的情况下,基于误识别着的车道以外的车道的信息来确定所述对象物体的侧方的行驶路。
16、(11):本发明的其他方案所涉及的程序使计算机进行如下处理:识别对车辆的周边的行驶路进行划分的划分线;参照对存在于所述车辆的前方的物体的存在进行检知的检知器件的输出,在所述物体中的对象物体与所述车辆之间的接近程度满足第一条件的情况下,进行指示所述车辆的制动装置使所述车辆停止这一处理、以及指示所述车辆的转向装置通过转向来躲避与所述对象物体接触这一处理中的一方或双方;在所述对象物体与所述车辆之间的接近程度满足第二条件的情况下,进行第一预备动作;以及在所述对象物体与所述车辆之间的接近程度满足第三条件、且在满足所述第三条件的时间点判定为在所述对象物体的侧方的行驶路中的任一方均不存在在进行基于所述转向的躲避之后能够行进的空间的情况下,进行第二预备动作,所述第一条件是与所述第二条件相比在接近程度较高的情况下满足的条件,所述第二条件是与所述第三条件相比在接近程度较高的情况下满足的条件,在基于由识别出的多条划分线中的两条划分线划分的车道的宽度而判定为存在误识别着的车道的情况下,基于误识别着的车道以外的车道的信息来确定所述对象物体的侧方的行驶路。
17、发明效果
18、根据上述(1)~(11)的方案,能够进行与车辆的周边状况相应的恰当的预备动作。
技术特征:1.一种驾驶支援装置,其中,
2.根据权利要求1所述的驾驶支援装置,其中,
3.根据权利要求2所述的驾驶支援装置,其中,
4.根据权利要求1至3中任一项所述的驾驶支援装置,其中,
5.根据权利要求1至3中任一项所述的驾驶支援装置,其中,
6.根据权利要求1至3中任一项所述的驾驶支援装置,其中,
7.根据权利要求1至6中任一项所述的驾驶支援装置,其中,
8.根据权利要求1至7中任一项所述的驾驶支援装置,其中,
9.根据权利要求1至8中任一项所述的驾驶支援装置,其中,
10.一种驾驶支援方法,其中,
11.一种程序,其中,
技术总结驾驶支援装置识别划分车辆的周边的行驶路的划分线,在存在于车辆的前方的物体中的对象物体与车辆的接近程度满足第一条件的情况下进行指示车辆的制动装置使车辆停止及指示车辆的转向装置通过转向躲避与对象物体接触中的一方或双方,在对象物体与车辆的接近程度满足第二条件的情况下进行第一预备动作,在对象物体与车辆的接近程度满足第三条件且在满足第三条件的时间点判定为在对象物体的侧方的行驶路中的任一方均不存在进行基于转向的躲避后能行进的空间的情况下进行第二预备动作,在基于由识别出的多条划分线中的两条划分线划分的车道的宽度判定为存在误识别着的车道的情况下,基于误识别着的车道以外的车道的信息确定对象物体的侧方的行驶路。技术研发人员:金田雄司,牛木僚,古川拓弥,铃木润受保护的技术使用者:本田技研工业株式会社技术研发日:技术公布日:2024/10/10本文地址:https://www.jishuxx.com/zhuanli/20241014/317621.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表